
Rumah >Peranti teknologi >AI >Artikel membincangkan isu dan cabaran dalam perancangan keputusan pemanduan autonomi
Artikel membincangkan isu dan cabaran dalam perancangan keputusan pemanduan autonomi

- 王林ke hadapan
- 2023-05-13 08:07:101268semak imbas
Dalam modul penentududukan, persepsi, ramalan, perancangan keputusan dan kawalan pemanduan berautonomi, modul persepsi adalah seperti mata dan telinga manusia, bertanggungjawab untuk mengesan persekitaran luaran adalah seperti tangan dan kaki manusia untuk pecutan akhir, nyahpecutan, stereng dan operasi lain; modul perancangan membuat keputusan adalah seperti otak manusia, membuat keputusan tingkah laku dan penjanaan trajektori berdasarkan persepsi yang diterima dan maklumat lain.
Selamat mengikuti akaun video WeChat "Smart Driving Frontier" Sama seperti otak manusia dibahagikan kepada otak kiri dan otak kanan, modul perancangan membuat keputusan boleh dibahagikan lagi kepada keputusan tingkah laku-. membuat lapisan (Lapisan Tingkah Laku) dan lapisan perancangan gerakan (Motion Planning).
Selepas menerima laluan global, lapisan membuat keputusan tingkah laku menggabungkan maklumat deria untuk membuat keputusan tingkah laku tertentu merancang untuk menjana trajektori yang memenuhi kekangan tertentu berdasarkan keputusan tingkah laku tertentu adalah sebagai Input daripada modul kawalan menentukan laluan perjalanan terakhir kenderaan.
Memandangkan tahap pemanduan autonomi terus bertambah baik, kepentingan lapisan membuat keputusan dan perancangan sebagai otak pemanduan autonomi juga telah meningkat. Tetapi berbanding dengan otak manusia, otak pemanduan autonomi masih jauh untuk mengejarnya. Artikel ini akan memperincikan masalah dan cabaran Perancangan Pergerakan dalam perancangan laluan melalui sepuluh ribu perkataan.
01 Algoritma yang biasa digunakan untuk Perancangan Pergerakan
Algoritma Perancangan Pergerakan dibangunkan daripada bidang robotik, dan secara beransur-ansur telah membangunkan pelbagai algoritma yang sesuai untuk bidang pemanduan autonomi. Kertas [1] memberikan gambaran keseluruhan kaedah penjanaan trajektori Perancangan Pergerakan Kaedah yang diperkenalkan ditunjukkan dalam rajah di bawah.
Algoritma berdasarkan carian pensampelan: Dijkstra, RRT, A*, hybridA* dan Lattice, dll.; dan lengkung spline, dsb.;
Algoritma berasaskan pengoptimuman: Apollo's piecewise-jerk, dsb.
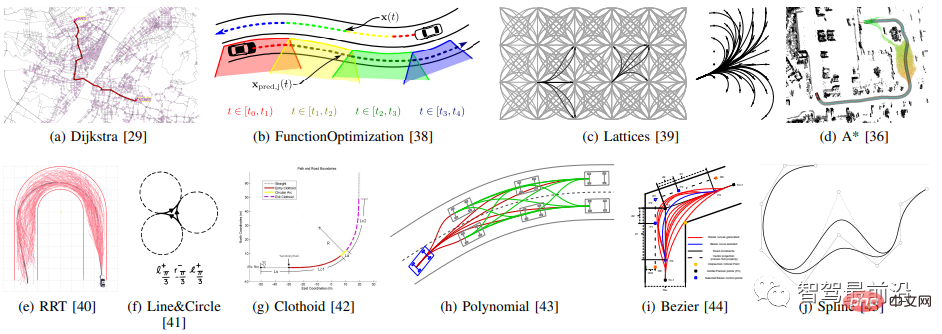 Algoritma di atas biasanya digunakan dalam kombinasi dengan satu sama lain daripada. Contohnya, lengkung polinomial perlu mencuba keadaan terminal, lengkung Bezier perlu mencuba titik kawalan, dan hybird A* menggunakan lengkung RS atau lengkung Dubins, dsb.
Algoritma di atas biasanya digunakan dalam kombinasi dengan satu sama lain daripada. Contohnya, lengkung polinomial perlu mencuba keadaan terminal, lengkung Bezier perlu mencuba titik kawalan, dan hybird A* menggunakan lengkung RS atau lengkung Dubins, dsb.
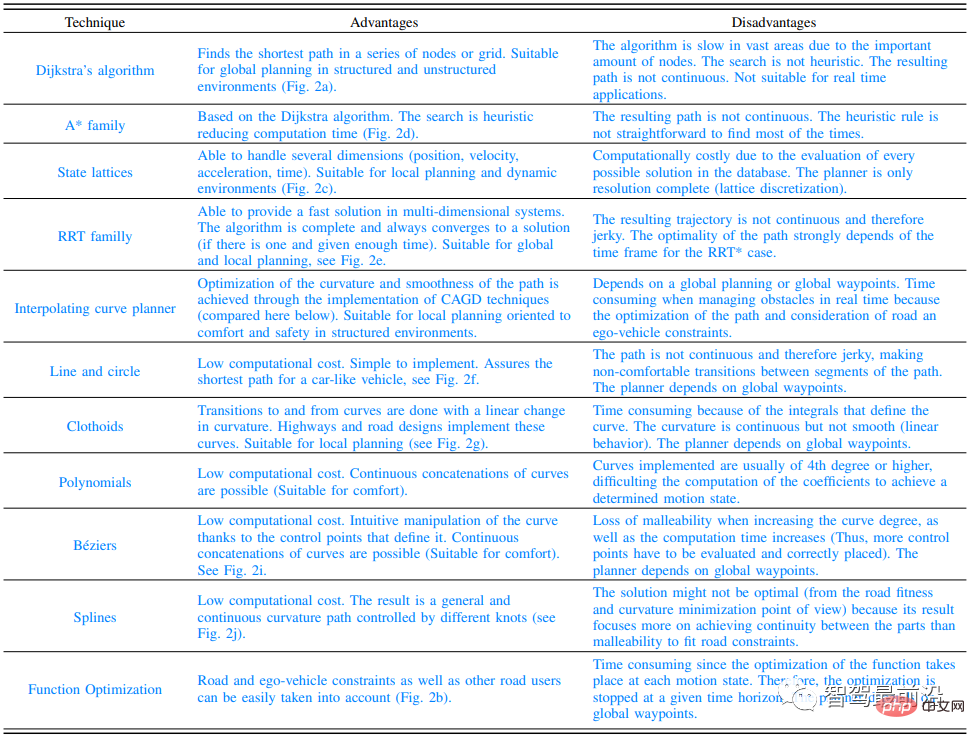
Kertas [1] meringkaskan kebaikan dan keburukan pelbagai algoritma penjanaan trajektori, seperti yang ditunjukkan dalam rajah di bawah. Ia boleh dilihat bahawa tiada algoritma yang sempurna, dan algoritma yang sesuai perlu dipilih berdasarkan senario dan keadaan kerja tertentu. Pada masa ini, interpolasi lengkung polinomial (senario berkelajuan tinggi) dan algoritma pengoptimuman digunakan secara meluas dalam industri.
 02 Isu dan cabaran Perancangan Pergerakan
02 Isu dan cabaran Perancangan Pergerakan
Algoritma Perancangan Pergerakan yang diperkenalkan di atas pada asasnya boleh menyelesaikan kebanyakan masalah penjanaan trajektori dalam senario penjanaan trajektori bukan lagi halangan utama. Walau bagaimanapun, masih terdapat banyak cabaran yang perlu diatasi dalam bidang Perancangan Gerakan, terutamanya termasuk aspek berikut:
Masalah Optimaliti;
Masalah penaakulan kognitif; Tiada Ketidakpastian/Kebarangkalian;
Ejen Tunggal;
Berbilang Ejen;
2.1 Masalah keoptimuman
Pengoptimuman global ialah masalah sukar NP [3]. Untuk prestasi masa nyata, kebanyakan dalam industri menggunakan kaedah perancangan penyahgandingan mendatar dan menegak. Walau bagaimanapun, berbuat demikian akan mengorbankan keoptimuman, dan tingkah laku kenderaan yang baik tidak boleh diperoleh di bawah beberapa keadaan kerja, seperti memotong [2], kenderaan yang akan datang, pemprosesan kekangan pecutan sentripetal, dan perancangan mendatar yang memerlukan pertimbangan keupayaan perancangan membujur.
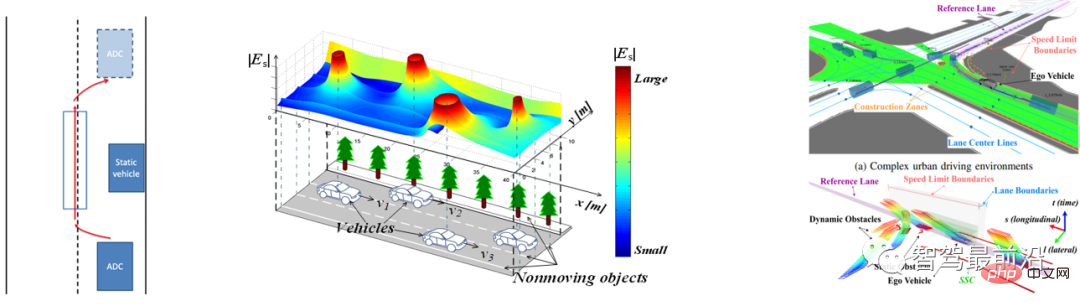
Sebagai contoh, apabila terdapat kenderaan yang perlahan di hadapan Autonomous Driving Car (ADC), kaedah penyahgandingan mendatar dan menegak secara amnya hanya memotong apabila kelajuan kenderaan di hadapan berkurangan kepada nilai tertentu. . Tingkah laku ADC adalah untuk memperlahankan atau berhenti dahulu, dan kemudian memandu di sekeliling halangan Ini jelas bukan strategi pemanduan yang optimum.
Jika kaedah perancangan bersepadu spatio-temporal diguna pakai, nyahpecutan atau tingkah laku tempat letak kereta boleh dielakkan. Gambar kiri dalam rajah di bawah adalah contoh kaedah penyahgandingan Apabila terdapat kenderaan nyahpecutan dan parkir di hadapan, ADC akan berkurangan. Gambar di sebelah kanan adalah contoh perancangan spatio-temporal ADC akan memotong apabila kenderaan di hadapan menjadi perlahan.
2.2 Isu penaakulan kognitif2.2.1 Penaakulan topologi peta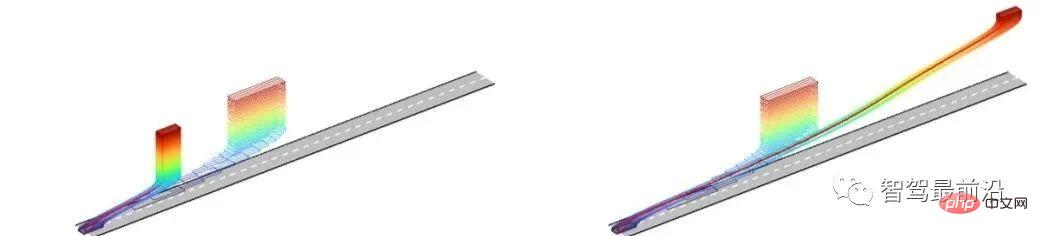
Ambil Apollo sebagai contoh, PNC Modul Map mengekstrak data daripada modul HD Map untuk membentuk garis rujukan dan menanyakan elemen jalan melalui antara muka API modul HD Map. Walau bagaimanapun, modul Perancangan Pergerakan mengabaikan beberapa perhubungan topologi jalan, seperti persimpangan masuk dan keluar, dan topologi jalan khas ini akan mempengaruhi tingkah laku kenderaan.
Selain itu, jika tiada modul Peta HD dan bergantung semata-mata pada garis lorong visual, persepsi garis lorong akan menjadi tidak normal pada masa ini. Masalah topologi jalan amat ketara di jalan masuk dan keluar serta jalan persimpangan.
2.2.2 Pemodelan bersepadu bagi halanganPeserta dalam adegan lalu lintas termasuk kenderaan, motosikal, basikal, pejalan kaki, kon, dll. Secara umum, ia juga termasuk elemen peta statik seperti persimpangan jalan, lampu isyarat dan had laju jalan raya perlu membuat keputusan yang berbeza untuk elemen yang berbeza. Pemodelan bersepadu halangan boleh memudahkan masalah dan meningkatkan kecekapan pengiraan.
Aopllo mengabstrak semua peserta trafik ke dalam Halangan Statik, Halangan Dinamik dan Halangan Maya ialah kotak, Halangan Statik dan Halangan Dinamik ialah kenderaan, pejalan kaki, dsb., dan Halangan Maya. ialah Crosswalk, tiada kawasan letak kereta, dsb. Halangan Maya tidak dipertimbangkan semasa perancangan laluan.
Gunakan kaedah berkaitan medan tenaga untuk mewakili peserta trafik menggunakan fungsi tenaga. Gambar tengah dalam gambar di atas ialah medan keselamatan memandu yang dicadangkan oleh Tsinghua [4], yang terdiri daripada medan tenaga potensi objek pegun, medan tenaga kinetik objek bergerak dan medan tingkah laku pemandu. Trajektori yang optimum adalah untuk mencari trajektori dengan jumlah tenaga minimum.
Kertas [5] membahagikan peserta trafik kepada seperti halangan dan seperti kekangan. Seperti halangan ialah kenderaan dinamik dan statik, lampu merah, dsb., yang dipetakan ke grid 3D SLT. Seperti kekangan ialah had laju, tanda berhenti, dsb., sebagai sempadan semantik. Mengikut tindakan urutan keputusan, beberapa sempadan kubus dijana dalam ruang konfigurasi SLT untuk penjanaan trajektori.
2.2.3 Penaakulan Kognitif Senario
Disebabkan oleh kerumitan persekitaran sebenar, adalah sukar bagi satu strategi membuat keputusan atau kaedah perancangan untuk mengendalikan keadaan kerja yang berbeza . Oleh itu, mengklasifikasikan persekitaran pemanduan dan memilih strategi yang berbeza dalam senario yang berbeza boleh meningkatkan prestasi Perancangan Pergerakan. Jadi bagaimana untuk menjalankan klasifikasi pemandangan dan pengecaman pemandangan, dan apakah perbezaan antara Perancangan Pergerakan dalam adegan yang berbeza? Masalah ini semua perlu diselesaikan.
Klasifikasi adegan dalam Aopllo ialah LANE_FOLLOW, SIDE_PASS, STOP_SIGN_UNPROTECTED, dsb. Terdapat dua kaedah pengecaman pemandangan, satu melalui peraturan dan satu lagi melalui pembelajaran mesin. Senario yang berbeza mempunyai peringkat yang berbeza, dan tugasan dilaksanakan secara berurutan dalam peringkat. Malah tugas yang sama mungkin mempunyai konfigurasi parameter yang berbeza dalam senario yang berbeza.
Berdasarkan ciri pemandangan bandar dengan banyak persimpangan, kesesakan dan pertukaran lorong, Haimou membahagikan adegan pemanduan kepada sepuluh kategori Ini jelas berbeza daripada klasifikasi senario di Apollo Namun, kaedah pengecaman pemandangan Haimou bukanlah sama. Hao Mo turut mencadangkan konsep entropi persekitaran pemanduan untuk menggambarkan keadaan kesesakan persekitaran pemanduan.
2.3 Ketidakpastian
2.3.1 Ketidakpastian kedudukan
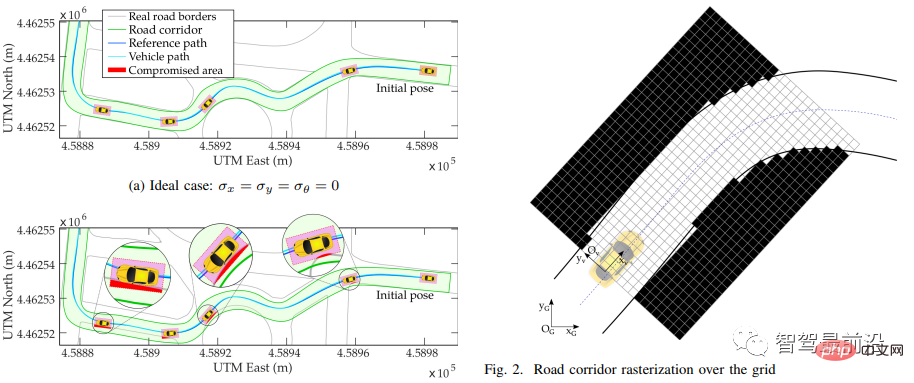
Dalam kebanyakan Perancangan Pergerakan, kedudukan dianggap cukup tepat , kedudukan selalunya tidak tepat kerana masalah seperti oklusi dan gangguan berbilang laluan. Seperti yang ditunjukkan dalam rajah kiri bawah dalam kertas [6], ralat kedudukan menyebabkan ralat dalam sempadan jalan yang ditanya daripada modul Peta HD, supaya trajektori perancangan dan pemanduan kenderaan berada di sempadan jalan.
Gambar
Makalah ini menganggap bahawa ketidakpastian kedudukan ialah taburan Gaussian, dan modul penentududukan boleh mengira jangkaan dan varians taburan kebarangkalian. Kertas kerja menukar sistem koordinat kenderaan kepada sistem koordinat UTM Mengikut taburan berkelajuan tinggi kedudukan dan formula transformasi koordinat, ketidakpastian persekitaran sekeliling kenderaan di bawah pengaruh kedudukan boleh dikira, seperti yang ditunjukkan dalam rajah pada. sebelah kanan di atas, di mana lebih gelap warna Semakin besar ketidakpastian, formula pengiraan ketidakpastian diperoleh terutamanya oleh formula berikut.
Dapat didapati bahawa semakin jauh dari ADC, semakin tinggi ketidakpastian Apabila kenderaan bergerak ke hadapan, ketidakpastiannya akan dikemas kini. Kaedah perancangan laluan menggunakan kaedah Lattice (keluk polinomial kuintik), dan dua item ditambah semasa pengiraan kos. Satu adalah kekangan yang sukar: ketidakpastian maksimum titik pada laluan perancangan tidak boleh lebih besar daripada ambang tertentu ialah menambah jumlah berat ketidakpastian dalam fungsi kos.
2.3.2 Ketidakpastian persepsi
Disebabkan oleh bunyi sensor, getaran kenderaan, persekitaran pemanduan dan algoritma yang tidak sempurna, persepsi Keputusan yang diperolehi tidak pasti atau salah. Ketidakpastian yang dirasakan boleh menyebabkan ketidakamanan dalam keputusan Perancangan Pergerakan. Kaedah pemprosesan yang mudah ialah menambah penimbal, tetapi kaedah pemprosesan kasar akan mengurangkan julat Perancangan Pergerakan yang boleh dilaksanakan dan boleh mengakibatkan strategi pemanduan yang terlalu agresif atau terlalu konservatif.
Kertas [7] mengambil aplikasi tempat letak kereta yang dilengkapi dengan Around View Monitoring (AVM) sebagai contoh Disebabkan ralat persepsi, perancangan laluan akan menyebabkan tempat letak kereta di kedudukan memotong sebenar, dan perlanggaran mungkin berlaku. , seperti yang ditunjukkan dalam rajah kiri di bawah. Kertas itu memodelkan ketidakpastian yang dirasakan sebagai taburan Gaussian Semakin jauh kesan yang dirasakan adalah dari ADC, semakin tinggi ketidakpastian, seperti yang ditunjukkan dalam rajah di bawah.
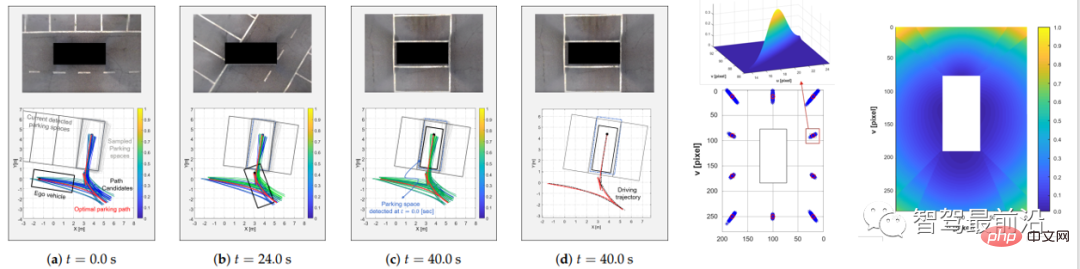
Seni bina keseluruhan kertas ditunjukkan dalam gambar kiri di bawah. Kesan penggunaan algoritma ini ditunjukkan dalam gambar kanan di bawah.
Pensampelan ruang letak kereta: Persampelan dua titik penjuru yang paling hampir dengan ADC, perlakukan titik pensampelan sebagai taburan biasa, dan pengiraan pusat letak kereta gandar belakang ADC berdasarkan titik sudut pensampelan dan panjang ruang letak kereta yang ditetapkan. titik;
Penjanaan calon laluan: Gunakan teori OCP untuk melaksanakan perancangan laluan bagi setiap titik persampelan, di mana masalah domain masa ditukar kepada sistem koordinat Ferent, dan SQP digunakan untuk menyelesaikan masalah bukan linear; >
Pemilihan Laluan Optimum: Gunakan teori utiliti untuk memilih laluan optimum. Fungsi utiliti ialah: EU(s) = P(s) x Uideal(s) +(1-P(s)) x Ureal(s), dengan P(s) ialah kebarangkalian laluan yang sepadan dengan titik pensampelan, dan Uideal ialah laluan ke Nilai fungsi utiliti sisihan bagi titik sasaran (dikesan secara deria pada saat semasa, tidak diperoleh melalui pensampelan), Ureal ialah nilai fungsi utiliti pada laluan ke kedudukan semasa ADC.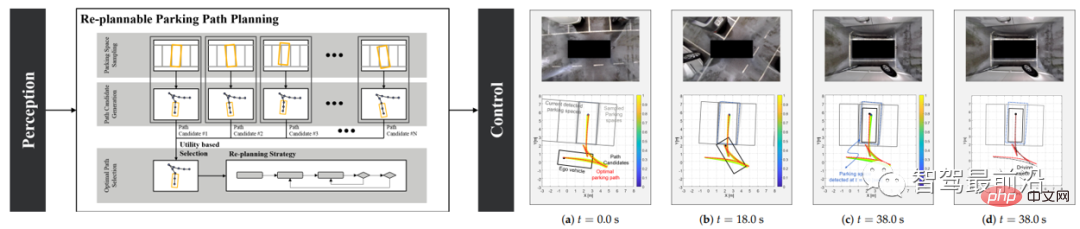
2.3.3 Ketidakpastian Ramalan
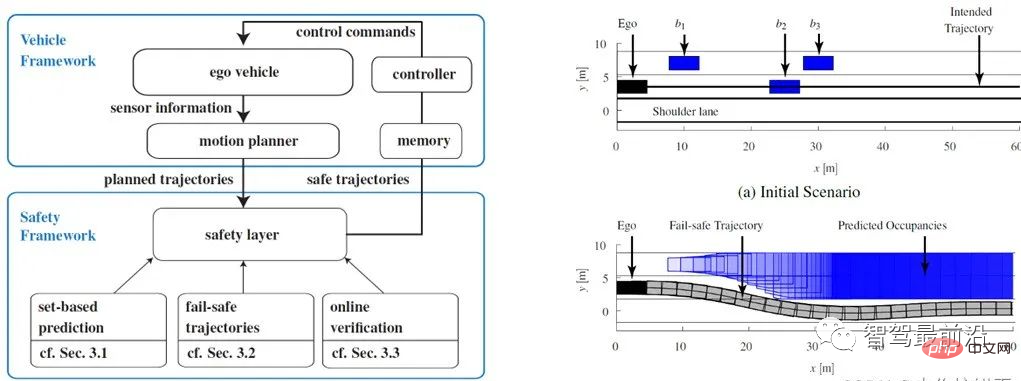
Ramalan ialah pautan penting dalam mencapai pemanduan autonomi peringkat tinggi di atas L4. Walau bagaimanapun, setakat ini, ramalan masih menjadi masalah yang sangat sukar untuk keseluruhan industri. Oleh itu, ketepatan ramalan adalah sangat lemah, dan sangat penting untuk melakukan perancangan gerakan di bawah ketidakpastian keputusan ramalan. Kertas [8] mencadangkan seni bina perancangan berdasarkan pengedaran Gaussian untuk menangani masalah trajektori perancangan yang tidak selamat yang disebabkan oleh ketidakpastian dalam ramalan dan kawalan. Penjanaan trajektori calon: dijana melalui persampelan mendatar dan menegak berbilang peringkat. Ia boleh difahami sebagai kaedah Aopllo Lattice. Penjanaan trajektori yang diramalkan: Apabila meramalkan (merancang) trajektori kenderaan tertentu, kenderaan lain dianggap bergerak pada kelajuan tetap dan keadaannya ditentukan Kemudian, dengan mengira kos trajektori calon , kita mendapat trajektori ramalan yang optimum. Taburan kebarangkalian trajektori yang diramalkan kemudiannya dikira melalui penapisan Kalman, dengan mengandaikan bahawa ia mengikuti taburan normal. Penjanaan trajektori ADC: Pada masa ini, ketidakpastian ramalan peserta trafik lain perlu dipertimbangkan. Bagi setiap trajektori calon, ralat kawalan dikira melalui algoritma LQR, dan kemudian taburan kebarangkalian trajektori dikira melalui penapisan Kalman Apabila pengiraan cos dilakukan untuk penilaian trajektori, pengesanan perlanggaran adalah berdasarkan taburan kebarangkalian ramalan dan. Trajektori yang dirancang ADC, iaitu Perlanggaran tidak boleh berlaku dalam mana-mana taburan kebarangkalian. Pengarang percaya bahawa kaedah ini adalah setara dengan menambahkan penimbal adaptif pada kotak, manakala penimbal saiz tetap konvensional akan membawa kepada tingkah laku pemanduan yang konservatif atau agresif.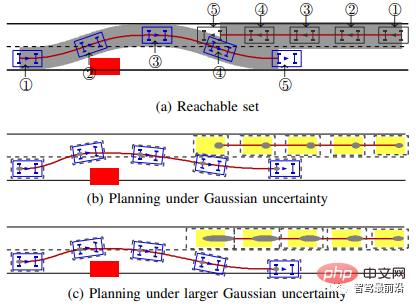
2.3.4 Persekitaran Separa Boleh Diperhatikan
Disebabkan julat penderiaan yang terhad bagi penderia itu sendiri dan ketidakpastian keputusan penderiaan , dalam Ia akan dikuatkan lagi dalam pencahayaan yang kurang baik atau cuaca buruk. Dalam keadaan kerja bandar, oklusi bangunan akan menyebabkan persepsi yang tidak lengkap, seperti yang ditunjukkan dalam rajah di bawah. Selain itu, kenderaan besar juga boleh menyebabkan masalah oklusi persepsi, dan kebanyakan Perancangan Pergerakan diproses dengan persepsi yang lengkap, jadi keputusan perancangan adalah sangat tidak selamat.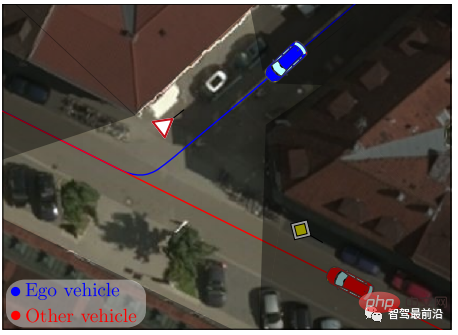
Gunakan Model Pemandu Pintar (IDM) untuk ramalan pecutan kenderaan.
Memandangkan kertas itu membincangkan dua situasi: jalan lurus dan persimpangan, pengecaman pemandangan diperlukan.

Gambar kiri atas: Garis titik merah ialah masa apabila persekitaran yang diperhatikan dirasai, dan garis titik hitam ialah masa untuk Perancangan Pergerakan maklumat penderiaan yang digunakan oleh Perancangan Gerakan adalah sebelum masa tp. Di samping itu, kerana Perancangan Pergerakan mesti memastikan kesinambungan, trajektori yang dirancang dalam kitaran pengiraan Perancangan Pergerakan tpin mestilah konsisten. Lebih penting lagi, disebabkan kelewatan penggerak, keselamatan trajektori mesti dipastikan dalam masa yang selamat. Dalam kertas, tsafe= 2tpin;
Gambar atas dan tengah: Memandu di jalan lurus terbahagi kepada dua situasi: tiada kenderaan dalam julat penderiaan atau terdapat kenderaan dalam julat penderiaan: Pertama, tiada kenderaan kenderaan dalam julat penderiaan, dengan mengandaikan terdapat kenderaan di luar julat penderiaan pemanduan Kenderaan pegun ditetapkan sebagai halangan pegun maya Melalui ciri pengedaran Gaussiannya, ia boleh dikira untuk memenuhi anjakan membujur dan kekangan kelajuan brek dengan brek maksimum. kapasiti dalam masa tsafe, kedua, jika terdapat kenderaan dalam julat penderiaan, pertimbangkan bahawa penderiaan tidak mungkin dalam keadaan yang menentukan, iaitu, kenderaan di hadapan adalah brek dengan kapasiti brek maksimum ciri pengedaran Gaussiannya, ia boleh dikira untuk memenuhi anjakan membujur dan kekangan kelajuan brek dengan kapasiti brek maksimum dalam masa yang selamat; ADC mengira sama ada ADC perlu memberi laluan atau mempunyai hak laluan dan perlu menunjukkan dengan jelas niatnya untuk lulus dahulu. Akhirnya ditukar kepada dua jenis kekangan untuk pemanduan lurus.
2.4 Ejen Tunggal
Ejen Tunggal menganggapnya sebagai masalah ejen tunggal, iaitu, ADC akan membuat keputusan terhadap persekitaran sekeliling tanpa mengambil kira kesan keputusan tingkah laku ADC terhadap peserta trafik yang lain. Jelas sekali andaian ini tidak betul, tetapi ia memudahkan masalah Perancangan Pergerakan.
Pembuatan keputusan tingkah laku ialah satu lagi aspek penting yang mempengaruhi perkembangan pemanduan autonomi Apabila tahap pemanduan autonomi meningkat, pembuatan keputusan tingkah laku menjadi lebih penting. Kesukaran dalam membuat keputusan tingkah laku ialah cara untuk menjelmakan kecerdasan kenderaan autonomi dan cara membolehkan kenderaan autonomi mengendalikan senario kompleks berdimensi tinggi dan pelbagai kekangan seperti pemandu manusia, atau malah berprestasi lebih baik daripada pemandu manusia.
Kebanyakan kaedah semasa adalah kaedah berasaskan peraturan dengan keupayaan terhad. Dari segi pembuatan keputusan tingkah laku berdasarkan kaedah peraturan, dalam keadaan luar tanjakan, ambang jarak dari pintu masuk tanjakan biasanya direka bentuk. Apabila jarak dari ADC ke tanjakan berada dalam ambang, pertukaran lorong ke lorong paling kanan bermula.
Anggapkan bahawa ambang ini ialah 2km Jika ADC memandu di lorong tengah pada 2.1m dari persimpangan tanjakan, dan terdapat sebuah kereta di hadapan pada kelajuan rendah, pembuatan keputusan berdasarkan peraturan. umumnya akan memilih untuk menukar ke lorong kiri (lorong kiri mempunyai had laju yang tinggi, dan memotong mesti mengikut lorong kiri. Ia boleh dilihat dari Xiaopeng NGP dan lain-lain bahawa lorong kiri mempunyai keutamaan). Walau bagaimanapun, ambang jarak ke pintu masuk tanjakan selepas menukar lorong adalah kurang daripada 2km Pada masa ini, adalah perlu untuk menukar lorong ke lorong paling kanan, dan perlu melakukan dua pertukaran lorong berturut-turut, yang kelihatan tidak cukup pintar.
Contoh lain ialah memandu di lorong paling kanan 500m sebelum tanjakan Jika jalan di hadapan tidak boleh dipandu kerana pembinaan atau kemalangan, pemandu hanya boleh mengambil alih. Dapat dilihat bahawa disebabkan kerumitan keadaan kerja sebenar, adalah sukar untuk mencapai pengalaman memandu yang baik dengan kaedah membuat keputusan tingkah laku berasaskan peraturan.
Kerja membuat keputusan tingkah laku Universiti Sains dan Teknologi Hong Kong pada OPMDP [11] mempunyai peningkatan prestasi tertentu berbanding kaedah berasaskan peraturan Ia memangkas tingkah laku ADC dan peserta trafik yang lain, mengurangkan OPMDP memakan masa. Walau bagaimanapun, ia mengambil kira bahawa peserta trafik lain akan mengelakkan tingkah laku ADC, dll. Ia dapat dilihat bahawa ia adalah masalah Multiple Agent untuk ditangani.
2.5 Ejen BerbilangEjen Tunggal yang disebut di atas percaya bahawa peserta trafik tidak akan membuat keputusan yang sepadan tentang tingkah laku ADC Tetapi dalam amalan, apabila ADC membuat Selepas keputusan dibuat, tingkah lakunya akan mempengaruhi tingkah laku peserta trafik yang lain, mengurangkan kredibiliti hasil ramalan asal Khususnya, beberapa ramalan berasaskan peraturan mudah tidak bergantung pada hasil Perancangan Pergerakan, atau menggunakan bingkai sebelumnya daripada Perancangan Gerakan (Apollo).
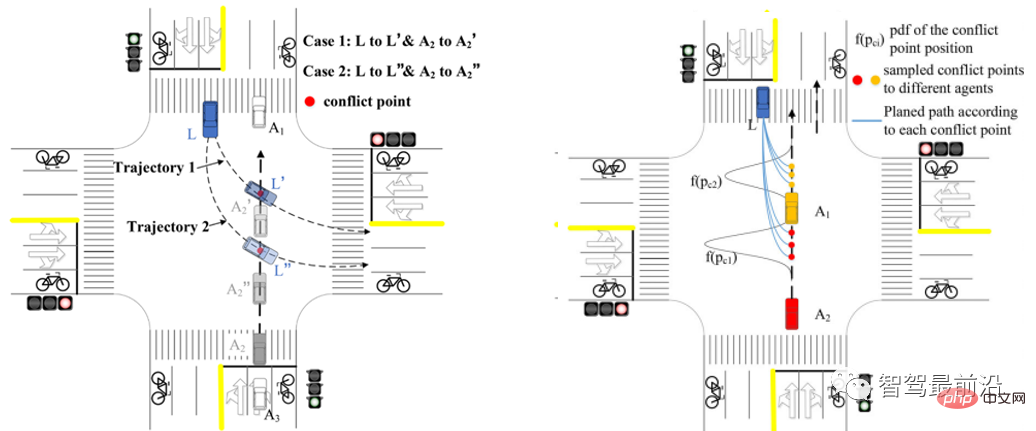
Contohnya, dalam gambar kiri di bawah, apabila ADC L bergerak di sepanjang trajektori 1, A2 mungkin perlahan untuk mengelakkannya. Apabila ADC L bergerak sepanjang trajektori 2, A2 mungkin memecut melalui persimpangan. Walau bagaimanapun, apabila ADC L memandu di sepanjang trajektori 2, diramalkan bahawa A2 mungkin memecut melalui persimpangan, tetapi A2 mungkin salah faham dengan niat ADC L dan perlahan, menyebabkan kedua-dua kenderaan itu terkunci. Oleh itu, bagaimana ADC memahami niat peserta trafik lain dan bagaimana kenderaan lalu lintas lain memahami niat ADC adalah penting [12].
 2.6 Isu kejuruteraan
2.6 Isu kejuruteraan
Terdapat juga beberapa isu kejuruteraan yang dihadapi dalam Perancangan Pergerakan, terutamanya termasuk aspek berikut.
Masa nyata: Masalah keoptimuman yang dinyatakan dalam soalan pertama Jika ia ingin diselesaikan, disebabkan kerumitan pengiraan carian dalam ruang tiga dimensi, prestasi masa nyatanya juga mengehadkan aplikasi perancangan spatio-temporal bersama. Selain itu, kekangan berskala besar dan tidak linear dalam algoritma pengoptimuman juga menghadapi cabaran masa nyata.
Kelengkapan: Algoritma seperti interpolasi dan Kekisi berkemungkinan lengkap Terutamanya dalam persekitaran berbilang halangan yang kompleks, sukar untuk mendapatkan trajektori bebas perlanggaran dengan persampelan terhad. Kaedah pengoptimuman tidak dapat mencapai kesempurnaan kerana penyelesaian berangka, dan penyelesai osqp yang biasa digunakan mungkin memberikan penyelesaian yang salah.
Sukar untuk diukur: Kebanyakan penunjuk penilaian dalam Perancangan Pergerakan adalah subjektif, seperti keselesaan dan kebolehlaluan, yang sukar untuk dinilai secara kuantitatif. Jurutera yang berbeza melaraskan parameter untuk mendapatkan sensasi badan yang berbeza, yang juga berbeza daripada perasaan subjektif penumpang. Oleh itu, kaedah pembelajaran mesin dicadangkan untuk mempelajari parameter atau strategi menukar lorong dalam Perancangan Pergerakan.
03 Penyelesaian Industri
Sebagai tindak balas kepada masalah dan cabaran di atas, syarikat dalam industri juga sedang giat meneroka dan mencadangkan beberapa penyelesaian, beberapa daripadanya disenaraikan di bawah.
Qingzhou Zhihang menggunakan perancangan bersama ruang masa untuk menyelesaikan masalah optimum, meningkatkan prestasi perancangan dan membangunkan perancang tak linear yang dibangunkan sendiri untuk penyelesaian yang cekap [2].
Dalam rangka kerja generasi baharu TuSimple, apabila memberikan maklumat seperti lokasi halangan dan kelajuan, modul persepsi juga menyediakan maklumat ketidakpastian atau kebarangkalian untuk memastikan perancangan membuat keputusan boleh membuat keputusan yang selamat dan selesa lebih awal [13 ].
Tesla menggunakan perancang untuk kenderaan lain peserta trafik. Walau bagaimanapun, apabila berinteraksi dengan kenderaan lain, perancangan tidak seharusnya hanya untuk ADC, tetapi harus dirancang bersama untuk semua peserta trafik untuk mengoptimumkan aliran trafik keseluruhan tempat kejadian. Untuk melakukan ini, perancang autopilot dijalankan untuk setiap objek yang mengambil bahagian dalam tempat kejadian. Di samping itu, untuk senario tempat letak kereta, algoritma carian A dan strategi gabungan rangkaian saraf digunakan, yang sangat mengurangkan penerokaan nod bagi algoritma A [15].
Xpeng dan Tesla telah mengoptimumkan masalah kehilangan garisan lorong dan perubahan dalam topologi jalan [14].
Waymo mencadangkan ChauffeurNet untuk meningkatkan prestasi membuat keputusan [16], dan Apollo mencadangkan seni bina pembelajaran tetulangnya sendiri berdasarkan ChauffeurNet [17].
Atas ialah kandungan terperinci Artikel membincangkan isu dan cabaran dalam perancangan keputusan pemanduan autonomi. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI