

 Peranti teknologiAIGambaran keseluruhan elemen teknikal utama dalam pembangunan pemanduan pintar
Peranti teknologiAIGambaran keseluruhan elemen teknikal utama dalam pembangunan pemanduan pintarGambaran keseluruhan elemen teknikal utama dalam pembangunan pemanduan pintar

01 Kedudukan bersepadu: elemen reka bentuk utama untuk pemanduan pintar berorientasikan masa depan
Dalam era pemanduan pintar, kereta sedang mengubah masa depan baharu . Perisian dan perkakasan automotif, seni bina dalaman, corak persaingan industri, dan pengagihan nilai dalam rantaian industri juga akan mengalami perubahan yang mendalam. Di bawah gelombang perubahan ini, kami percaya bahawa pemanduan pintar akan melalui tiga peringkat berturut-turut: peningkatan penggunaan pemanduan berbantu, penyelesaian pemanduan autonomi matang dan ekologi pemanduan autonomi yang dipertingkatkan, dan akan membawa tiga gelombang peluang untuk perkakasan, sistem perisian dan komersial operasi masing-masing.
Antaranya, Peta HD (peta definisi tinggi), sebagai faktor utama dalam navigasi dan kedudukan, juga akan mengalami perubahan reka bentuk yang besar. Ini terutamanya ditunjukkan dalam aspek penting berikut:
- Peta HD dan peta navigasi
Peta navigasi menyediakan panjang lorong dan anggaran keadaan jalan bagi perjalanan yang berkaitan. Peta berketepatan tinggi menyediakan keadaan jalan yang sangat terperinci. Seperti papan tanda jalan, cerun, garisan lorong dan lokasi garisan lorong. Ini akan ditanda pada peta HD. Dalam peta berketepatan tinggi, malah lokasi lampu isyarat tertentu ditandakan dengan data GPS berketepatan tinggi. Oleh itu, apabila kenderaan tanpa pemandu memandu di atas jalan raya, selagi ia mempunyai laluan yang dibuat dalam perancangan laluan global, dan kemudian menukar laluan ini kepada laluan di paras garisan lorong, kenderaan tanpa pemandu itu boleh mengikut setiap laluan yang ditanda di atas. -peta definisi Memandu di garisan tengah setiap lorong.
- Sambungan antara peta berketepatan tinggi dan modul lain
Peta berketepatan tinggi dan tanpa pemandu Modul kereta lain berkaitan dengan kedudukan, ramalan, persepsi, perancangan, keselamatan, simulasi, kawalan dan interaksi manusia-komputer, yang kesemuanya memerlukan bantuan peta berketepatan tinggi. Bukannya sesetengah modul tidak boleh melaksanakan fungsi ini tanpa peta berketepatan tinggi, tetapi dengan bantuan peta berketepatan tinggi, mereka boleh mendapatkan maklumat yang lebih tepat dan membuat keputusan yang lebih sesuai untuk keadaan lalu lintas pada masa itu. Saya tidak akan menghuraikan perkara teknikal yang lebih terperinci di sini, hanya penjelasan idea umum mereka
- Peta dan kedudukan berketepatan tinggi
Peranan utama peta berketepatan tinggi dalam penentududukan ialah ia memberikan maklumat tentang objek statik yang telah ditentukan untuk kedudukannya. Kemudian kenderaan tanpa pemandu itu pula boleh mencari kedudukan relatifnya dalam keseluruhan peta berdasarkan maklumat objek statik ini. Jika objek statik ini mempunyai koordinat latitud dan longitud ketepatan tinggi mereka sendiri, kenderaan tanpa pemandu boleh mencari koordinat latitud dan longitudnya sendiri berdasarkan koordinat latitud dan longitud ini, dengan itu merealisasikan gabungan penderia berdasarkan peta ketepatan tinggi dan kamera lidar kaedah. Dengan cara ini anda boleh menyingkirkan daripada bergantung pada data GPS. Kerana data GPS mempunyai bunyi yang sangat kuat apabila data disekat. Sudah tentu, pada peringkat ini, kaedah penentududukan berdasarkan gabungan sensor radar dan penglihatan tidak setepat data yang disediakan oleh GPS pembezaan, tetapi ia masih merupakan kaedah penentududukan. Lagipun, apabila tiada isyarat GPS, kenderaan tidak boleh memandu tanpa maklumat kedudukannya sendiri Pada masa ini, ia hanya boleh bergantung pada kaedah kedudukan lain.
- Peta berketepatan tinggi dan membuat keputusan
Hubungan antara ketepatan tinggi peta dan modul membuat keputusan Ia lebih mudah. Kerana jika kenderaan mengetahui laluan yang ingin dilalui pada masa hadapan dan papan tanda jalan serta lampu isyarat serta maklumat jalan yang berkaitan dengan laluan yang ingin dilalui, modul membuat keputusan boleh membuat keputusan yang lebih sesuai dengan keadaan jalan semasa. Ia bersamaan dengan jika kita tahu apa yang akan berlaku pada masa hadapan, kita boleh menyesuaikan tingkah laku semasa kita dalam masa untuk menangani apa yang akan berlaku pada masa hadapan.
- Peta HD dan modul simulasi
Hubungan antara peta HD dan modul simulasi ialah Ia lebih mudah untuk difahami kerana selagi kita meletakkan kenderaan atau mengesahkan algoritma lain pada peta dengan piawaian peta ketepatan tinggi, maklumat yang diperoleh oleh kenderaan dalam aplikasi sebenar adalah sama seperti maklumat yang kami peroleh dalam simulasi. Dalam erti kata lain, kod yang kita bina dalam persekitaran simulasi juga boleh digunakan dalam persekitaran sebenar pada tahap yang besar.
- Peta berketepatan tinggi dan modul persepsi
Modul persepsi dalam pemanduan tanpa pemandu ialah modul yang agak kompleks. Kerana ia melibatkan banyak, banyak masalah kehidupan sebenar. Tetapi sebenarnya, banyak perkara dalam kebanyakan persekitaran yang kita anggap adalah statik. Jadi dalam persekitaran statik ini kita tidak perlu menggunakan kuasa pengkomputeran tambahan untuk mengira perkara yang boleh disimpan dalam pangkalan data terlebih dahulu. Sebagai contoh, jika bangunan tertentu berada di lokasi tertentu, tidak kira berapa kali kenderaan itu memandu ke lokasi ini, bangunan yang dilihatnya setiap masa adalah pada ketika itu. Walau apa pun kaedah persepsi, kedudukan bangunan tidak akan berubah dengan persepsi kenderaan. Kemudian lokasi khusus perkara seperti ini boleh dikumpulkan oleh kenderaan pengumpulan peta berketepatan tinggi, dan kemudian data boleh disimpan pada pemacu keras tempatan kenderaan tanpa pemandu. Kemudian kenderaan tanpa pemandu itu boleh menggunakan pangkalan data ini untuk mengetahui bahawa terdapat bangunan di sana setiap kali ia memandu ke bangunan itu tanpa mengenal pastinya. Sama seperti modul penentududukan, jika kita mengetahui koordinat ketepatan tinggi bangunan ini, kita boleh mencari kedudukan kita sendiri secara terbalik berdasarkan koordinat ini. Selain itu, berdasarkan bentuk bangunan dan ciri fizikalnya yang telah disediakan lebih awal, kuasa pengkomputeran boleh ditumpukan untuk mengenal pasti objek dinamik selain daripada bangunan ini.
- Peta HD dan Modul Kawalan
Kandungan khusus kawalan adalah sangat terperinci, dan saya tidak begitu jelas mengenainya. Tetapi jika ia adalah untuk mengawal sudut stereng, data garis tengah garisan lorong yang disediakan oleh peta berketepatan tinggi adalah penting. Kerana walaupun garisan lorong akan dikenal pasti berdasarkan kamera, kedudukan garisan tengah kemudiannya akan dikenal pasti berdasarkan garisan lorong ini. Tetapi perkara ini masih tidak tepat seperti data yang disediakan oleh peta berketepatan tinggi. Lagipun, pengecaman garis lorong berasaskan kamera adalah masa nyata dan pasti akan membuat kesilapan sekali-sekala. Atau apabila garisan lorong menjadi tidak jelas kerana ia tidak diselenggara untuk masa yang lama, maka kamera tidak dapat mengecam maklumat garisan lorong yang sepadan Dalam kes ini, peta berketepatan tinggi diperlukan. Garisan lorong ialah sekeping data yang sangat penting dalam pemanduan manusia, jadi pemanduan autonomi berasaskan kamera semasa hanya boleh dilaksanakan di lebuh raya. Kerana hanya laluan lorong di lebuh raya berada dalam keadaan penyelenggaraan yang lebih baik. Boleh dikenal pasti dengan mudah. Sebaliknya, garisan lorong dalam persekitaran bandar tidak diselenggara dengan baik. Oleh itu, pemanduan autonomi berasaskan kamera di jalan bandar masih belum digalakkan.
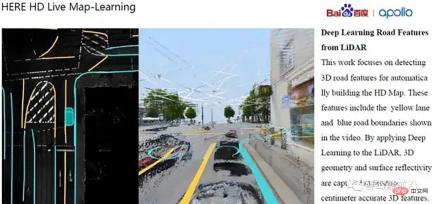
- Proses pengeluaran peta berketepatan tinggi
Sejujurnya, saya ada tidak menutupnya di sini juga Tetapi saya mendengarnya daripada guru. Peta definisi tinggi pertama kali digunakan untuk menyapu jalan oleh kenderaan yang dilengkapi dengan pelbagai penderia. Selepas kenderaan jenis ini mengimbas setiap jalan, ia boleh mendapatkan maklumat awan titik yang berkaitan, maklumat kamera dan maklumat longitud dan latitud berketepatan tinggi yang lain. Kakitangan kemudian akan mengeditnya lagi di luar talian berdasarkan maklumat ini. Apa yang terlibat di sini ialah penyambungan awan titik, maklumat jalan yang dikenali oleh kamera, seperti garisan lorong, lintasan zebra dan lampu isyarat. Objek statik ini perlu disahkan dan ditandakan oleh kakitangan. Walaupun kamera pada kenderaan pemerolehan akan melakukan pengecaman ciri awal untuk mengekstrak ciri berkaitan jalan ini. Tetapi selepas semua, ia berdasarkan penglihatan komputer, dan maklumat yang diekstrak tidak 100% betul Ia mungkin salah, atau beberapa anotasi mungkin tidak ditanda dengan baik. Oleh itu, langkah terakhir masih memerlukan kakitangan menjalankan pengesahan dan penandaan akhir.
- Proses pengeluaran peta berketepatan tinggi menyokong perkhidmatan peta ketepatan tinggi V2X pengkomputeran tepi
Perkembangan masa depan pemanduan autonomi terutamanya akan bergerak ke arah dua arah utama: kecerdasan dan rangkaian Tumpuan adalah pada peralihan beransur-ansur daripada risikan hujung kenderaan kepada risikan tepi jalan dan juga hujung awan. Untuk penggunaan peta berketepatan tinggi, perkara yang paling penting ialah siri peningkatan dan perubahan yang telah berlaku pada awan, tepi jalan dan sisi kenderaan. Antaranya, perubahan awan terutamanya melibatkan perkhidmatan peta berketepatan tinggi, pengagregatan data berpecah-belah, tepi data dan perpecahan data. Hujung tepi jalan terutamanya melibatkan beberapa aspek seperti kemas kini penyumberan ramai peta berpecah, pengurusan versi peta, subkontrak peta, pengoptimuman maklumat dinamik di tepi jalan dan perkhidmatan mesej peta. Apabila digunakan pada kereta, ia memerlukan gabungan data subkontrak, pemulihan pemandangan V2X dan enjin peta berketepatan tinggi untuk dikemas kini dengan sewajarnya.

Proses kemas kini berulang peta di atas boleh digunakan untuk merealisasikan fungsi tanpa pemandu tahap L4/L5 dan menjana mod kawalan robot yang berkaitan Ia juga boleh digunakan dalam merealisasikan kenderaan komersial untuk mencapai tanpa pemandu dan malah jauh memandu.
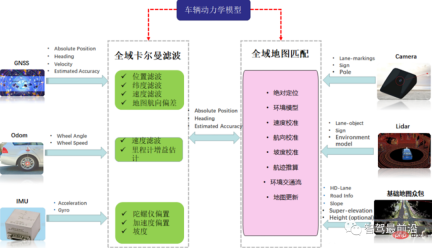
02 Penyelesaian penentududukan gabungan ketepatan tinggi untuk pengeluaran besar-besaran
Jelas sekali, peta berketepatan tinggi adalah perlu untuk mencapai kedudukan yang tepat dan terus memanjang ke hadapan untuk meningkatkan fungsinya prestasi. Diperolehi dengan terus mengoptimumkan penyelesaian kedudukan bersepadunya sendiri. Proses ini melibatkan dua algoritma perisian utama. Yang pertama adalah untuk melakukan anggaran dinamik pose kenderaan yang optimum melalui penapisan Kalman lanjutan keadaan penuh yang kedua ialah menggunakan penderia visual untuk mendapatkan maklumat semantik persekitaran jalan dan mendapatkan kedudukan yang tepat melalui algoritma padanan peta yang tepat. Di samping itu, terdapat keperluan untuk meningkatkan ekonomi, kecergasan dan prestasi keseluruhan. Dengan memilih untuk mengkonfigurasi terminal dipasang kenderaan gred industri RTK: menggunakan pemproses 32-bit gred industri berprestasi tinggi dan papan RTK berketepatan tinggi terbina dalam mewujudkan saluran dengan platform Qianxun melalui 3G/4G/5G, menghantar maklumat GGA; ke pelayan pembezaan dan menerima isyarat pembezaan pada masa yang sama Selepas menerima maklumat, maklumat lokasi yang tepat dikeluarkan melalui RS232.
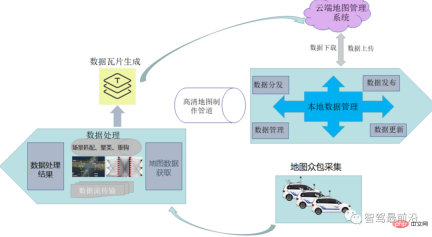
Proses ketepatan tinggi yang paling penting peta Ia termasuk pengumpulan dan pengedaran penyumberan ramai peta. Mengenai pengumpulan data peta sumber ramai, sebenarnya boleh difahami bahawa data jalan raya yang dikumpul oleh pengguna melalui penderia kenderaan pandu sendiri itu sendiri atau perkakasan penderia kos rendah yang lain dihantar ke awan untuk penggabungan data, dan data itu dipertingkatkan melalui ketepatan data untuk melengkapkan penghasilan peta berketepatan tinggi. Keseluruhan proses penyumberan ramai sebenarnya termasuk pelaporan sensor fizikal, pemadanan pemandangan peta, pengelompokan pemandangan, pengesanan perubahan dan kemas kini.
04 Ke manakah seni bina baharu pemanduan autonomi dibangunkan berdasarkan peta
akan dituju?
Seni bina peta berketepatan tinggi semasa sistem pemanduan autonomi masih berorientasikan kepada pendekatan teragih item tumpuan utamanya termasuk koleksi penyumberan ramai peta, analisis maklumat asal peta berketepatan tinggi mengikut kotak peta, dan cara peta menggunakan data Input untuk gabungan, dsb. Mari kita ambil perhatian di sini bahawa seni bina sistem pemanduan autonomi masa depan akan terus berkembang daripada kaedah pembangunan teragih kepada kaedah berpusat. Pendekatan berpusat boleh dilihat dalam tiga atau dua langkah:
Langkah1: Skim kawalan terpusat sepenuhnya untuk domain pemanduan pintar
Iaitu, menyepadukan ADS pemanduan pintar dan parkir pintar Sistem AVP menjalankan kawalan terpusat sepenuhnya dan menggunakan peranti pra-pemprosesan pusat untuk menyepadukan, meramal, merancang dan kaedah pemprosesan lain untuk maklumat yang akan diproses dalam kedua-dua sistem. Kaedah pemprosesan semua unit penderiaan dan data yang berkaitan dengan pemanduan pintar dan tempat letak kenderaan pintar (peta berketepatan tinggi, lidar, kamera teragih sepenuhnya, radar gelombang milimeter, dll.) akan disepadukan ke dalam unit kawalan domain pusat dengan sewajarnya.
Langkah2: Skim kawalan terpusat sepenuhnya untuk domain pemanduan pintar dan domain kokpit pintar
Kaedah ini merupakan peringkat kedua merealisasikan kaedah pengedaran terpusat sepenuhnya, iaitu, domain pemanduan pintar Semua pembangunan fungsian dilindungi oleh pengawal (seperti pemanduan autonomi, tempat letak kenderaan automatik) dan semua pembangunan fungsian dilindungi oleh domain kokpit pintar (termasuk DMS pemantauan pemandu, sistem hiburan audio-visual iHU dan sistem paparan instrumen IP) adalah bersepadu dan dilindungi.
Langkah3: Penyelesaian kawalan terpusat sepenuhnya untuk domain kenderaan pintar
Ini ialah kaedah kawalan bersepadu sepenuhnya yang merangkumi pemanduan pintar, kokpit pintar dan domain casis pintar. Iaitu, tiga fungsi utama disepadukan ke dalam unit kawalan pusat kenderaan, dan pemprosesan kemudian data ini akan mewujudkan lebih banyak keperluan prestasi (kuasa pengkomputeran, lebar jalur, storan, dll.) untuk pengawal domain.
Pembangunan penentududukan peta berketepatan tinggi yang kami bimbangkan di sini akan lebih menjurus kepada kaedah reka bentuk terpusat pada masa hadapan. Kami akan menghuraikan perkara ini.
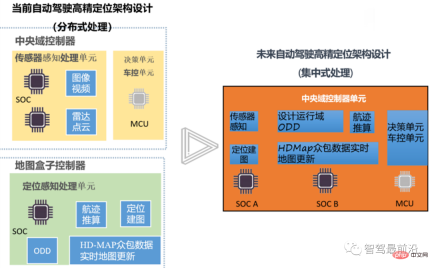
Rajah di atas menunjukkan arah aliran pembangunan seni bina peta berketepatan tinggi dalam kawalan sistem pemanduan autonomi masa hadapan. Pada masa hadapan, sistem pemanduan autonomi akan berusaha untuk menyepadukan unit penderiaan, unit membuat keputusan dan unit penentududukan peta ke dalam unit kawalan domain pusat, bertujuan untuk mengurangkan pergantungan pada kotak peta berketepatan tinggi dari bawah ke atas. Reka bentuk pengawal domainnya mempertimbangkan sepenuhnya penyepaduan penuh SOC cip pengkomputeran AI, MCU cip pengkomputeran logik dan kotak peta ketepatan tinggi.
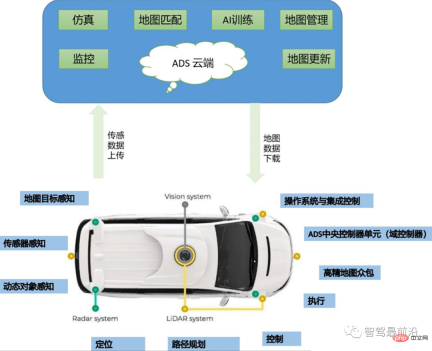
Rajah di atas menunjukkan pengumpulan data penderia peta berketepatan tinggi yang sepadan, pembelajaran data, latihan AI, perkhidmatan peta berketepatan tinggi, simulasi dan perkhidmatan lain di bawah keseluruhan kawalan awan logik. , pada masa yang sama, semasa proses pergerakan dan pengesahan kenderaan, data peta akan dikemas kini secara berterusan melalui penderiaan fizikal, penderiaan data dinamik, penderiaan sasaran peta, kedudukan, perancangan laluan dan kandungan lain, dan OTA akan dimuat naik. ke awan untuk mengemas kini keseluruhan data sumber orang ramai.
Artikel sebelum ini menerangkan proses bagaimana data peta berketepatan tinggi menjana data yang berkaitan yang boleh diproses oleh pengawal pemanduan autonomi Kami tahu bahawa data asal diproses oleh peta berketepatan tinggi ialah data EHP. Data sebenarnya mengandungi sokongan data utama berikut:
1: Menerima maklumat lokasi GPS luaran
2: Maklumat lokasi dipadankan dengan peta; ;
3: Wujudkan maklumat topologi rangkaian jalan; 🎜>5: Gabungan data navigasi separa;
Data secara amnya diproses secara langsung daripada hujung penderiaan HDMap melalui Gigabit Ethernet dan kemudian dimasukkan ke unit pemprosesan pusat peta berketepatan tinggi panggil unit "kotak peta berketepatan tinggi". Melalui pemprosesan selanjutnya data melalui kotak peta (kami akan menerangkan proses pemprosesan sebenar ini secara terperinci dalam artikel seterusnya), ia boleh ditukar kepada data EHR (sebenarnya CanFD) yang boleh diproses oleh pengawal pemanduan autonomi.
Untuk sistem pemanduan autonomi generasi seterusnya, kami komited untuk menyepadukan maklumat peta berketepatan tinggi ke dalam pengawal domain pemanduan autonomi untuk pemprosesan keseluruhan Proses ini bermakna bahawa domain pemanduan autonomi kami pengawal perlu mengambil alih semua kerja penghuraian data yang dilakukan oleh kotak peta, jadi kita perlu menumpukan pada perkara berikut:
1) Sama ada cip AI bagi pemanduan autonomi pengawal domain boleh mengendalikan kelajuan tinggi Semua data penderia yang diperlukan untuk peta yang diperhalusi?
2) Adakah unit operasi logik peta kedudukan berketepatan tinggi mempunyai kuasa pengkomputeran yang mencukupi untuk melaksanakan gabungan maklumat data sensor?
3) Adakah keseluruhan sistem pengendalian asas memenuhi keperluan keselamatan berfungsi?
4) Apakah kaedah sambungan yang digunakan antara cip AI dan cip logik untuk memastikan kebolehpercayaan penghantaran data, Ethernet atau CanFD?
Untuk menjawab soalan di atas, kita perlu menganalisis cara pengawal memproses data peta berketepatan tinggi seperti yang ditunjukkan dalam rajah di bawah.
ialah cip AI bagi sistem pemanduan autonomi Pada masa hadapan pemprosesan data peta berketepatan tinggi, ia bertanggungjawab terutamanya untuk asas pemprosesan data penderia, termasuk data kamera, data Lidar, data gelombang milimeter, dsb. Selain gabungan dan pengelompokan awan titik data asas, kaedah pemprosesan yang digunakan juga termasuk algoritma pembelajaran mendalam yang biasa digunakan, dan teras ARM biasanya digunakan untuk pemprosesan pengkomputeran pusat.
Sebagai unit operasi logik pengawal domain pemanduan autonomi, MCU kemudiannya akan melaksanakan semua pengiraan logik yang diperlukan untuk kotak peta ketepatan tinggi asal. Termasuk pengagregatan vektor bahagian hadapan, kedudukan gabungan sensor, membina peta rangkaian jalan raya, dan yang paling penting, menggantikan fungsi kotak peta asal untuk menukar maklumat EHP kepada isyarat EHR (bagaimana unit pemprosesan pusat MCU boleh menukar maklumat EHP kepada maklumat EHR dengan berkesan Akan terperinci dalam artikel kemudian) dan melaksanakan penghantaran isyarat yang berkesan melalui talian Can. Akhir sekali, AutoBox, unit operasi logik, digunakan untuk perancangan laluan, kawalan membuat keputusan dan operasi lain. 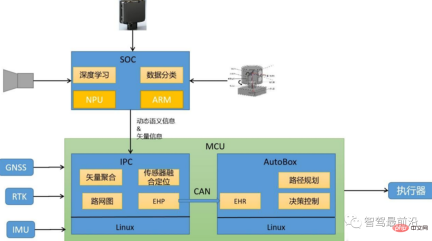
05 Ringkasan
Pemandu autonomi masa hadapan akan cenderung untuk menyepadukan semua maklumat data yang diproses oleh peta berketepatan tinggi dari kotak peta asal ke dalam domain pemanduan autonomi Dalam pengawal, ia bertujuan untuk mewujudkan integrasi pemprosesan pusat yang benar dengan pengawal domain kenderaan sebagai unit bersepadu. Kaedah ini bukan sahaja dapat menjimatkan lebih banyak sumber pengkomputeran, tetapi juga membolehkan algoritma pemprosesan data AI digunakan dengan lebih baik pada kedudukan ketepatan tinggi, memastikan konsistensi pemahaman kedua-duanya tentang alam sekitar. Kita perlu memberi lebih perhatian kepada hala tuju penting integrasi data sensor ketepatan tinggi pada masa hadapan, dan meletakkan lebih banyak usaha ke dalam kuasa pengkomputeran cip, reka bentuk antara muka, reka bentuk lebar jalur dan reka bentuk keselamatan berfungsi.
Atas ialah kandungan terperinci Gambaran keseluruhan elemen teknikal utama dalam pembangunan pemanduan pintar. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!

 Tukar dokumen teks ke matriks TF-IDF dengan TFIDFVectorizerApr 18, 2025 am 10:26 AM
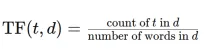
Tukar dokumen teks ke matriks TF-IDF dengan TFIDFVectorizerApr 18, 2025 am 10:26 AMArtikel ini menerangkan teknik frekuensi frekuensi frekuensi (TF-IDF) istilah, alat penting dalam pemprosesan bahasa semulajadi (NLP) untuk menganalisis data teks. TF-IDF melampaui batasan pendekatan asas beg-perkataan dengan berat TE
 Membina Ejen AI Pintar dengan Langchain: Panduan PraktikalApr 18, 2025 am 10:18 AM
Membina Ejen AI Pintar dengan Langchain: Panduan PraktikalApr 18, 2025 am 10:18 AMMelepaskan kuasa ejen AI dengan Langkhain: Panduan Pemula Bayangkan menunjukkan nenek anda keajaiban kecerdasan buatan dengan membiarkannya berbual dengan Chatgpt - kegembiraan di wajahnya sebagai AI dengan mudah terlibat dalam perbualan! Th
 Mistral Besar 2: Cukup kuat untuk mencabar llama 3.1 405b?Apr 18, 2025 am 10:16 AM
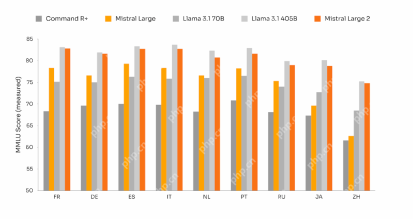
Mistral Besar 2: Cukup kuat untuk mencabar llama 3.1 405b?Apr 18, 2025 am 10:16 AMMistral Besar 2: menyelam mendalam ke dalam sumber terbuka AI yang kuat LLM Pelancaran model keluarga Llama 3.1 baru-baru ini dengan cepat diikuti oleh Mistral AI yang membentangkan model terbesarnya sehingga kini: Mistral Large 2. Paramet 123 bilion ini
 Apakah jadual bunyi dalam penyebaran stabil? - Analytics VidhyaApr 18, 2025 am 10:15 AM
Apakah jadual bunyi dalam penyebaran stabil? - Analytics VidhyaApr 18, 2025 am 10:15 AMMemahami Jadual Bunyi dalam Model Penyebaran: Panduan Komprehensif Pernahkah anda terpesona oleh visual seni digital yang menakjubkan yang dihasilkan oleh AI dan tertanya -tanya tentang mekanik yang mendasari? Elemen utama ialah "Jadual Kebisingan, & Quo
 Bagaimana membina chatbot perbualan dengan GPT-4O? - Analytics VidhyaApr 18, 2025 am 10:06 AM
Bagaimana membina chatbot perbualan dengan GPT-4O? - Analytics VidhyaApr 18, 2025 am 10:06 AMMembina chatbot kontekstual dengan GPT-4O: Panduan Komprehensif Dalam landskap AI dan NLP yang pesat berkembang, chatbots telah menjadi alat yang sangat diperlukan untuk pemaju dan organisasi. Aspek utama untuk mewujudkan sembang yang benar -benar menarik dan cerdas
 Rangka Kerja 7 Teratas untuk Membina Ejen AI pada tahun 2025Apr 18, 2025 am 10:00 AM
Rangka Kerja 7 Teratas untuk Membina Ejen AI pada tahun 2025Apr 18, 2025 am 10:00 AMArtikel ini meneroka tujuh kerangka utama untuk membina ejen AI - entiti perisian autonomi yang melihat, memutuskan, dan bertindak untuk mencapai matlamat. Ejen -ejen ini, melepasi pembelajaran pengukuhan tradisional, memanfaatkan perancangan lanjutan dan alasan
 Apakah perbezaan antara jenis I dan Jenis II? - Analytics VidhyaApr 18, 2025 am 09:48 AM
Apakah perbezaan antara jenis I dan Jenis II? - Analytics VidhyaApr 18, 2025 am 09:48 AMMemahami Kesalahan Jenis I dan Jenis II dalam Ujian Hipotesis Statistik Bayangkan ujian percubaan klinikal menguji ubat tekanan darah baru. Percubaan itu menyimpulkan bahawa dadah dengan ketara menurunkan tekanan darah, tetapi pada hakikatnya, ia tidak. Ini adalah jenis
 Ringkasan Teks Automatik dengan Perpustakaan SumyApr 18, 2025 am 09:37 AM
Ringkasan Teks Automatik dengan Perpustakaan SumyApr 18, 2025 am 09:37 AMSumy: Pembantu Ringkasan AI anda Bosan menyaring dokumen yang tidak berkesudahan? Sumy, perpustakaan Python yang kuat, menawarkan penyelesaian yang diselaraskan untuk ringkasan teks automatik. Artikel ini meneroka keupayaan Sumy, membimbing anda


Alat AI Hot

Undresser.AI Undress
Apl berkuasa AI untuk mencipta foto bogel yang realistik

AI Clothes Remover
Alat AI dalam talian untuk mengeluarkan pakaian daripada foto.

Undress AI Tool
Gambar buka pakaian secara percuma

Clothoff.io
Penyingkiran pakaian AI

AI Hentai Generator
Menjana ai hentai secara percuma.

Artikel Panas
Alat panas

MinGW - GNU Minimalis untuk Windows
Projek ini dalam proses untuk dipindahkan ke osdn.net/projects/mingw, anda boleh terus mengikuti kami di sana. MinGW: Port Windows asli bagi GNU Compiler Collection (GCC), perpustakaan import yang boleh diedarkan secara bebas dan fail pengepala untuk membina aplikasi Windows asli termasuk sambungan kepada masa jalan MSVC untuk menyokong fungsi C99. Semua perisian MinGW boleh dijalankan pada platform Windows 64-bit.

SublimeText3 versi Inggeris
Disyorkan: Versi Win, menyokong gesaan kod!

SublimeText3 versi Cina
Versi Cina, sangat mudah digunakan

Penyesuai Pelayan SAP NetWeaver untuk Eclipse
Integrasikan Eclipse dengan pelayan aplikasi SAP NetWeaver.

PhpStorm versi Mac
Alat pembangunan bersepadu PHP profesional terkini (2018.2.1).

