
Rumah >Peranti teknologi >AI >Isu teratas diterbitkan! Pasukan Profesor Li Yibin dari Universiti Shandong membangunkan robot komposit berkaki roda yang mudah dan mudah dikendalikan
Isu teratas diterbitkan! Pasukan Profesor Li Yibin dari Universiti Shandong membangunkan robot komposit berkaki roda yang mudah dan mudah dikendalikan

- 王林ke hadapan
- 2023-06-08 10:15:511520semak imbas
Manusia telah mengimpikan untuk membangunkan mekanisme mudah alih yang boleh menyesuaikan diri dengan pelbagai rupa bumi liar sejak zaman purba. Platform mudah alih berodamempunyai kestabilan pergerakan dan kecekapan pergerakan yang baik, tetapi sukar untuk bergerak di medan yang kasar robot berkakimempunyai kebolehsuaian rupa bumi dan fleksibiliti pergerakan, tetapi kestabilan pergerakan dan kecekapan tenaganya memerlukan; untuk diperbaiki.
Untuk menggabungkan kelebihan pergerakan beroda dan pergerakan kaki kaki, mekanisme pergerakan komposit kaki roda telah dilahirkan. Mekanisme komposit roda dan kaki biasa terutamanya termasuk roda berbentuk khas (seperti RHex), roda jejari (seperti Whegs), roda cacat (seperti OmniWheg), kaki roda dalam siri (seperti Wheeled-ANYmal), dsb. ., seperti yang ditunjukkan dalam Rajah X.
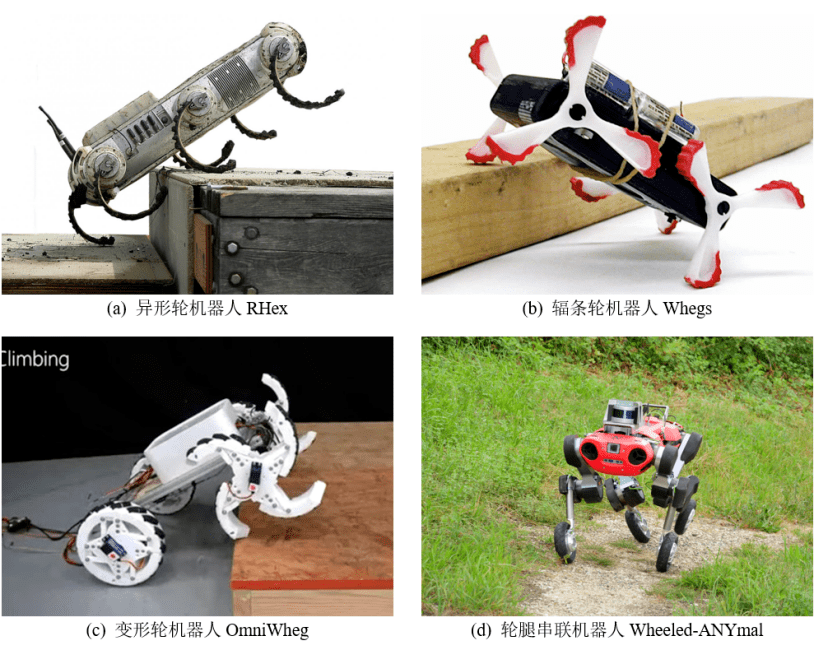
Rajah 1 Robot komposit berkaki roda biasa
Baru-baru ini, pasukan Profesor Li Yibin dari Universiti Shandong, Profesor Ma Shugen dari Universiti Ritsumeikan, Jepun, Profesor Liu Jinguo dari Institut Automasi Shenyang, Akademi Sains China dan Penyelidik Bersekutu Kong Lingyu dari Makmal Zhijiang telah dibangunkan sejenis robot komposit berkaki roda baharu, dinamakan For Q-Whex, ditunjukkan dalam Rajah 2.
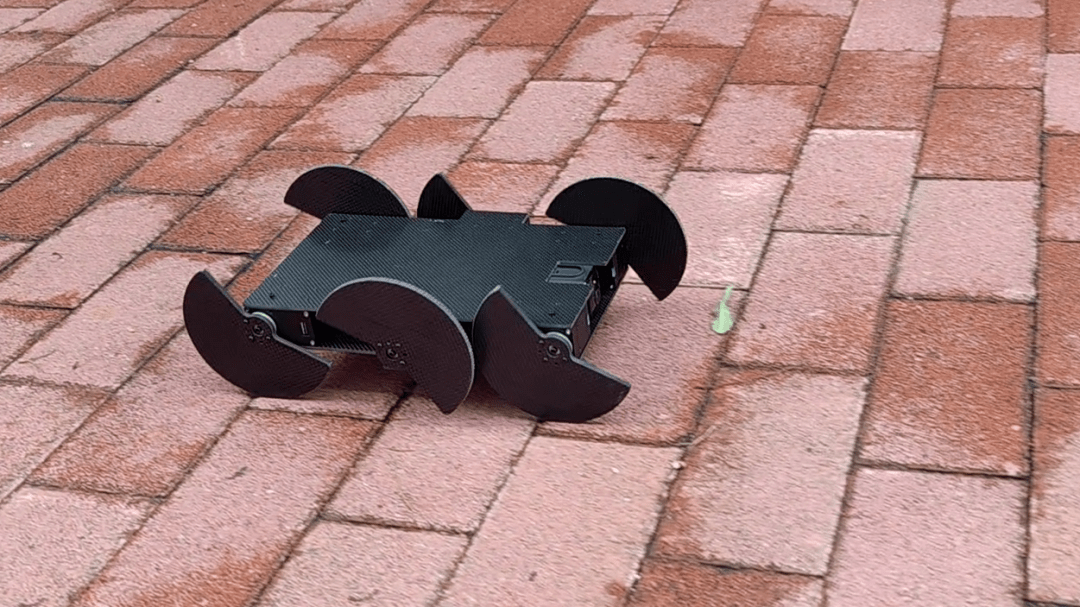
Rajah 2 Robot Q-Whex
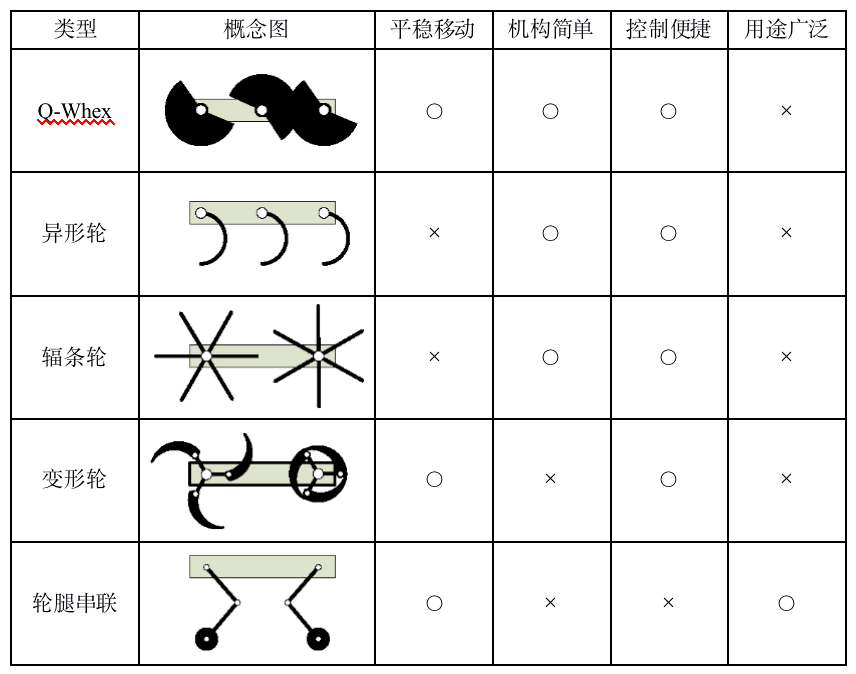
Q-Whex boleh bergerak dengan lancar di atas tanah rata seperti platform mudah alih beroda, dan juga boleh memanjat halangan yang lebih tinggi daripada ketinggian casisnya seperti robot berkaki. Berbanding dengan robot mudah alih komposit berkaki roda yang lain, Q-Whex mempunyai kelebihan dari segi kelancaran pergerakan, kerumitan mekanisme dan kesukaran kawalan, seperti ditunjukkan dalam Jadual 1.
Jadual 1 Perbandingan antara Q-Whex dan jenis lain robot mudah alih komposit berkaki roda
Karya ini diterbitkan dalam Journal of Field Robotics di bawah tajuk "Q-Whex: A simple and highly mobile quasi-wheeled hexapod robot".
▍Mekanisme yang ringkas dan kawalan yang mudah
Robot Q-Whex yang ditunjukkan dalam kertas adalah 277.5 mm panjang, 204.8 mm lebar, 39.5 mm tinggi, mempunyai berat mati 2.4kg, dan boleh mencapai kelajuan hadapan 0.44 m/s dengan beban 2.65 kg . Q-Whex terdiri daripada badan utama dan enam sistem pacuan separuh roda berbentuk sektor isomorfik. Litar kawalan, IMU, bateri dan kamera disepadukan di dalam batang badan Motor pemacu struktur kaki roda juga diletakkan di dalam batang badan Setiap separuh roda mempunyai struktur berbentuk kipas 210° dan aci keluaran motor disambungkan ke pusat kipas untuk mencapai putaran Apabila tepi lengkok menyentuh tanah, ia adalah pergerakan beroda Apabila tepi berbentuk kipas menyentuh tanah, kesan halangan jenis kaki boleh dicapai.
Pengeluaran dan pemasangan Q-Whex adalah sangat mudah, seperti yang ditunjukkan dalam Rajah 3. Komponen di dalam motor dan batang badan dipasang di antara dua plat gentian karbon, dan setiap roda separuh sektor juga diperbuat daripada plat gentian karbon.

Rajah 3 Q-Whex paparan meletup
Kawalan pergerakan Q-Whex juga sangat mudah Setiap roda separuh berbentuk sektor berputar secara berterusan boleh dicapai dengan mengawal perbezaan kelajuan antara separuh roda berbentuk sektor kiri dan separuh berbentuk sektor kanan. -roda robot Dengan mengawal sudut putaran setiap roda separuh berbentuk sektor, Perbezaan fasa antara mereka boleh menghasilkan gaya berjalan yang berbeza. Rajah 4 menunjukkan empat gait tipikal Q-Whex.
Rajah 4 Paparan gaya berjalan biasa Q-Whex
▍Roda dan kaki digabungkan untuk mendaki bukit dan mengatasi halangan
Q-Whex menggunakan gaya berjalan segi tiga dan boleh bergerak dengan lancar di atas tanah rata seperti platform mudah alih beroda, seperti yang ditunjukkan dalam Rajah 5.

Rajah 5 Q-Whex bergerak dengan lancar di atas tanah rata
Q-Whex juga boleh mengendalikan salji, ais, batu kelikir dan permukaan lain dengan mudah, seperti yang ditunjukkan dalam Rajah 6.

Rajah 6 Q-Whex beroperasi pada pelbagai permukaan
Menggunakan gaya berjalan simetri, anda boleh naik dan turun cerun 32 darjah, seperti yang ditunjukkan dalam Rajah 7.

Rajah 7 Q-Whex pada cerun 32 darjah
Boleh menaiki anak tangga yang berterusan, seperti yang ditunjukkan dalam Rajah 8.
Gambar 8 Q-Whex memanjat langkah berterusan
Pelbagai rupa bumi berceranggah tidak menjadi masalah, seperti yang ditunjukkan dalam Rajah 9.
Rajah 9 Q-Whex berjalan di kawasan lasak
▍Konfigurasi simetri, tidak takut terbalik
Memandangkan reka bentuk struktur robot Q-Whex menggunakan konfigurasi simetri dalam tiga arah depan dan belakang, kiri dan kanan, serta atas dan bawah, tiada perbezaan antara depan dan belakang serta depan dan belakang semasa pergerakannya . Apabila robot terbalik secara tidak sengaja semasa memandu, ia boleh terus bergerak ke hadapan dalam konfigurasi "mundur ke atas", sekali gus mempunyai toleransi insurans dan kesalahan yang sangat baik untuk risiko dan kemalangan dalam pergerakan persekitaran yang kompleks. Rajah 10 menunjukkan robot tersebut terbalik semasa proses pendakian dan kemudiannya menyelesaikan pendakian dalam postur "back-up".
Rajah 10 Q-Whex boleh terus memandu selepas terbalik
▍Kamera onboard, pengesanan jauh
Peralatan kamera kecil telah dipasang pada robot Q-Whex dan boleh menghantar imej yang dikumpul kepada pengendali jauh dalam masa nyata melalui rangkaian WiFi atau 4G. Oleh itu, Q-Whex boleh melaksanakan tugas pengesanan tanpa pemandu, seperti yang ditunjukkan dalam Rajah 11.
Rajah 11 Q-Whex boleh menggunakan kamera onboard untuk pengesanan jauh
Anda juga boleh mengusik kucing dari jauh, seperti yang ditunjukkan dalam Rajah 12.
Rajah 12 Q-Whex dan kucing
Q-Whex pada asasnya ialah konsep mobiliti komposit kaki roda baharu Kebolehgerakan yang tinggi dan kebolehlaluan yang kuat diperoleh daripada putaran berterusan dan koordinasi fasa bersama enam roda separuh berbentuk sektor yang dipacu secara bebas. Konsep ini boleh digunakan pada platform mudah alih yang diperlukan untuk pemeriksaan industri, pengangkutan logistik, pengesanan medan, dll. Konfigurasi dan saiz yang sesuai harus dipilih mengikut keperluan aplikasi sebenar. Robot tidak perlu menggunakan persepsi atau strategi kawalan yang kompleks, dan kesederhanaan dalam struktur dan kawalannya meningkatkan keteguhan dan kebolehpercayaan sistem.
Pengarang pertama kertas kerja ialah Penyelidik Bersekutu Zhang Guoteng dari Universiti Shandong, e-mel:
guoteng@email.sdu.edu.cn.
Pautan kertas:
https://doi.org/10.1002/rob.22186
Atas ialah kandungan terperinci Isu teratas diterbitkan! Pasukan Profesor Li Yibin dari Universiti Shandong membangunkan robot komposit berkaki roda yang mudah dan mudah dikendalikan. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI