
Rumah >Peranti teknologi >AI >Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!
Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2023-06-15 11:41:291164semak imbas
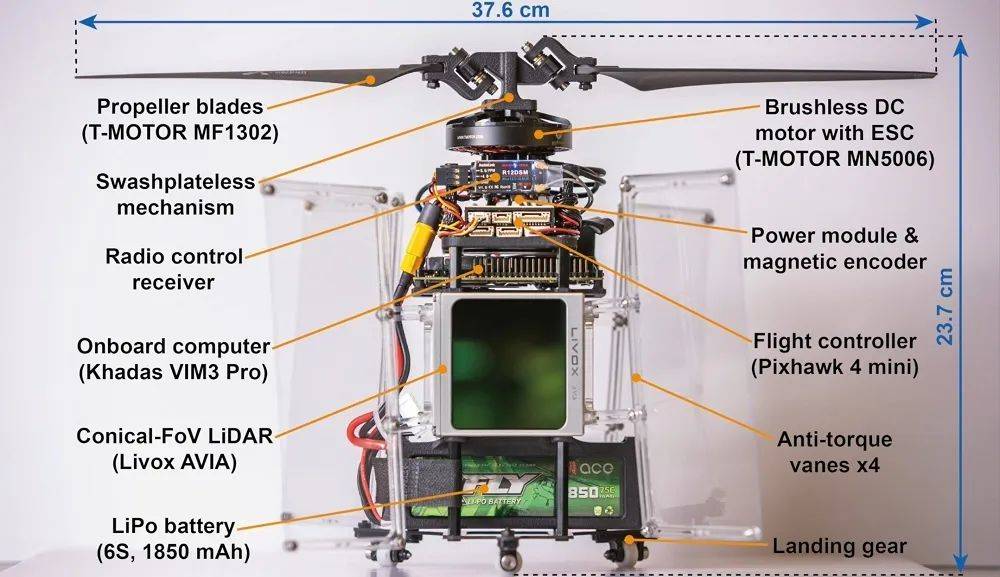
Rajah struktur PULSAR
[Laporan Komprehensif Dron Rangkaian Global] Berita dari Universiti Hong Kong, baru-baru ini, sebuah pasukan yang diketuai oleh Dr. Zhang Fu, Penolong Profesor Jabatan Kejuruteraan Mekanikal, Pusat Pengajian Kejuruteraan, Universiti Hong Kong (HKU) , baru-baru ini telah mereka bentuk penerbangan berkuasa tanpa memerlukan pemandu Drone pengesan radar dipanggil PULSAR. "Pulsar" mempunyai pelbagai fungsi seperti penderiaan dan pemetaan, sama seperti adegan dalam filem fiksyen sains "Prometheus" di mana manusia menggunakan pengesan putaran untuk membina peta tiga dimensi gua dalam masa nyata, menjadi kenyataan.
Menurut laporan, kepentingan dron semakin meningkat secara beransur-ansur dalam banyak bidang seperti mencari dan menyelamat, penerokaan gua, dan pemetaan seni bina. Pasukan Dr. Zhang menumpukan pada gerakan putaran "Pulsar" menggunakan penerbangan berkuasa dan tidak perlu memandu penderiaan radar kerana gerakan putaran mereka dan mod pengimbasan pancaran lidar, mereka secara intuitif serupa dengan pulsar dalam astronomi sangat serupa. "Pulsar" dilengkapi dengan komputer mikro onboard dan lidar, membolehkan persepsi autonomi sepenuhnya, pemetaan, perancangan dan kawalan, tanpa memerlukan bantuan peralatan luaran sama ada dalam persekitaran dalaman atau luaran. Penggerak tunggal digunakan pada pulsar untuk memacu mekanisme tanpa plat swashplate yang boleh menghasilkan tujahan dan tork secara serentak.
Pasukan Dr. Zhang menggunakan "Pulsar" untuk menjalankan eksperimen dalam penerokaan alam sekitar dan pengelakkan halangan dinamik berbilang arah. dalam persekitaran dalam masa nyata.
"Pulsar" mempunyai keupayaan untuk menjalankan navigasi automatik sepenuhnya pada waktu malam, menunjukkan bahawa prestasi navigasinya tidak dihadkan oleh keadaan cahaya. Selain itu, ia boleh mengendalikan gangguan angin luaran. Walaupun ia terganggu oleh kelajuan angin maksimum 4.5 meter sesaat, "Pulsar" masih boleh mengekalkan kedudukan melayang dalam julat yang kecil. Ciri-ciri ini menjadikan pesawat lebih selamat dan lebih stabil dalam persekitaran liar.
Penderia juga boleh meningkatkan medan pandangan melalui pergerakan putaran intrinsik, dengan itu meningkatkan keupayaan persepsi dron dan kecekapan misi, sebagai tambahan kepada keupayaan di atas. Pada masa ini terdapat dua kaedah utama yang digunakan untuk mengembangkan bidang pandangan penderia, dan ciri umumnya ialah penggunaan kuasa keseluruhan yang tinggi. Satu pendekatan yang mungkin adalah menggunakan penderia dengan medan pandangan yang besar, seperti kanta mata ikan, kamera reflektif atau lidar 360 darjah. Walau bagaimanapun, kamera mata ikan dan kamera pantulan diri sering mengalami ubah bentuk yang ketara, dan medan pandangan lidar 360 darjah dalam arah menegak masih sempit dan resolusinya rendah. Kaedah lain ialah menggunakan berbilang penderia secara serentak, seperti sistem berbilang kamera atau sistem berbilang lidar Walau bagaimanapun, sistem berbilang sensor akan membawa kos tambahan dan masa pemprosesan data yang lebih lama. Begitu juga, menggunakan sistem gimbal untuk meluaskan bidang pandangan juga akan membawa masalah yang sama.
Pasukan Dr. Zhang mendapati bahawa "Pulsar" boleh menjimatkan 26.7% penggunaan tenaga sambil mengekalkan fleksibiliti yang baik berbanding dengan dron quadcopter dengan luas bilah dan muatan yang sama. Sistem kuasa pulsar menggunakan penggerak tunggal untuk mencapai kecekapan penukaran tenaga yang lebih tinggi, dengan kecekapan keseluruhan sehingga 6.65 gram per watt. Dengan hanya kipas dengan diameter hanya 37.6 cm dan bateri kecil berkapasiti 41 watt jam, dron 1234 gram ini mencapai masa hover lebih daripada 12 minit. Jika lidar digantikan dengan kipas dan bateri yang lebih besar, masa hover "Pulsar" boleh dilanjutkan kepada lebih daripada 40 minit.
Hasil penyelidikan telah diterbitkan dalam Science Robotics. Artikel itu bertajuk "UAV berputar sendiri, satu-gerakan dengan medan pandangan sensor lanjutan untuk navigasi autonomi" dan diterbitkan dalam gambar halaman utama Laman Web Sains.
Dr. Zhang berkata bahawa platform penyelidikan yang ditubuhkan oleh pasukannya adalah kondusif untuk penyelidikan yang lebih mendalam mengenai dron berputar “Kami percaya bahawa penubuhan platform ini akan memberi manfaat untuk meneroka kaedah kawalan dron di bawah kelajuan tinggi. putaran dan kawalan dron di bawah gerakan ganas.” Teknologi Penyetempatan dan Pemetaan (SLAM)”
.Atas ialah kandungan terperinci Artifak spelunking? Dron pusingan sendiri pemutar tunggal dengan navigasi autonomi, lebih cekap!. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI