
Rumah >Peranti teknologi >AI >Penyelidik membangunkan robot yang boleh memahami arahan bahasa Inggeris dan melakukan kerja rumah
Penyelidik membangunkan robot yang boleh memahami arahan bahasa Inggeris dan melakukan kerja rumah

- 王林ke hadapan
- 2023-05-16 13:13:141328semak imbas
Pasukan penyelidik dari Universiti Princeton, Universiti Stanford dan Google menggunakan model GPT-3 Davinci OpenAI untuk membangunkan robot bernama TidyBot yang boleh memahami arahan bahasa Inggeris dan melakukan kerja rumah. Robot ini secara automatik boleh menyelesaikan tugas seperti menyusun pakaian, mengutip sampah di atas lantai, dan mengutip mainan mengikut pilihan pengguna.
Model GPT-3 Davinci ialah model pembelajaran mendalam, sebahagian daripada keluarga model GPT, yang boleh memahami dan menjana bahasa semula jadi. Model ini mempunyai keupayaan ringkasan yang berkuasa dan boleh mempelajari atribut dan perhubungan objek kompleks daripada sejumlah besar data teks. Para penyelidik menggunakan keupayaan ini untuk membolehkan robot meletakkan objek berdasarkan beberapa objek contoh yang disediakan oleh pengguna, seperti "baju kuning di dalam laci, baju ungu tua di dalam almari, stokin putih di dalam laci," dan kemudian biarkan model membuat kesimpulan. Peraturan keutamaan umum pengguna dan gunakannya pada interaksi masa hadapan.
Para penyelidik menulis dalam kertas itu: "Pandangan asas kami ialah keupayaan ringkasan LLM (Model Bahasa Besar) adalah padanan yang baik untuk keperluan generalisasi robot diperibadikan. LLM menunjukkan keupayaan untuk mencapai generalisasi melalui ringkasan Keupayaan menakjubkan untuk mengeksploitasi sifat objek kompleks dan hubungan yang dipelajari daripada set data teks besar-besaran."
Mereka juga menulis: "Tidak seperti kaedah tradisional yang memerlukan pengumpulan data dan latihan model yang mahal, kami menunjukkan bahawa LLM boleh Mencapai generalisasi dalam robotik secara langsung di luar kotak, memanfaatkan keupayaan ringkasan hebat yang mereka pelajari daripada sejumlah besar data teks ”
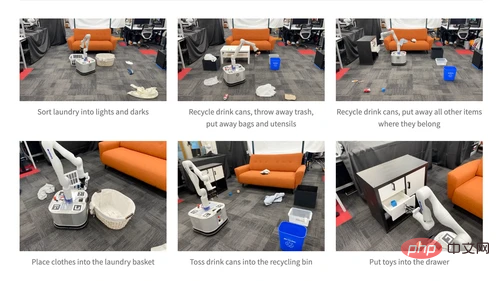
Para penyelidik menunjukkan robot di tapak web kertas yang boleh mengasingkan kepada warna terang dan gelap, mengitar semula tin minuman , buang sampah, kemas beg dan kutleri, letak semula barang yang bertaburan di tempatnya dan letakkan mainan di dalam laci.
Penyelidik mula-mula menguji set data penanda aras berasaskan teks di mana pilihan pengguna dimasukkan dan model diminta membuat peraturan pemperibadian untuk menentukan atribusi item. Model meringkaskan contoh ke dalam peraturan am dan menggunakan ringkasan untuk menentukan tempat untuk meletakkan item baharu. Adegan garis dasar ditakrifkan dalam empat bilik dengan 24 adegan dalam setiap bilik. Setiap adegan mengandungi antara dua dan lima tempat untuk meletakkan objek, dan terdapat bilangan objek yang dilihat dan tidak kelihatan yang sama untuk model untuk dikelaskan. Ujian itu mencapai ketepatan 91.2 peratus pada item yang tidak kelihatan, tulis mereka.
Apabila mereka menggunakan pendekatan ini pada robot dunia sebenar, TidyBot, mereka mendapati bahawa ia berjaya mengambil 85% objek. TidyBot telah diuji dalam lapan senario dunia sebenar, setiap satu dengan satu set sepuluh objek, dan robot itu dijalankan tiga kali dalam setiap senario. Menurut IT House, sebagai tambahan kepada LLM, TidyBot juga menggunakan pengelas imej yang dipanggil CLIP dan pengesan objek yang dipanggil OWL-ViT.
Danfei Xu, penolong profesor di Sekolah Pengkomputeran Interaktif Institut Teknologi Georgia, berkata apabila bercakap tentang model PaLM-E Google bahawa LLM memberikan robot lebih banyak keupayaan menyelesaikan masalah. "Kebanyakan sistem perancangan misi sebelum ini bergantung pada beberapa bentuk algoritma carian atau pengoptimuman, yang kurang fleksibel dan sukar untuk dibina. LLM dan LLM multimodal membolehkan sistem ini mendapat manfaat daripada data berskala Internet dan mudah digunakan untuk menyelesaikan masalah baharu," katanya .
Atas ialah kandungan terperinci Penyelidik membangunkan robot yang boleh memahami arahan bahasa Inggeris dan melakukan kerja rumah. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI