
Rumah >Peranti teknologi >AI >Bagaimana untuk meningkatkan kecekapan kerjasama kelompok? Pasukan China dan asing bekerjasama untuk membangunkan strategi kawalan pembentukan robot berdasarkan anjakan min
Bagaimana untuk meningkatkan kecekapan kerjasama kelompok? Pasukan China dan asing bekerjasama untuk membangunkan strategi kawalan pembentukan robot berdasarkan anjakan min

- PHPzke hadapan
- 2023-07-14 17:50:23892semak imbas
Pertimbangkan senario "orang ramai yang beratur untuk memasuki lif". Sekiranya orang yang masuk terlebih dahulu adalah "selfish", maka dia akan berhenti di tempatnya selepas memasuki lif, yang akan menghalang orang di belakangnya daripada memasuki lif. Jika orang di hadapan "tidak mementingkan diri", maka dia akan mengambil inisiatif untuk masuk, supaya orang di belakang boleh memasuki lif dengan lancar.
Diinspirasikan oleh senario ini, para penyelidik membangunkan strategi penerokaan tanpa mementingkan diri sendiri Strategi mudah ini boleh meningkatkan kecekapan kerjasama sistem kluster robot Hasilnya diterbitkan dalam Nature Communications pada Jun 2023.

▍Memperkenalkan penerokaan "tidak mementingkan diri sendiri": menjadikan kerjasama robot lebih cekap
Di antara banyak sistem kawanan robot, kawalan pembentukan kawanan adalah isu penting dan unik. Berbanding dengan masalah kerjasama kluster yang lain, kawalan pembentukan mempunyai cabaran teknikal yang unik, iaitu pembentukan global sebenarnya merupakan kekangan global. Kekangan ini mewujudkan hubungan persaingan antara robot yang pada asalnya bekerjasama. Pada dasarnya, hubungan kompetitif inilah yang membawa banyak kesukaran kepada kawalan pembentukan.
Kaedah tradisional biasanya menggunakan peruntukan matlamat untuk menyelesaikan masalah persaingan antara robot. Namun, kaedah berasaskan peruntukan mempunyai masalah toleransi kesalahan dan kebolehsuaian yang lemah. Apabila matlamat yang ditetapkan tidak munasabah atau beberapa robot tidak berfungsi, matlamat perlu sentiasa ditetapkan semula, yang akan membawa kepada kecekapan yang rendah.
Baru-baru ini, penyelidik dari Universiti Westlake, Universiti Beihang, Universiti Tsinghua dan Universiti Sheffield di UK telah mencadangkan kaedah kawalan penyelarasan robot baharu berdasarkan strategi penerokaan "tidak mementingkan diri sendiri" Intinya adalah melalui algoritma berasaskan Mean-Shift Untuk menyelesaikan konflik persaingan antara robot: Iaitu, apabila robot meramalkan bahawa ia akan bersaing dengan robot sekeliling, ia akan secara aktif meninggalkan kedudukan semasanya dan berpindah ke kawasan yang lebih terbuka. Ia dipanggil strategi "tidak mementingkan diri sendiri" kerana ia boleh "secara aktif" menyelesaikan konflik.
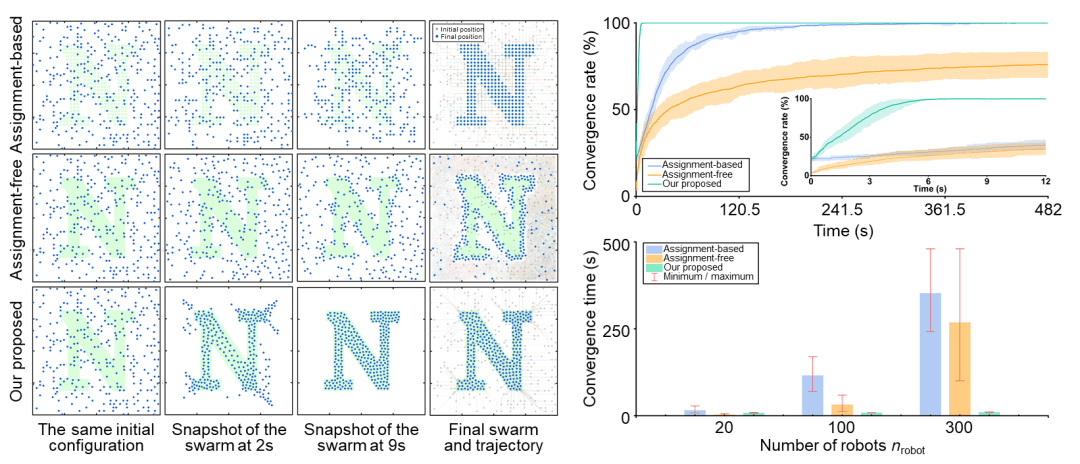
Berbanding dengan kerja penyelidikan terkini, kecekapan strategi penerokaan "tidak mementingkan diri" yang dicadangkan boleh dipertingkatkan berpuluh-puluh kali ganda apabila saiz kelompok besar, dan peningkatan ini akan dipertingkatkan lagi apabila saiz kelompok meningkat. Selain itu, kerana ia tidak bergantung pada peruntukan sasaran, strategi ini sememangnya bertolak ansur dengan kesalahan dan boleh disesuaikan, dan boleh diperluaskan kepada penerokaan angkasa lepas yang kompleks, pengendalian kolaboratif dan tugas lain.
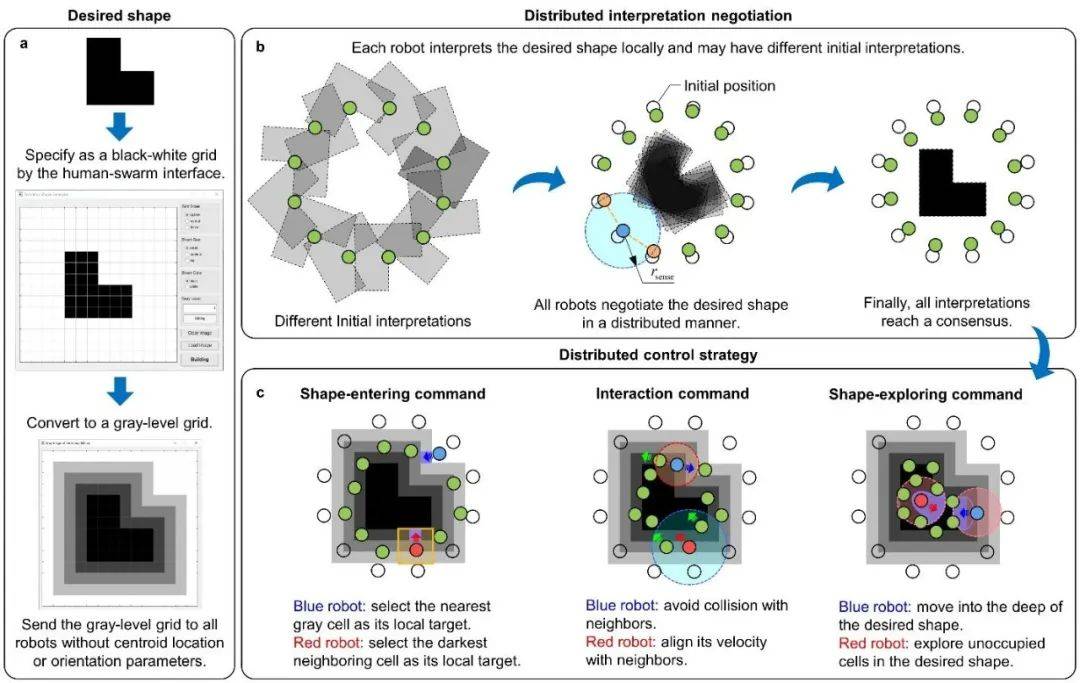
Strategi penerokaan "tidak mementingkan diri sendiri" terdiri daripada tiga bahagian. Bahagian pertama ialah sistem interaksi manusia-kelompok, yang digunakan untuk merumuskan pembentukan geometri yang diperlukan oleh manusia. Bahagian kedua ialah algoritma perundingan yang diedarkan Semua robot merundingkan parameter Euclidean bagi pembentukan sasaran, termasuk kedudukan dan arah, dengan jiran sekeliling mereka secara teragih. Bahagian ketiga dan paling penting ialah algoritma kawalan pembentukan teragih. Algoritma kawalan terdiri daripada tiga arahan kawalan. Yang pertama ialah arahan kemasukan formasi, iaitu memperkenalkan robot ke dalam formasi sasaran. Yang kedua ialah arahan penerokaan pembentukan, yang digunakan untuk meneroka kawasan yang boleh dilaksanakan dalam pembentukan melalui mekanisme Mean-Shift. Yang ketiga ialah arahan interaktif, yang digunakan untuk mencapai pengelakan perlanggaran dan penjajaran kelajuan antara robot.
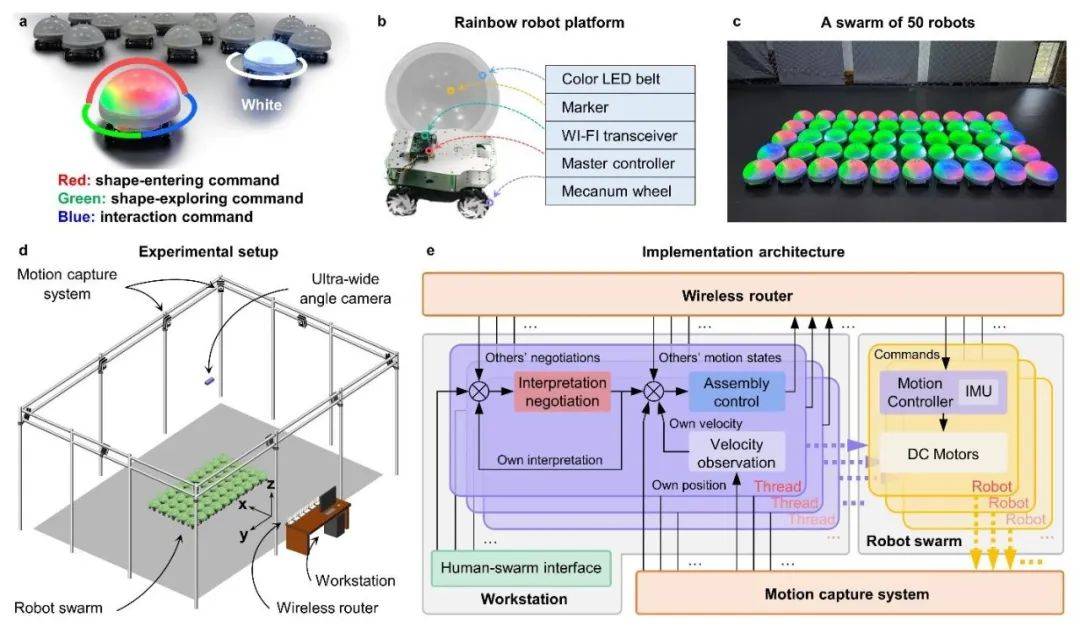
yang mengandungi 50 robot tanah. Eksperimen yang berkaitan telah dijalankan dengan sokongan sistem tangkapan gerakan dalaman dan dilaksanakan secara selari teragih berbilang benang.
▍Kluster robot melakukan pelbagai tugas: memiliki kerjasama yang cekap dan keupayaan kawalan autonomi
Strategi penerokaan "tidak mementingkan diri" bolehmengawal organisasi diri robot untuk membentuk bentuk bukan cembung yang kompleks. Sebagai contoh, pembentukan "kepingan salji" dengan cawangan yang kaya Di bawah strategi ini, kelompok robot boleh merealisasikan pembentukan dengan tepat tanpa jatuh ke dalam optimum tempatan. Selain itu, kawanan robot boleh membentuk formasi bukan cembung yang berbeza dengan cara ini dan dapat bertukar dengan lancar dari satu bentuk ke bentuk yang lain.
Strategi penerokaan "tidak mementingkan diri" mempunyai peningkatan kecekapan berpuluh kali ganda berbanding dengan kerja penyelidikan terkini, dan penambahbaikan ini akan dipertingkatkan lagi apabila saiz kelompok bertambah.
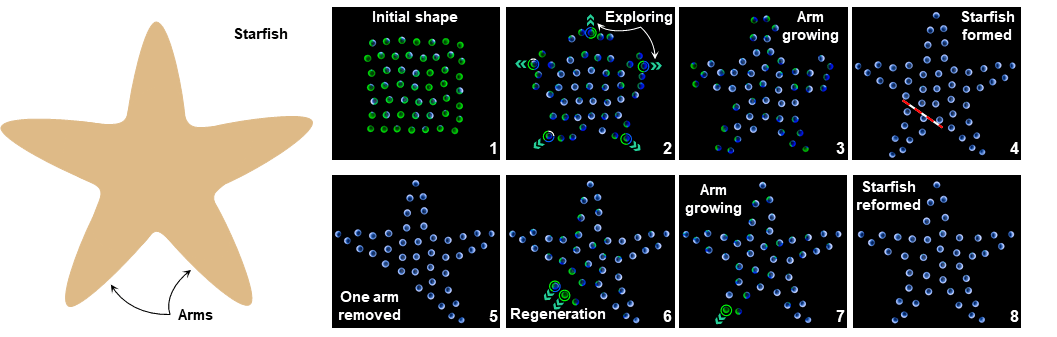
Oleh kerana ia tidak dihadkan oleh masalah seperti peruntukan sasaran dan perubahan dalam bilangan robot, strategi penerokaan "tidak mementingkan diri sendiri" mempunyai keupayaan penyesuaian. Sebagai contoh, apabila sesetengah robot dialih keluar daripada kluster, keseluruhan sistem tidak memerlukan sebarang pengesanan kesalahan atau kawalan toleransi kesalahan dan boleh membentuk semula dengan lancar kepada pembentukan, yang memberikan keseluruhan sistem tahap keupayaan "penjanaan semula" tertentu.
Satu lagi ciri strategi penerokaan "tidak mementingkan diri" ialah keupayaan untuk menjejak formasi yang berbeza-beza masa. Aplikasi penting adalah untuk merealisasikan pengendalian kolaboratif berbilang robot. Dalam proses ini, dalam satu tangan, robot mesti mengekalkan pembentukan, dan sebaliknya, ia mesti mengikut pemimpin untuk mencapai pergerakan pembentukan, dengan itu mencapai pengangkutan barang yang diselaraskan.
Selain itu, strategi penerokaan "tidak mementingkan diri sendiri" boleh digunakan untuk meneroka persekitaran yang kompleks. Sebagai contoh, anda boleh meniru orang ramai yang memasuki bilik melalui pintu masuk yang sempit tanpa tersekat di pintu masuk. Perlu dinyatakan bahawa Contoh ini menerangkan dengan jelas strategi penerokaan "tidak mementingkan diri sendiri". Sangat mirip dengan adegan kehidupan orang yang memasuki lif: jika ramai orang ingin memasuki lif, Jika seseorang itu "mementingkan diri sendiri", maka dia akan berhenti bergerak selepas memasuki lif kerana dia telah mencapai matlamatnya . Walau bagaimanapun, ini akan menyekat kemasukan mereka di belakang anda. Kalau orang ni "selfless", maka dia akan ambil inisiatif masuk ke dalam, supaya orang di belakang boleh masuk dengan lancar.
Contoh lain ialah ia boleh digunakan untuk meneroka labirin yang kompleks. Walaupun terdapat banyak struktur tidak cembung seperti sudut dalam mez, strategi ini masih boleh berjaya mencapai liputan penuh labirin tanpa jatuh ke dalam optimum tempatan kerana kebolehjelajahannya yang baik.
▍Kesimpulan
Idea algoritma yang dicadangkan dalam artikel ini sangat mudah, tetapi ia adalah idea yang begitu mudahyang menyelesaikan masalah penting yang telah lama dihadapi dalam kawalan pembentukan kelompok. Pada masa hadapan, keupayaan persepsi platform robot boleh diperluaskan lagi untuk menjadikan keseluruhan sistem lebih pintar dan membolehkan kemunculan tingkah laku kawanan yang benar-benar serupa dengan organisma yang sangat pintar.
▍Sumber artikel
G. Sun, R. Zhou, Z. Ma, Y. Li, R. Groß, Z. Chen, dan S. Zhao*, "Penjelajahan anjakan min dalam himpunan kawanan robot", Nature Communications, vol , ms 3476, 2023. https://doi.org/10.1038/s41467-023-39251-5
Atas ialah kandungan terperinci Bagaimana untuk meningkatkan kecekapan kerjasama kelompok? Pasukan China dan asing bekerjasama untuk membangunkan strategi kawalan pembentukan robot berdasarkan anjakan min. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI