
Rumah >Peranti teknologi >AI >Ketahui seni bina perisian pengawal domain pemanduan pintar dalam satu artikel
Ketahui seni bina perisian pengawal domain pemanduan pintar dalam satu artikel

- 王林ke hadapan
- 2023-05-14 19:22:041261semak imbas
Pemanduan pintar memerlukan orang dari pelbagai jurusan untuk bekerjasama, dan bukan semua orang mempunyai latar belakang perisian atau perisian automotif. Untuk membolehkan orang yang mempunyai latar belakang yang berbeza memahami kandungan artikel pada tahap tertentu, artikel ini cuba menggunakan bahasa yang sangat popular untuk menerangkannya, dan menggambarkannya dengan pelbagai gambar. Artikel ini mengelakkan penggunaan istilah yang samar-samar, dan semua istilah diberikan takrifan yang tepat pada kali pertama ia muncul.
Kepentingan seni bina perisian pemanduan pintar
Model konseptual pemanduan pintar yang dipermudah
Pintar Model konsep pemanduan hanya menyelesaikan tiga soalan teras:
1.
2. Ke mana saya hendak pergi?
3. Bagaimana saya boleh sampai ke sana?
Persoalan pertama "Di manakah saya?" Apa yang perlu diselesaikan ialah masalah "persepsi persekitaran" dan "posisi". kereta itu sendiri dan persekitaran statik yang mengelilingi (jalan raya, tanda lalu lintas, lampu isyarat, dll.) dan persekitaran dinamik (kereta, orang, dll.). Ini telah mencetuskan satu siri penyelesaian teknikal pengesanan dan kedudukan, termasuk pelbagai penderia dan sistem algoritma.
Soalan kedua "Ke mana saya hendak pergi?" Daripada ini, beberapa istilah seperti "perancangan global", "perancangan tempatan", "perancangan tugas", "perancangan laluan", "perancangan tingkah laku", "pembuatan keputusan tingkah laku", "perancangan pergerakan", dsb kepada kekaburan linguistik, beberapa istilah ini ialah Cara yang berbeza untuk menyebut makna yang sama, sesetengah daripadanya selalunya mempunyai makna yang serupa tetapi sedikit berbeza pada masa yang berbeza.
Selain daripada istilah khusus, secara amnya, masalah "merancang membuat keputusan" akan dipecahkan kepada tiga bahagian:
1 . Perancangan dalam erti kata global dalam julat tertentu (istilah biasa: perancangan global, perancangan laluan, perancangan tugas)
2 Terma: perancangan tingkah laku, pembuatan keputusan tingkah laku)
3. Perancangan lanjut untuk setiap peringkat (istilah biasa: perancangan tempatan, perancangan gerakan)
Untuk pelbagai rancangan ini, banyak sistem algoritma untuk menyelesaikan masalah telah diperolehi.
Soalan ketiga "Bagaimana saya harus sampai ke sana?" secara amnya merujuk kepada "mengawal pelaksanaan", iaitu, pelaksanaan sebenar pelan terkecil untuk mencapai tujuan rancangan. Khususnya di dalam kereta, ia sering ditunjukkan dalam pelbagai algoritma kawalan, dan teori kawalan menyelesaikan masalah ini.
Oleh kerana penyelesaian kepada ketiga-tiga masalah ini adalah semua masalah algoritma dalam analisis akhir, jadi dalam satu erti kata, teras pemanduan autonomi ialah algoritma. Dari satu segi, seni bina perisian mesti dapat membawa algoritma ini. Tanpa sistem pembawa yang baik, tidak kira betapa baik algoritma itu, ia akan menjadi sia-sia.
Ciri-ciri rekursif fraktal model konseptual asas
Demi kemudahan, kami mewakili tiga masalah model konsep asas sebagai E , P, X masing-masing , masing-masing mewakili persekitaran (Persekitaran), pelan (Pelan), dan pelaksanaan (eXecute). Setiap set E-P-X mempunyai ruang masalah deskriptifnya.
Sebagai contoh, jika kita mentakrifkan ruang masalah A sebagai "memandu dari Beijing ke Guangzhou", maka untuk masalah E: kedudukannya mungkin tertumpu pada daerah semasa di Beijing, dan tiada perlu memperhalusinya ke jalanan. Kita juga perlu mengambil berat sama ada terdapat ribut petir dan maklumat struktur jalan di atas lebuh raya wilayah. Untuk soalan P:
P-1: Langkah pertama ialah mereka bentuk laluan global, lebuh raya mana, lebuh raya kebangsaan dan lebuh raya wilayah untuk diambil
P-2: Rancang satu siri tindakan berdasarkan laluan global, termasuk persimpangan lebuh raya mana yang hendak dituju dahulu, berapa kilometer untuk dipandu, pergi ke kawasan perkhidmatan untuk mengisi minyak, menukar ke jalan lain, dsb.
P-3: Rancang laluan jalan khusus ke setiap bahagian. Contohnya, sama ada untuk mengambil jalan lingkaran ketiga atau jalan lingkaran keempat ke persimpangan lebuh raya, jalan mana yang hendak ditukar ke
X mesti melaksanakan setiap langkah yang dirancang oleh P.
Jika kita mentakrifkan ruang masalah B sebagai "memandu dengan selamat melalui persimpangan", maka untuk masalah E, kita harus memberi perhatian kepada maklumat jalan semasa, maklumat lampu isyarat, keadaan kenderaan di jalan raya, keadaan pejalan kaki, dsb. . Untuk masalah P:
P-1: Langkah pertama ialah merancang laluan selamat melalui persimpangan, termasuk merancang lorong mana untuk sampai ke persimpangan semasa mengikut peraturan lalu lintas dan maklumat jalan raya, dan memasuki persimpangan sasaran lorong mana.
P-2: Langkah kedua ialah merancang satu siri urutan tindakan berdasarkan hasil akar langkah pertama, seperti memperlahankan terlebih dahulu, menukar lorong sasaran, berhenti dan menunggu lampu merah, mula memecut, melepasi simpang.
P-3: Langkah ketiga ialah mereka bentuk trajektori khusus untuk setiap tindakan dalam langkah kedua. Trajektori mesti dapat mengelakkan halangan seperti pejalan kaki dan kenderaan.
X bertanggungjawab untuk melaksanakan output masalah P.
Ruang masalah B ini adalah yang paling hampir dengan masalah untuk diselesaikan oleh algoritma perancangan biasa. Langkah pertama P-1 sering dipanggil "perancangan global" atau "perancangan tugas", P-2 sering dipanggil "perancangan tingkah laku" atau "pembuat keputusan tingkah laku", dan P-3 dipanggil "perancangan tempatan" atau " perancangan tingkah laku". Rancangan Gerakan”. Seperti yang ditunjukkan dalam rajah di bawah, E-P-X membentuk model konseptual asas abstrak, dan ruang masalah A dan B adalah pelaksanaan khususnya dalam skop tertentu.
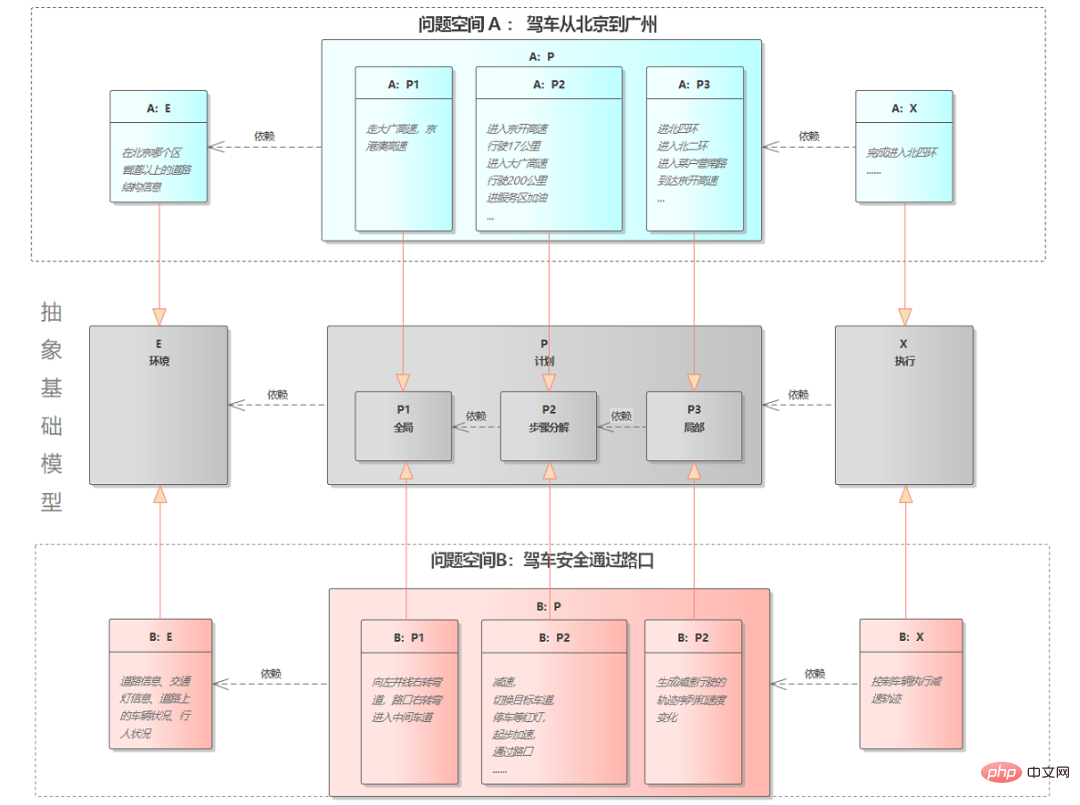
Rajah 1 Dua ruang masalah EPX
A dan B Kedua-dua masalah ruang mempunyai struktur E-P-X yang serupa, tetapi masalah yang mereka selesaikan menjangkau masa dan ruang yang sangat berbeza. Dalam gambar di atas, tugasan yang A: Jadi sebenarnya, seperti yang ditunjukkan dalam rajah di bawah, model E-P-X ialah struktur rekursif fraktal.
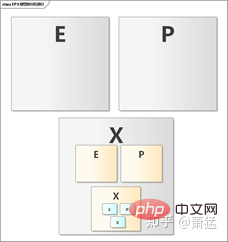
Rajah 2 Struktur rekursif Fraktal EPX
Tahap X sebelumnya boleh sentiasa diuraikan menjadi E-P-X berbutir lebih kecil sekali lagi oleh peringkat seterusnya untuk pelaksanaan.
"Fraktal" juga dipanggil "fraktal serupa diri". Pemahaman popularnya ialah bahagian sesuatu mempunyai struktur yang serupa dengan keseluruhannya, iaitu simetri pada skala yang berbeza, seperti Sebatang dahan pokok mempunyai struktur yang serupa dengan keseluruhan pokok, dan tambahan pula, urat batang setiap daun juga mempunyai struktur yang serupa. Rajah di bawah menyenaraikan beberapa struktur fraktal biasa.
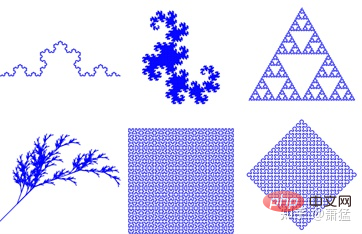
Contoh Fraktal Rajah 3
6 grafik ini mempunyai Ciri, mana-mana bahagian setiap rajah mempunyai struktur yang sama dengan keseluruhan rajah. Jika anda mengezum lebih jauh pada kawasan tempatan, anda akan mendapati bahawa kawasan tempatan mempunyai struktur yang sama. Oleh itu, apabila kita mempunyai satu set logik pemprosesan perniagaan yang boleh digunakan untuk keseluruhan, ia juga boleh digunakan untuk bahagian. Sama seperti penanaman beberapa pokok, anda boleh mengambil dahan dan menanamnya, dan ia akan tumbuh menjadi pokok baru. Ungkapan yang dipetakan kepada program perisian ialah "rekursi". Ini tidak bermakna menggunakan fungsi rekursif, tetapi rekursi peringkat seni bina.
Ungkapan "fraktal" yang lebih akademik ialah "penggunaan perspektif dimensi pecahan dan kaedah matematik untuk menerangkan dan mengkaji perkara objektif, melompat keluar dari garisan satu dimensi, permukaan dua dimensi , dan tiga dimensi Halangan tradisional ruang masa tiga dimensi dan juga empat dimensi adalah lebih dekat dengan perihalan sifat dan keadaan sebenar sistem kompleks, dan lebih sejajar dengan kepelbagaian dan kerumitan perkara objektif." Apabila kita menemui ungkapan matematik yang sesuai untuk "realiti fizikal" dan kemudian menukarnya menjadi "realiti program", kita boleh menemui kaedah seni bina perisian dan pelaksanaan yang lebih ringkas, jelas dan tepat.
Seni bina perisian menyelesaikan pemetaan "realiti fizikal" kepada "realiti program"
E-P-X ialah struktur yang diabstraksikan daripada "realiti fizikal". Dan kebanyakannya adalah pelbagai jenis kerja algoritma. Penyelidikan dan pembangunan algoritma individu itu sendiri boleh dijalankan secara bebas berdasarkan keadaan input dan output yang telah ditetapkan. Tetapi bagaimana untuk menggabungkan algoritma, mencetuskannya dengan betul pada masa yang tepat, dan menggunakan keputusan secara munasabah untuk akhirnya membentuk fungsi dengan penggunaan praktikal. Teras jambatan ini daripada "realiti fizikal" kepada "realiti program" adalah seni bina perisian.
Sistem pemanduan autonomi bermula dari Tahap 1 hingga Tahap 5. Semakin tinggi, semakin dalam model E-P-X yang disebutkan di atas bersarang. Seni bina perisian menjadi lebih sukar. Kebanyakan fungsi Level1 dan Level2 tunggal memerlukan hanya satu lapisan model E-P-X. Ambil AEB (brek kecemasan automatik) sebagai contoh:
Bahagian E (persepsi): terutamanya pengecaman statik dan pengelasan sasaran di hadapan (kereta, orang), pengesanan dinamik, jarak pengesanan dan kelajuan .
Bahagian P: Kerana AEB hanya melakukan kawalan membujur, semuanya boleh direalisasikan melalui kawalan kelajuan. Jadi hanya merancang untuk kelajuan dalam tempoh masa.
X Bahagian: Kendalikan perancangan kelajuan kepada unit kawalan kenderaan untuk pelaksanaan.
Ia tidak bermakna dengan hanya satu lapisan EPX, fungsi AEB adalah mudah. Sebenarnya, sangat sukar untuk melaksanakan fungsi AEB yang boleh dihasilkan secara besar-besaran. Walau bagaimanapun, EPX peringkat pertama tidak perlu dijadualkan berdasarkan senario Ia hanya perlu memberi tumpuan kepada pelaksanaan EPX dalam satu senario, dan seni bina perisiannya agak mudah. Bab 2 akan memperkenalkan seni bina perisian biasa bagi fungsi L2.
Apakah itu penjadualan berasaskan adegan?
Walaupun dalam gelung EPX pada tahap butiran terkecil, tiada satu pelaksanaan EXP dapat menyelesaikan semua masalah pada tahap ini.
Contohnya: untuk kes penggunaan pemanduan garis lurus yang ringkas, kami boleh melaksanakan unit X hujung sebagai algoritma kawalan kenderaan Algoritma ini mengendalikan semua senario jalan rata, menanjak dan menurun. . Anda juga boleh menggunakan unit penjadualan (S) untuk mengenal pasti jalan rata, cerun menanjak dan cerun menurun sebagai senario berbeza berdasarkan maklumat unit E dan bertukar kepada kitaran EXP peringkat seterusnya yang berbeza. Setiap gelung EXP peringkat seterusnya melaksanakan satu adegan. Malah, walaupun algoritma kawalan unit X digunakan untuk menyelesaikan semua senario jalan rata, menanjak dan menurun, algoritma masih akan membezakan senario ini secara dalaman Malah, ia masih gelung EXP berbutir kecil.
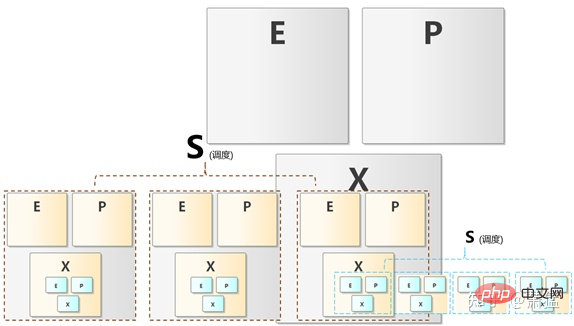
Rajah 4 penjadualan EPX
Seperti yang ditunjukkan dalam Rajah 4, Scene penjadualan (S) boleh dilakukan pada setiap peringkat, yang bermaksud bahawa definisi "senario" juga mempunyai pembahagian berbutir. Oleh itu, model EPX hendaklah model EPX-S. Tiada bahagian S yang jelas di bawah L2.
Bagaimana untuk serasi dengan L1 hingga L3+ dari segi seni bina perisian, tempat letak kereta mendatar, tempat letak kereta pepenjuru, dll. semuanya adalah senario yang berbeza, dan bahagian P dan X perlu dilaksanakan secara berasingan. Walau bagaimanapun, penjadualan adegan boleh dipilih secara manual melalui antara muka HMI, yang merupakan unit S "manusia-dalam-gelung".
Tahap 3 Antara fungsi di atas, campur tangan manual tidak diperlukan untuk tempoh pemanduan berterusan yang lama. Ia pasti akan melibatkan penjadualan automatik berbilang tahap EXP yang berbeza. Dengan cara ini, seni bina perisian adalah sangat berbeza daripada fungsi di bawah L2. Ini adalah salah satu sebab mengapa banyak syarikat membahagikan L2 dan L3+ kepada dua pasukan yang berbeza.
Malah, selagi seni bina perisian direka secara sedar berdasarkan model EXP-S berbilang peringkat, setiap unit EXP-S mempunyai penjelmaan yang sesuai, dan ia sebenarnya boleh dicapai Satu set seni bina perisian menyokong pemanduan autonomi asas dari L1 hingga L3+ dan ke atas. Cuma unit S lebih lemah untuk fungsi di bawah L2, tetapi status seni binanya masih wujud.
Seni bina perisian L2 dan di bawah pengawal satu fungsi
Mari kita lihat seni bina perisian biasa bagi fungsi L2 🎜>
Penyelesaian AEB/ACC/LKA menggunakan Sensor Pintar
Tiga fungsi AEB/ACC/LKA ialah fungsi bantuan pemanduan paling klasik bagi L2, penyelesaian sistem umum Bahagian persepsi kebanyakannya menggunakan kamera menghadap ke hadapan untuk mengeluarkan maklumat sasaran (kenderaan, pejalan kaki), dan menggabungkannya dengan data sasaran yang diberikan oleh radar gelombang milimeter menghadap ke hadapan untuk mendapatkan kelajuan dan jarak yang lebih tepat. Persepsi visual dan persepsi radar kebanyakannya menggunakan penyelesaian Sensor Pintar, jadi Tahap 1 boleh memilih produk daripada pembekal Tahap 2 yang matang. Kerja pembangunan utama Tahap 1 adalah pada pelaksanaan gabungan persepsi dan mesin keadaan berfungsi dan algoritma kawalan kenderaan.
Seni bina perkakasan yang biasa digunakan
Pilihan 1: Hasil persepsi visual dipindahkan ke pengawal persepsi radar, dan gabungan persepsi dan mesin keadaan berfungsi L2 dilengkapkan dalam pengawal persepsi radar
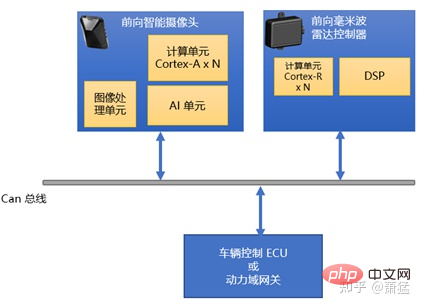
Rajah 5 Pilihan 1 topologi
Pilihan 2: Pengawal L2 bebas Sensor Pintar menghubungkan penglihatan dan radar, pengawal L2 melengkapkan gabungan persepsi dan mesin keadaan berfungsi L2
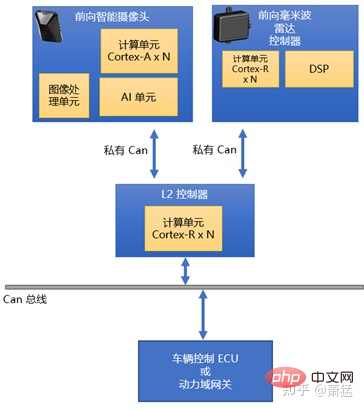
Rajah 6 Skim 2 topologi
Kedua-dua penyelesaian sering digunakan. Penyelesaian 1 menggunakan pengawal radar berprestasi tinggi dan memperuntukkan beberapa unit pengkomputeran untuk melaksanakan algoritma gabungan dan mesin keadaan berfungsi. Banyak pengeluar cip mengambil bahagian kuasa pengkomputeran ini sebagai pertimbangan semasa mereka bentuk cip pemprosesan radar. Sebagai contoh, siri S32R NXP direka khas untuk ECU radarnya cukup untuk melaksanakan pemprosesan isyarat radar dan pelaksanaan fungsi L2 pada masa yang sama. Lagipun, algoritma visual yang paling intensif secara pengiraan diselesaikan pada peranti lain.
Pilihan 2 memisahkan L2 untuk melaksanakan pengawal fungsi L2, dan berkomunikasi dengan dua Penderia Pintar melalui Can peribadi untuk mendapatkan data pengesan. Secara umumnya, penyelesaian ini boleh mempertimbangkan untuk menambah lebih banyak fungsi L2 pada masa hadapan, dan jika perlu, anda boleh menyambungkan lebih banyak Penderia Pintar.
Seni bina perisian tipikal
Untuk seni bina sistem menggunakan Smart Sensor, kamera pintar yang menghadap ke hadapan dan radar gelombang milimeter yang menghadap ke hadapan masing-masing menyediakan persekitaran yang diperhatikan masing-masing. Semantik objek sasaran dalam. Kedua-dua bahagian data ini dipindahkan terus ke modul yang bertanggungjawab untuk gabungan persepsi dan pelaksanaan fungsi L2 melalui bas Can atau mekanisme dalaman IPC (komunikasi antara proses OS komputer).
Sama ada penyelesaian perkakasan satu atau penyelesaian dua, seni bina perisian yang paling biasa digunakan dalam industri dibangunkan berdasarkan AutoSar Klasik. AutoSar Klasik menyediakan fungsi biasa untuk ECU kenderaan dan menyediakan persekitaran pelaksanaan serta saluran input dan output data untuk perisian rujukan. Modul gabungan persepsi dan fungsi ACC/AEB/LKA lain boleh dilaksanakan sebagai satu atau lebih AutoSar SWC (komponen perisian). Setiap pembangun mempunyai logik munasabah sendiri sama ada dan bagaimana untuk memisahkan komponen SWC ini. Tetapi seni bina asas adalah sama.
Sudah tentu, anda tidak boleh menggunakan AutoSar Klasik dan menggunakan RTOS lain yang sesuai sebagai sistem asas Mungkin lebih sukar untuk membangunkan fungsi umum dan memenuhi piawaian keselamatan berfungsi untuk ECU kenderaan, tetapi dalam Seni bina pembangunan fungsi aplikasi tidak jauh berbeza daripada penyelesaian menggunakan AutoSar Klasik.
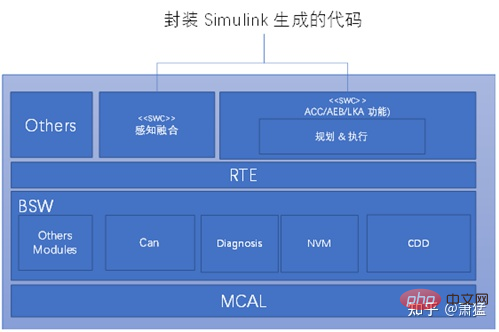
Rajah 7 Seni bina perisian tipikal ACC/AEB/LKA
Kaedah pembangunan MBD
Kaedah MBD (pembangunan berasaskan model) biasanya digunakan dalam industri untuk melaksanakan algoritma gabungan persepsi, algoritma pelaksanaan perancangan dan kawalan serta ACC/ Mesin status berfungsi AEB/LKA. Kemudian gunakan alat untuk menjana kod C dan menyepadukannya secara manual ke dalam platform sasaran. Salah satu kemudahan kaedah pembangunan MDB ialah anda boleh menggunakan alat dan peralatan model seperti CanOE untuk membangunkan dan menyahpepijat secara terus pada kenderaan, atau menyambung ke platform simulasi untuk pembangunan dan penyahpepijatan. Dengan cara ini, pasukan pembangunan boleh dibahagikan kepada dua bahagian, satu bahagian menggunakan alat model untuk membangunkan fungsi aplikasi, dan bahagian lain membangunkan satu siri tugas yang membosankan yang diperlukan oleh semua ECU kenderaan, dan kemudian mengintegrasikannya bersama-sama.
Penyelesaian produk bersepadu yang lebih tinggi
Secara amnya, produk tempat letak kereta automatik sepenuhnya akan menggunakan penyelesaian yang lebih bersepadu, menyepadukan algoritma penglihatan (pengiktirafan Halangan statik, pengecaman halangan dinamik, pengecaman pejalan kaki, pengecaman talian ruang letak kereta) algoritma radar ultrasonik (pengesanan jarak, pengesanan halangan) perancangan trajektori dan pelaksanaan kawalan proses letak kereta semuanya disiapkan dalam satu pengawal. Tahap penyepaduan yang lebih tinggi juga akan menyokong fungsi pandangan sekeliling 360 darjah dalam pengawal letak kereta automatik, yang juga memerlukan sokongan untuk pembetulan imej sekeliling kamera dan penyambungan grafik 2D/3D yang menghasilkan output video penjanaan HMI dan fungsi lain.
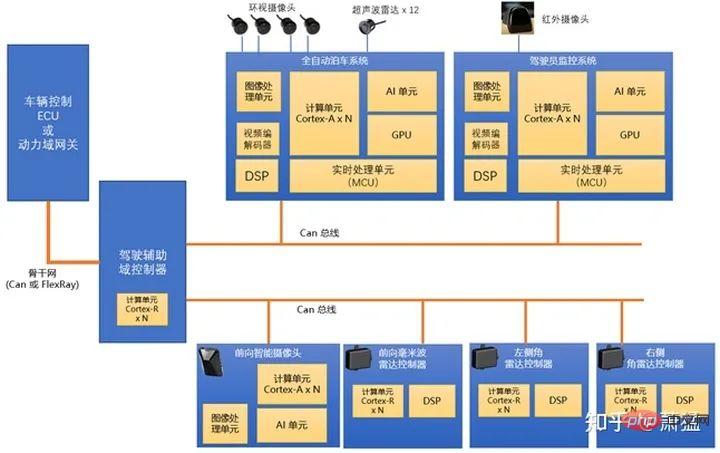
Topologi perkakasan skematik adalah seperti berikut.
Rajah topologi perkakasan
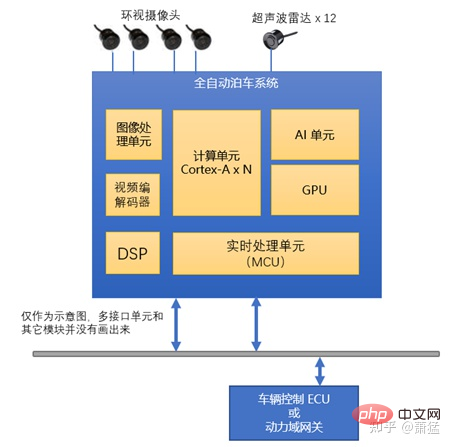
Rajah 8 penyelesaian topologi perkakasan sistem tempat letak kereta
Setiap modul dalam gambar mempunyai mod pengedaran berbeza dalam penyelesaian pemilihan perkakasan yang berbeza. Secara amnya, MCU yang digunakan untuk pemprosesan masa nyata menggunakan cip yang berasingan. Pengeluar cip yang berbeza mempunyai penyelesaian unit AI mereka sendiri. Ada yang menggunakan DSP berprestasi tinggi, ada yang menggunakan unit pengkomputeran matriks proprietari, ada yang menggunakan FPGA, dan sebagainya.
Seni bina perisian tipikal
Gambar di bawah adalah seni bina perisian tipikal sistem letak kereta automatik (ia hanya ilustrasi ringkas, sistem pengeluaran besar-besaran sebenar akan lebih kompleks) :
Berbanding dengan 2.1.1, perubahan paling ketara di sini ialah perbezaan antara "domain masa nyata" dan sistem "domain prestasi". Secara umumnya, kami memanggil sistem perisian dan perkakasan pada MCU atau teras masa nyata lain (Cortex-R, Cortex-M atau siri setara yang lain) sebagai "domain masa nyata". Teras besar dalam SOC (Cortex-A atau siri setara) dan Linux/QNX yang berjalan di atasnya secara kolektif dipanggil domain prestasi, yang secara amnya turut merangkumi sistem perisian dan perkakasan yang menyokong pecutan algoritma visual.
Walaupun dari segi kesukaran kejuruteraan untuk pengeluaran besar-besaran, sistem parkir automatik sepenuhnya adalah jauh lebih kecil daripada fungsi keselamatan aktif Tahap 2 seperti ACC/AEB/LKA. Tetapi dari segi seni bina perisian, sistem tempat letak kereta jauh lebih rumit. Terutamanya dicerminkan dalam aspek berikut:
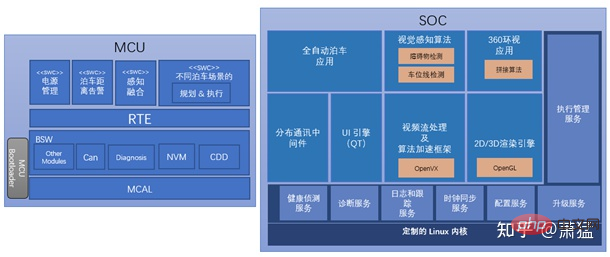
Rajah 9 Seni bina perisian sistem tempat letak kereta
Pembahagian domain masa nyata dan domain prestasi membawa kerumitan sistemik adalah perlu untuk memilih platform perkakasan yang berbeza untuk pengiraan yang berbeza mengikut keperluan masa nyata dan keperluan sumber pengkomputeran
- Selepas OS dalam domain prestasi menggunakan Linux, persekitaran pelaksanaan peringkat OS jauh lebih kompleks daripada RTOS
- Satu siri rangka kerja atau perisian tengah diperlukan untuk menyokong pembangunan aplikasi
- Kerumitan laluan data
- Meningkatkan laluan pemprosesan strim video
- Meningkatkan hubungan antara sebenar -domain masa dan domain prestasi Keperluan laluan data antara
- Terdapat keperluan komunikasi data antara pelbagai modul perisian dalam domain prestasi
- Selepas melaksanakan penyelesaian platform cip khusus, Reka bentuk seni bina perlu disepadukan dan diselaraskan dengan pelbagai SDK cip
Selain itu, melalui seni bina perisian ini, kita dapat melihat bahawa pengenalan Linux (atau QNX/vxworks) membawa beberapa soalan. Sistem ini sendiri adalah sistem pengendalian komputer yang tiada kaitan dengan industri tertentu Apabila digunakan dalam pengawal elektronik automotif, akan ada satu siri fungsi umum yang tiada kaitan dengan fungsi produk tertentu tetapi perlu dilaksanakan sebagai ECU automotif. Seperti diagnostik, penyegerakan jam, naik taraf, dsb. Bahagian ini menyumbang beban kerja yang sangat besar dalam pembangunan pengawal keseluruhan, melebihi 40% dalam banyak kes, dan sangat berkaitan dengan kebolehpercayaan pengawal.
Dalam bidang peralatan komunikasi rangkaian, ini sering dipanggil pesawat pengurusan. Banyak juga keupayaan asas yang disediakan oleh AutoSar AP. Malah, sama ada CP AutoSar atau AP AutoSar, kecuali modul yang bertanggungjawab untuk komunikasi, kebanyakan yang lain adalah keupayaan pesawat pengurusan.
Kerjasama berbilang ECU satu fungsi
Cara bekerja bersama jika terdapat berbilang fungsi L2 pada kenderaan. Rajah di bawah ialah contoh topologi berbilang pengawal yang dipermudahkan.
Rajah 10 Skim topologi berbilang pengawal fungsi L2 serta pengawal domain
Enam pengawal disepadukan ke dalam topologi ini Fungsi yang disediakan oleh "Sistem Tempat Letak Kereta Automatik Sepenuhnya", "Kamera Pintar Menghadap ke hadapan" dan "Radar Gelombang Milimeter menghadap ke hadapan" adalah seperti yang dinyatakan sebelum ini. Radar sudut kiri dan kanan ialah dua peranti bercermin, masing-masing beroperasi secara bebas boleh merealisasikan fungsi seperti "penggera menghampiri kenderaan belakang" dan "penggera pembukaan pintu". "Sistem pemantauan pemandu" mengesan status pemandu dan boleh memberi amaran apabila mendapati pemandu letih semasa memandu Jika pemandu benar-benar hilang keupayaan untuk bergerak, ia akan memberitahu sistem lain untuk cuba memperlahankan dan berhenti.
Topologi ini mempunyai perkara utama berikut: memperkenalkan pengawal domain untuk menyambungkan berbilang pengawal fungsi bantuan pemanduan bebas dan menyambungkan pengawal domain ke rangkaian tulang belakang berbilang bas Can dalam bantuan pemanduan; domain, Elakkan jalur lebar bas yang tidak mencukupi.
Dari segi seni bina perisian, setiap pengawal bantuan pemanduan beroperasi secara bebas dan secara bebas memutuskan untuk memulakan dan menghentikan fungsinya sendiri. Isyarat kawalan yang berkaitan dihantar ke pengawal domain, yang memajukannya ke domain kuasa. Pengawal domain bantuan pemandu bertanggungjawab untuk mengadili output kawalan pengawal individu. Dari perspektif peranan yang boleh dimainkan oleh pengawal domain di sini, terdapat pelbagai reka bentuk yang mungkin dari ringan hingga berat. Dalam reka bentuk pengawal domain ringan, pengawal domain hanya melakukan pemajuan data ringkas, menapis data pada rangkaian tulang belakang dan menghantarnya kepada pengawal dalam domain. Hantar isyarat kawalan daripada pengawal dalam domain ke rangkaian tulang belakang. Kaedah ini tidak memerlukan kuasa pengkomputeran tinggi pengawal domain.
Jika pengawal domain menjalankan beberapa kerja lagi, ia boleh mengambil alih kerja pengiraan bahagian domain masa nyata pengawal lain. Sebagai contoh, pengiraan kawalan perancangan ACC/AEB/LKA semuanya dilakukan pada pengawal domain. Ini memerlukan pengawal lain untuk menghantar data penderiaan kepada pengawal domain, yang akan diproses secara seragam oleh pengawal domain. Ini memerlukan kuasa pengkomputeran yang lebih tinggi. Pada masa yang sama, keperluan lebar jalur untuk rangkaian intra-domain juga telah meningkat.
Pergi lebih jauh, kerana ia boleh mendapatkan semua data penderiaan, pengawal domain juga boleh membangunkan beberapa fungsi tambahan, seperti bergantung pada penderia dalam gambar, yang mungkin dalam domain pengawal Menyedari fungsi bantuan pertukaran lorong atau mengelakkan halangan kecemasan.
Memandangkan fungsi secara beransur-ansur tertumpu pada pengawal domain, bahagian pengawal lain yang tidak sedar yang menanggung bahagian penderiaan dilemahkan secara beransur-ansur.
Model Konsep EPX-SA
Mekanisme Timbang Tara
Depan Bercakap tentang, merealisasikan fungsi ACC/AEB/LKA, merealisasikan tempat letak kenderaan automatik sepenuhnya, dan fungsi lain di bawah satu L2 semuanya boleh difahami sebagai model EPX-S rekursif fraktal satu atau dua lapisan.
Malah, ketiga-tiga fungsi ACC/AEB/LKA boleh dihidupkan pada masa yang sama dalam produk pengeluaran besar-besaran sebenar, dan setiap satu adalah kitaran EPX-S yang berasingan. Ini bermakna berbilang gelung EPX-S boleh dijalankan secara serentak dan selari. Jika output X dijana pada masa yang sama, ia perlu ditimbangtarakan oleh mekanisme timbang tara (Arbitration).
Apabila berbilang pengawal berjalan pada masa yang sama, pengawal domain menimbang tara pada tahap yang lebih tinggi.
Jadi model EPX-S hendaklah dipanjangkan kepada model EPX-SA. Seperti yang ditunjukkan dalam rajah di bawah, Senario 1 dan Senario 2 ialah dua gelung EPX-S yang berjalan selari, dan X yang mereka hasilkan ialah output selepas timbang tara.
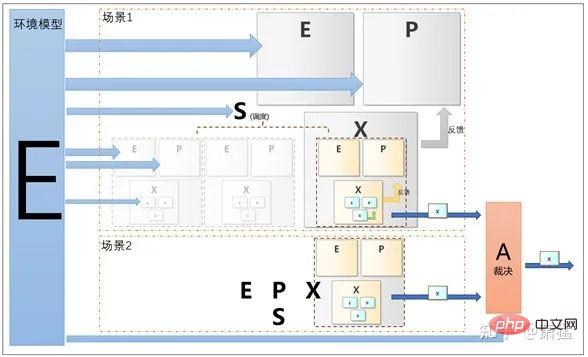
Rajah 11 Model Konsep EPX-SA
Persekitaran Cadangan konsep model
Setiap pengawal yang melaksanakan fungsi L2 tunggal mempunyai beberapa aspek keupayaan persepsi. Kesemuanya menerangkan aspek tertentu sifat persekitaran dalaman dan luaran kenderaan, yang boleh dibahagikan daripada sudut dan jarak ruang, atau daripada sifat fizikal, seperti cahaya boleh dilihat, gelombang ultrasonik, gelombang milimeter dan laser. Jika sistem model 3D yang ideal dan tepat sepenuhnya diwujudkan untuk keseluruhan persekitaran, setiap penderia adalah setara dengan penapis untuk model Seperti "lelaki buta menyentuh gajah", setiap penderia menyatakan aspek tertentu dari sifat model yang ideal.
Bahagian persepsi pemanduan pintar sebenarnya adalah menggunakan seberapa banyak penderia yang mungkin ditambah algoritma untuk mencapai anggaran kepada model yang ideal. Lebih banyak penderia yang tersedia, lebih tepat algoritma dan semakin kurang ia akan menyimpang daripada model ideal.
Dalam pengawal domain L2, jika perlu, data penderiaan semua pengawal peringkat rendah boleh diperolehi Kemudian pada tahap ini, nilai ideal boleh dinyatakan berdasarkan semua mengesan keputusan Walaupun model realistik model alam sekitar masih jauh daripada model ideal, ia sudah menjadi model alam sekitar dalam erti kata keseluruhan.
Maklumat yang disediakan oleh model persekitaran bukan sahaja digunakan dalam modul perancangan (P) di semua peringkat, tetapi juga dalam peringkat penjadualan (S) dan timbang tara (A).
Atas ialah kandungan terperinci Ketahui seni bina perisian pengawal domain pemanduan pintar dalam satu artikel. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI