
 Peranti teknologiAIApabila tiada orang sebenar boleh memberi anda pelukan sepenuh hati, robot akan mengambil tindakan
Peranti teknologiAIApabila tiada orang sebenar boleh memberi anda pelukan sepenuh hati, robot akan mengambil tindakanApabila tiada orang sebenar boleh memberi anda pelukan sepenuh hati, robot akan mengambil tindakan

Semua orang mempunyai detik emo, tetapi tidak semua orang dapat mencari seseorang untuk memeluknya.
Titik sakit ini juga dilihat oleh saintis Alexis Block (selepas ini dirujuk sebagai Block). Sejak 2017, dia telah belajar bagaimana untuk mengajar robot untuk memeluk. Dia kemudiannya menjadi ahli "Sekolah Max Planck" Jerman yang terkenal, yang telah menghasilkan 37 pemenang Hadiah Nobel.
Projek ini tidak semudah itu. Kerana mereka telah membuat robot ini selama 6 tahun, ia tidak sejuk, sangat berperikemanusiaan:
- Apabila orang mendekatinya, ia akan mengangkat tangan dan bertanya dengan penuh semangat, "Bolehkah saya mendapatkan pelukan?"; Ia akan menyesuaikan diri mengikut ketinggian seseorang untuk memberikan pelukan yang betul-betul tepat
- Ia juga boleh bertindak balas kepada postur memeluk yang berbeza: contohnya, jika orang mahu berpelukan untuk seketika, ia akan memahami perkara ini dan tidak melepaskan lengan robotnya terlebih dahulu...
 Seberapa nyata pelukan seperti ini?
Seberapa nyata pelukan seperti ini?
Apa yang lebih menakjubkan ialah apabila semua orang bercakap tentang perasaan dipeluk oleh robot, mereka semua mempunyai tindak balas tertentu, seperti "memeluk kekasih", "pelukan menghiburkan daripada ibu", dan orang lain kelihatan seperti "di pengebumian" "Saudara jauh", "rakan yang dilihat pada perlawanan bola sepak", malah ada yang mengatakan ia seperti "memeluk bekas".
Perbezaan dalam surat-menyurat emosi ini berkaitan dengan keadaan psikologi orang pada masa itu, serta tindakan dan tahap robot yang memeluk mereka dalam setiap percubaan.
 Tetapi ini semua menunjukkan bahawa HuggieBot 3.0 yang dibangunkan oleh Max Planck agak "seperti manusia".
Tetapi ini semua menunjukkan bahawa HuggieBot 3.0 yang dibangunkan oleh Max Planck agak "seperti manusia".
Mengapa Institut Max Planck mengajar robot untuk memeluk?
Manusia mengidamkan sentuhan kulit ke kulit.
Sejak dijemput oleh ibu bapa sejak bayi, orang ramai mula rapat dengan orang lain Apabila kita dibelai, dipeluk dan diurut, hormon dilepaskan, yang boleh melegakan tekanan dan kebimbangan, dan menurunkan kadar denyutan jantung dan tekanan darah. .
Terutama pelukan erat yang berlangsung selama lebih dari tiga saat akan meningkatkan lagi keseronokan sentuhan kulit orang Ini juga dipanggil "sentuhan tekanan dalam".
Orang ramai "memeluk 4 kali sehari untuk bertahan, dan memeluk mereka sekurang-kurangnya 8 kali untuk sihat dari segi fizikal dan mental, Virginia Satir, ahli psikoterapi Amerika yang terkenal, mencadangkan teori "Empat Pelukan".
Tetapi anda tahu, tidak selalu ada seseorang yang boleh menemani anda sepanjang masa, jadi anda boleh mencapai "sentuhan tekanan dalam" sendiri dengan membungkus diri anda dengan selimut.
Orang ramai berharap teknologi dapat mengisi jurang persahabatan dan keselesaan.Sebagai contoh, satu pasukan telah membuat gelang tangan elektronik yang boleh menerima maklumat sentuhan: disambungkan ke Bluetooth telefon mudah alih, satu orang mengklik untuk menghantar mesej dan gelang pada tangan orang lain akan memerah dan bergetar.
 Sebuah pasukan juga telah mencipta "baju peluk". Pakaian ini dibenamkan dengan penderia dan digunakan pada kanak-kanak dengan gangguan spektrum autisme: apabila ibu bapa memeluk anak patung pada satu hujung, penderia boleh menangkap kedudukan, kekuatan dan suhu Pelukan. Malah degupan jantung boleh dirasai oleh kanak-kanak di hujung yang lain dalam bentuk pemanasan, getaran dan inflasi.
Sebuah pasukan juga telah mencipta "baju peluk". Pakaian ini dibenamkan dengan penderia dan digunakan pada kanak-kanak dengan gangguan spektrum autisme: apabila ibu bapa memeluk anak patung pada satu hujung, penderia boleh menangkap kedudukan, kekuatan dan suhu Pelukan. Malah degupan jantung boleh dirasai oleh kanak-kanak di hujung yang lain dalam bentuk pemanasan, getaran dan inflasi.
 Tetapi ini tidak mencukupi.
Tetapi ini tidak mencukupi.
Pembangun HuggieBot mendapati bahawa orang sangat sensitif terhadap pelukan, terutamanya dari segi "lokasi sentuhan" dan "intensiti hubungan."
Semakin dekat dua orang secara emosi, semakin banyak kawasan yang dibenarkan untuk disentuh, tetapi bagi orang yang tidak rapat, memeluk mereka dalam kedudukan yang salah akan menjadi "menyerang" tambahan, pelukan tidak cukup kuat, dan ia adalah mudah untuk Nampaknya sembrono, dan menggunakan terlalu banyak kekerasan akan menyakiti orang yang bertentangan. Dan perasaan intensiti ini perlu berbeza-beza dari orang ke orang.
Jadi ciptaan seperti baju peluk dan seumpamanya masih tidak dapat memulihkan pelukan yang cukup hangat dan sebenar.
Terutama selepas mengalami wabak, hubungan emosi orang ramai menjadi lebih rapuh di tengah-tengah jarak dan halangan, dan mereka lebih bersemangat untuk pelukan. Block, ahli pengasas utama HuggieBot, berkata,
Tujuan membangunkan robot ini adalah untuk menggunakannya untuk menghantar pelukan hangat yang sangat antropomorfik untuk menghiburkan mereka yang berada dalam jarak sosial, terutamanya disebabkan oleh wabak itu.
 Brock memeluk robot
Brock memeluk robot
Memberi "pelukan yang sempurna" bukanlah mudah
Bagaimana untuk meningkatkan keselesaan pelukan? Memeluk sesuatu seperti ini terlalu misteri, tetapi saintis masih mahu mengukurnya.
Pada 2017, pasukan itu memulakan percubaan awal mereka, membuat robot yang kelihatan sangat kasar dan mereka bentuk sejumlah 12 jenis pelukan yang berbeza.

Dua lengan dan badan robot prototaip dibalut dengan buih tebal dan kapas
Kemudian, mereka menemui 30 sukarelawan dan meminta robot untuk memberi setiap orang sedozen pelukan: pelukan itu dalam tempoh yang berbeza-beza dan dalam postur yang berbeza.
Tanpa disangka, walaupun robot itu seberat 450 paun dan ketinggiannya lebih kurang sama dengan manusia, tiada siapa yang dihimpitnya, dan tiada yang lari kerana ketakutan.
Sebaliknya, ramai orang berkata, "Saya sangat seronok memeluk robot itu, kerana pengalaman itu baru dan tidak menghairankan maklum balas positif ini menggalakkan Bullock dan pasukannya, Malah mereka mahu mencabarnya "Boleh a robot memberi pelukan lebih baik daripada orang sebenar?"
Jadi, mereka mula-mula menyiasat beberapa robot di pasaran, bermula dengan penyemperit Temple Grandin yang paling awal (1992) dan paling terkenal.

Lihat, ini bukan robot, ia hanya mesin. Mesin itu, yang mencipta tekanan dengan memerah dua panel buih untuk mensimulasikan pelukan, telah digunakan secara meluas untuk merawat kanak-kanak autisme.
Kemudian, produk simulasi haiwan diperoleh berdasarkan ini, tetapi ini hanya menjadikannya lebih "mesra pengguna".
Berdasarkan ini, Bullock dan yang lain membuat HuggieBot generasi pertama. Selain membungkus robot dengan kapas ungu tebal, mereka juga menggunakan pelbagai elemen pemanas untuk menjadikan HuggieBot cukup lembut dan hangat.
Mereka juga mahu mengambil satu lagi langkah ke hadapan: menjadikan robot lebih autonomi.
Jadi, mereka menambah penderia sentuhan pada bahagian belakang robot Penderia ini boleh diregangkan dan boleh mengesan apabila pengguna mula menghubungi dan apabila mereka ingin menamatkan pelukan, dengan itu meramalkan berapa lama dan berapa lama robot harus memberikannya. pengguna. Pelukan "ketat".

Tidak lama kemudian, Bullock mendapati bahawa mereka berfikir terlalu mudah.
Orang ramai sangat sensitif terhadap permulaan dan akhir pelukan. Terutamanya keluarkan sebaik sahaja pengguna menunjukkan bahawa mereka bersedia untuk dikeluarkan terlalu awal atau terlalu lewat dan pengguna akan berasa tidak berpuas hati.
Dalam erti kata lain, sensor sentuhan semasa tidak mencukupi. Jadi, mereka mula membangunkan HuggieBot 2.0 - Peranti pintar pertama industri yang menggunakan persepsi visual dan sentuhan pada masa yang sama untuk memberikan pelukan.

Kepala segi empat tepat dan comel dalam gambar di atas sebenarnya mempunyai banyak pengetahuan: ia adalah kotak cetakan 3D yang dibuat khas, yang mengandungi komputer mikro Dell OptiPlex 7050 yang mengawal keseluruhan robot, kamera pengesan kedalaman Intel RealSense, dan skrin muka robot, pembesar suara kecil dan banyak kabel.
Ia mempunyai tapak berbentuk V di bahagian bawah, yang memudahkan pengguna untuk mendekati dan memeluknya. Terdapat juga sistem penderiaan tersuai dalam badannya yang dipanggil HiggieChest, yang mengandungi penderia tekanan udara dan penguat mikrofon.
Ringkasnya, Ini boleh menghantar sentuhan pelukan pengguna dengan cepat ke seluruh badan robot, menjadikannya lebih mudah untuk membuat respons interaktif dengan cepat.
Pada masa yang sama, untuk membolehkan robot melaraskan pergerakannya mengikut jenis badan manusia yang berbeza dan untuk mengelakkan lengan logamnya daripada mencederakan pengguna yang datang untuk memeluk mereka, lengan robot ditetapkan untuk menjadi sangat sensitif dan menarik.

Pertama sekali, setiap tork sendi pada lengan robot mempunyai ambang maksimum, dan apabila ia melebihi, ia akan berhenti bergerak; lengan ini sangat fleksibel dan sensitif, dan pengguna boleh memecahkannya dengan mudah, dan apabila mereka mahu untuk menamatkan pelukan, putuskan mereka Hanya putuskan dan terus hantar isyarat "pelukan yang cukup" kepada robot.
Selain pelukan, orang ramai mula mengharapkan lebih daripada robot
Block mengumpul sejumlah 512 data pelukan daripada 32 pengguna dalam percubaan dan menemui fenomena menarik.
Untuk memastikan ketepatan pengumpulan data, pasukan penyelidik secara khusus mengarahkan subjek hanya melakukan satu tindakan dalam satu pelukan, seperti mengusap, memicit, dsb.
Tetapi melalui video makmal, mereka mendapati 7 daripada 32 peserta itu secara tidak sedar menggabungkan pelbagai gerak isyarat, ada yang menggabungkan menggosok dan mengetuk, dan beberapa orang selepas memeluk robot itu dengan erat Dia melepaskan sedikit dan menepuk bahu robot itu.
Nampaknya selain pelukan ringkas, orang ramai secara beransur-ansur menunjukkan lebih banyak jangkaan emosi pada robot.
Dalam maklum balas pengguna, Block juga terkejut apabila mendapati : Berbanding dengan "sudut dan proses pelukan sempurna" yang diprogramkan, pengguna sebenarnya lebih suka robot untuk membuat respons "improvisasi" berdasarkan pergerakan mereka.
78.13% daripada peserta berkata bahawa tindak balas seperti ini akan membuatkan mereka merasakan robot itu lebih bertenaga dan nyata, dan mereka akan berasa difahami oleh pihak lain. Walaupun maklum balas gerakan semasa telah lengkap, ia terlalu mekanikal dan tidak membuatkan orang merasakan pelaburan emosi yang sama dalam robot dan manusia.
Jadi, dalam versi terkini - HuggieBot 3.0, pasukan telah menyediakan keupayaan untuk robot memberikan "tindak balas pasif" dan "tindak balas aktif".

Ringkasnya, jika robot mengesan bahawa pengguna menepuk, memicit atau menggosok selain mengekalkan postur memeluk, robot akan bertindak balas dengan cara yang berbeza berdasarkan kebarangkalian.
Robot boleh mengulangi gerak isyarat ini dengan sabar, sama ada serentak atau beberapa kali berturut-turut. Bukankah ini lebih baik daripada ramai orang sebenar?
Tetapi jika orang hanya memeluk satu sama lain untuk masa yang lama tanpa melakukan apa-apa tindakan lain, robot akan mencetuskan "tindak balas aktif", dan selang masa adalah kira-kira 1.5 saat.
Jadi, pelukan nampak mudah, tetapi sukar untuk dilepaskan. Interaksi juga perlu dikawal dengan baik.
Setakat ini, selama bertahun-tahun penyelidikan kuantitatif, pasukan Bullock juga telah meringkaskan satu set "menerima standard emas":
- Lembut;
- Dengan suhu;
- Saiz badan adalah serupa dengan saiz orang dewasa; Sensitif mengesan orang yang menghampiri, membuat jemputan dan tindakan memeluk harus disegerakkan dengan orang itu
- Laraskan kedudukan lengan anda secara proaktif untuk membuatkan orang yang dipeluk berasa selesa
- Segera rasakan keinginan orang lain yang telah dilepaskan semasa pelukan
- Perhatikan gerak isyarat semasa pelukan
- Balas dengan pantas kepada gerak isyarat ini
- Setiap respons perlu sedikit berbeza;
- Semasa proses berpelukan, anda sekali-sekala perlu mengambil inisiatif dan membuat beberapa gerak isyarat untuk menyatakan kebimbangan.
- Tanya diri anda,
Pada masa ini, pasukan Bullock sedang giat membangunkan robot pelukan generasi keempat Walaupun anda tidak dapat membeli robot untuk menyembuhkan diri anda pada masa ini, anda boleh
belajar menggunakannya dahulu. Melihat dengan cara ini, keikhlasan sentiasa perlu dimenangi.
Kita tidak memerlukan "pelukan yang sempurna", yang kita perlukan adalah "pelukan yang ikhlas".Telur Paskah
Untuk mengelakkan sesetengah pengguna daripada terlalu terlibat dan menggunakan terlalu banyak kekerasan, saintis turut memberikan robot itu badan baharu:
Dengan pengedap haba di sepanjang tepi dan kemudian menggunakan simen vinil HH-66 di atas pengedap haba, ia lebih kuat dan lebih tahan tekanan.
Disebabkan seseorang memegang saya terlalu erat sebelum ini, robot itu bocor udara!
Rujukan
[2] Bolehkah Robot Memberi Pelukan Baik? |.
[3] HuggieBot 3.0 – Robot Menggunakan Sains untuk Menyampaikan Pelukan Sempurna https://www.odditycentral.com/technology/huggiebot-3-0-robot-uses-science-to-deliver-the-perfect-hug .htmlPengarang: Lilyann
Editor: biu
Melainkan dinyatakan sebaliknya, gambar adalah daripada rujukan [1] dan tangkapan skrin video dilampirkan
Jika perlu, sila hubungi sns@guokr.com
Atas ialah kandungan terperinci Apabila tiada orang sebenar boleh memberi anda pelukan sepenuh hati, robot akan mengambil tindakan. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 10 Generasi GPT-4O Generasi Mendapatkan Untuk Mencuba Hari Ini!Apr 24, 2025 am 10:26 AM
10 Generasi GPT-4O Generasi Mendapatkan Untuk Mencuba Hari Ini!Apr 24, 2025 am 10:26 AMBarang -barang liar yang benar -benar berlaku di dunia AI. Generasi imej asli Openai adalah gila sekarang. Kami bercakap visual rahang-menjatuhkan, terperinci yang menakutkan, dan output sehingga digilap mereka merasa buatan tangan dengan penuh
 Panduan pada pengekodan getaran dengan windsurfApr 24, 2025 am 10:25 AM
Panduan pada pengekodan getaran dengan windsurfApr 24, 2025 am 10:25 AMDengan mudah membawa penglihatan pengekodan anda ke kehidupan dengan Windsurf Codeium, teman pengekodan berkuasa AI anda. Windsurf menyelaraskan keseluruhan kitaran hayat pembangunan perisian, dari pengekodan dan debugging ke pengoptimuman, mengubah proses menjadi intu
 Meneroka Penyingkiran Latar Belakang Imej Menggunakan RMGB v2.0Apr 24, 2025 am 10:20 AM
Meneroka Penyingkiran Latar Belakang Imej Menggunakan RMGB v2.0Apr 24, 2025 am 10:20 AMBraiai's RMGB v2.0: Model penyingkiran latar belakang sumber terbuka yang kuat Model segmentasi imej merevolusi pelbagai bidang, dan penyingkiran latar belakang adalah bidang utama kemajuan. Braiai's RMGB v2.0 menonjol sebagai misal yang canggih, sumber terbuka m
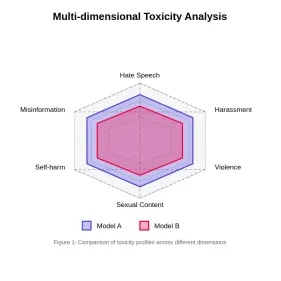 Menilai ketoksikan dalam model bahasa yang besarApr 24, 2025 am 10:14 AM
Menilai ketoksikan dalam model bahasa yang besarApr 24, 2025 am 10:14 AMArtikel ini menerangkan isu ketoksikan penting dalam model bahasa besar (LLMS) dan kaedah yang digunakan untuk menilai dan mengurangkannya. LLMS, Menghancurkan pelbagai aplikasi dari chatbots ke penjanaan kandungan, memerlukan metrik penilaian yang mantap, kecerdasan
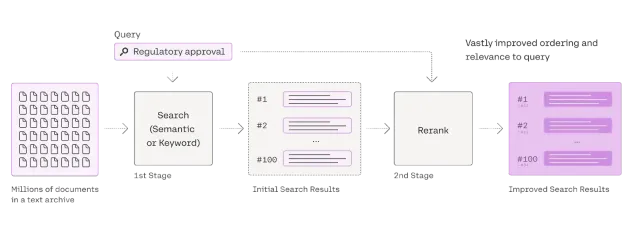 Panduan Komprehensif mengenai Reranker Untuk RagApr 24, 2025 am 10:10 AM
Panduan Komprehensif mengenai Reranker Untuk RagApr 24, 2025 am 10:10 AMSistem Generasi Tambahan (RAG) Pengambilan semula mengubah akses maklumat, tetapi keberkesanannya bergantung kepada kualiti data yang diambil. Di sinilah peniaga menjadi penting - bertindak sebagai penapis kualiti untuk hasil carian untuk memastikan sahaja
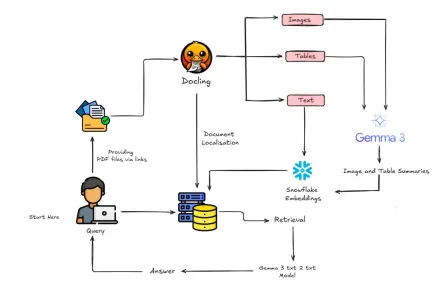 Bagaimana Membina Rag Multimodal Dengan Gemma 3 & Docling?Apr 24, 2025 am 10:04 AM
Bagaimana Membina Rag Multimodal Dengan Gemma 3 & Docling?Apr 24, 2025 am 10:04 AMTutorial ini membimbing anda melalui membina saluran paip generasi pengambilan semula multimodal (RAG) yang canggih di Google Colab. Kami akan menggunakan alat canggih seperti Gemma 3 (untuk bahasa dan penglihatan), docling (penukaran dokumen), Langchain
 Panduan Ray untuk Aplikasi Pembelajaran AI dan Mesin Skala dan MesinApr 24, 2025 am 10:01 AM
Panduan Ray untuk Aplikasi Pembelajaran AI dan Mesin Skala dan MesinApr 24, 2025 am 10:01 AMRay: Rangka kerja yang kuat untuk mengukur aplikasi AI dan Python Ray adalah rangka kerja sumber terbuka revolusioner yang direka untuk menggunakan aplikasi AI dan Python dengan mudah. API intuitifnya membolehkan penyelidik dan pemaju untuk memindahkan kod mereka
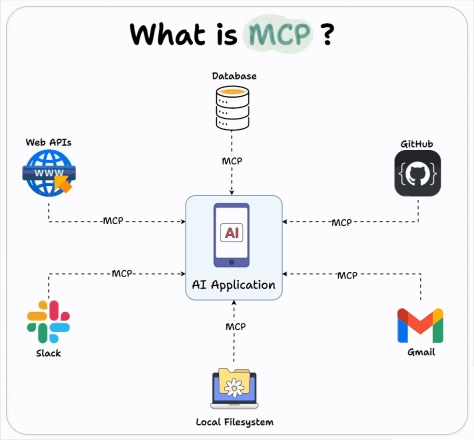 Bagaimana menggunakan integrasi OpenAI MCP untuk ejen bangunan?Apr 24, 2025 am 09:58 AM
Bagaimana menggunakan integrasi OpenAI MCP untuk ejen bangunan?Apr 24, 2025 am 09:58 AMOpenAI merangkumi interoperabilitas dengan menyokong Protokol Konteks Model Anthropic (MCP), standard sumber terbuka memudahkan penolong integrasi AI dengan sistem data yang pelbagai. Kerjasama ini memupuk rangka kerja bersatu untuk aplikasi AI ke EFF


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

Video Face Swap
Tukar muka dalam mana-mana video dengan mudah menggunakan alat tukar muka AI percuma kami!

Artikel Panas
Alat panas

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

SublimeText3 versi Inggeris
Disyorkan: Versi Win, menyokong gesaan kod!

SublimeText3 Linux versi baharu
SublimeText3 Linux versi terkini

Versi Mac WebStorm
Alat pembangunan JavaScript yang berguna

mPDF
mPDF ialah perpustakaan PHP yang boleh menjana fail PDF daripada HTML yang dikodkan UTF-8. Pengarang asal, Ian Back, menulis mPDF untuk mengeluarkan fail PDF "dengan cepat" dari tapak webnya dan mengendalikan bahasa yang berbeza. Ia lebih perlahan dan menghasilkan fail yang lebih besar apabila menggunakan fon Unicode daripada skrip asal seperti HTML2FPDF, tetapi menyokong gaya CSS dsb. dan mempunyai banyak peningkatan. Menyokong hampir semua bahasa, termasuk RTL (Arab dan Ibrani) dan CJK (Cina, Jepun dan Korea). Menyokong elemen peringkat blok bersarang (seperti P, DIV),

