
Rumah >Peranti teknologi >AI >Analisis mendalam teknologi casis kawalan wayar untuk kereta bersambung pintar
Analisis mendalam teknologi casis kawalan wayar untuk kereta bersambung pintar

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2023-05-02 11:28:063369semak imbas
| kawalan penghantaran, menggantikan sistem mekanikal tradisional atau sistem hidraulik, dan mengawal secara langsung penggerak dengan isyarat elektrik untuk mencapai tujuan kawalan Prinsip asas ditunjukkan dalam Rajah 1.
Teknologi ini berasal dari pesawat Fly by Wire yang dilancarkan oleh Pentadbiran Aeronautik dan Angkasa Lepas Kebangsaan (NASA) pada tahun 1972.
Di mana "X" adalah seperti nombor yang tidak diketahui dalam persamaan matematik, mewakili pelbagai komponen dan operasi berkaitan dalam kereta yang dikawal secara tradisional secara mekanikal atau hidraulik.
Rajah 1 Gambarajah skematik asas teknologi kawalan talian
Oleh kerana sistem kawalan wayar membatalkan sambungan pneumatik, hidraulik dan mekanikal tradisional dan menggantikannya dengan penderia, unit kawalan dan penggerak elektromagnet, ia mempunyai kelebihan keselamatan, tindak balas pantas, kos penyelenggaraan yang rendah, dan pemasangan yang mudah dan pantas. ujian.
Teknologi kawalan wayar rangkaian pintar terutamanya termasuk teknologi stereng kawalan wayar, teknologi brek kawalan wayar, teknologi pemacu kawalan wayar, teknologi anjakan kawalan wayar dan teknologi suspensi kawalan wayar, dll.02 Pengetahuan tentang sistem steer-by-wire
Pengenalan kepada sistem steer-by-wire
Steering By Wire (SBW) ialah teknologi utama yang diperlukan untuk kenderaan bersambung pintar untuk mencapai pengesanan laluan dan pengelakan halangan secara langsung menjejaskan keselamatan aktif dan pengalaman memandu.
Sistem stereng demi wayar membatalkan peranti stereng mekanikal tradisional Tiada sambungan mekanikal antara stereng dan stereng, yang boleh mengurangkan berat badan kenderaan. menghapuskan kesan jalan, dan mengurangkan bunyi bising Dan pengasingan kejutan dan kelebihan lain.Penyelidikan mengenai sistem steer-by-wire bermula agak awal di luar negara.
Syarikat kereta terkenal dan pengeluar alat ganti kereta, seperti Syarikat Delphi Amerika, Syarikat TRW, Syarikat Mitsubishi Jepun, Syarikat ZF, Syarikat BMW, dll. semuanya sedang membangunkan sistem SBW mereka sendiri.
Syarikat TRW mula-mula mencadangkan menggunakan isyarat kawalan untuk menggantikan sambungan mekanikal antara stereng dan stereng.
Walau bagaimanapun, disebabkan teknologi kawalan elektronik, barulah pada tahun 1990-an teknologi steer-by-wire mencapai kemajuan yang ketara.
Infiniti "Q50" menjadi model pertama yang dikeluarkan secara besar-besaran yang menggunakan teknologi steer-by-wire.
Pada tahun 2017, Nexteer telah membangunkan sistem stereng dengan wayar yang terdiri daripada "sistem stereng senyap" dan "sistem stereng atas permintaan" yang boleh Steering, stereng boleh kekal pegun semasa pemanduan autonomi dan boleh ditarik balik ke kelompok instrumen untuk menyediakan ruang dalaman yang lebih besar.
Penyelidikan mengenai kereta kawalan wayar oleh perusahaan domestik bermula agak lewat, dan terdapat jurang yang besar dengan negara asing Penyelidikan mengenai sistem kawalan wayar di pelbagai universiti adalah berdasarkan teori.
Pada tahun 2004, Universiti Tongji telah menunjukkan kenderaan elektrik mikro pacuan bebas empat roda "Chunhui No. 3" yang dilengkapi dengan sistem steer-by-wire di Ekspo Perindustrian Antarabangsa Shanghai, sebagai ditunjukkan dalam Rajah 2.
Rajah 2 Kenderaan elektrik steer-by-wire Chunhui No. 3 
Struktur sistem steer-by-wire
Sistem steering-by-wire terutamanya terdiri daripada tiga bahagian utama: modul stereng , modul pelaksanaan stereng dan ECU, serta pencegahan automatik Ia terdiri daripada modul tambahan seperti sistem kerosakan dan sistem bekalan kuasa, seperti yang ditunjukkan dalam Rajah 3.

Rajah 3 Gambar rajah struktur sistem stereng dengan wayar
Roda Stereng Modul ini termasuk stereng, sensor sudut roda stereng dan motor tork.
Fungsi utamanya adalah untuk menukar niat stereng pemandu dengan mengukur sudut stereng menjadi isyarat digital dan menghantarnya kepada pengawal utama pada masa yang sama, ia menerima isyarat tork dihantar oleh ECU untuk menjana stereng Tork pengembalian memberikan pemandu isyarat rasa jalan yang sepadan.
Modul pelaksanaan stereng termasuk penderia sudut stereng, motor pelaksana stereng, pengawal motor stereng dan komponen stereng roda hadapan Fungsi utamanya ialah menerima arahan daripada ECU dan kawalan motor stereng untuk mencapai stereng roda hadapan yang diperlukan Sudut pusingan roda memenuhi niat pemanduan.
ECU menganalisis dan memproses isyarat yang dikumpul, menentukan keadaan pergerakan kereta, menghantar arahan kepada motor tork dan motor pelaksana stereng, dan mengawal kerja kedua-dua motor mereka, motor eksekusi stereng melengkapkan kenderaan Untuk mengawal sudut arah, motor tork mensimulasikan tork belakang stereng untuk memastikan pengalaman pemanduan pemandu.
Sistem bekalan kuasa bertanggungjawab untuk bekalan kuasa pengawal, motor eksekutif dan motor kenderaan lain untuk memastikan grid kuasa berfungsi dengan stabil di bawah beban berat.
Sistem selamat gagal automatik memastikan keselamatan berlebihan apabila sistem stereng kawalan wayar gagal.
Ia termasuk siri algoritma pemantauan dan pelaksanaan untuk mengendalikan bentuk dan tahap kerosakan yang berbeza dengan sewajarnya, untuk memaksimumkan pemanduan biasa kereta.
Apabila kerosakan dikesan dalam komponen utama seperti ECU dan motor penggerak stereng, ECU pengendalian kerosakan secara automatik mula-mula, ia mengeluarkan arahan untuk melumpuhkan sepenuhnya ECU dan motor penggerak stereng, dan kedua, kerosakan diaktifkan dalam keadaan kecemasan Jalankan motor untuk memastikan kawalan yang selamat ke arah arah kenderaan.
Sistem stereng-dengan-wayar Infiniti Q50
Kemudian melalui lajur stereng tradisional Cakera dan penggerak stereng disambungkan bersama Bentuk asas adalah sama seperti kenderaan bahan api biasa, tetapi klac berbilang plat yang dikawal secara elektronik disambungkan di antara lajur stereng dan penggerak stereng.
Seperti yang ditunjukkan dalam Rajah 4 di bawah.

Rajah 4 Infiniti Q50 sistem stereng melalui wayar
Semasa pemanduan biasa, klac berbilang plat diputuskan Walaupun tiang stereng masih wujud, ia tidak memberi kesan langsung pada roda hadapan.
Hanya dalam keadaan kecemasan di mana mekanisme stereng kawalan wayar gagal, klac berbilang plat disambungkan secara automatik, dan sambungan tegar antara stereng, lajur stereng dan mekanisme stereng ( mekanisme rak dan pinion) merealisasikan operasi stereng untuk memastikan keselamatan pemanduan.
Sistem stereng dengan wayar Bosch
Bosch Sistem ini sangat berbeza daripada sistem stereng demi wayar Infiniti Q50 Sistem stereng demi wayar yang dibangunkan oleh Bosch menghapuskan sepenuhnya lajur stereng dan terdiri daripada sistem stereng atas yang terdiri daripada penggerak stereng atas SWA dan satu. penggerak stereng bawah yang berlebihan sepenuhnya Ia terdiri daripada sistem stereng bawah yang terdiri daripada SRA, dan tiada sambungan tegar antara sistem stereng atas dan sistem stereng bawah. Seperti yang ditunjukkan dalam Rajah 5 di bawah.
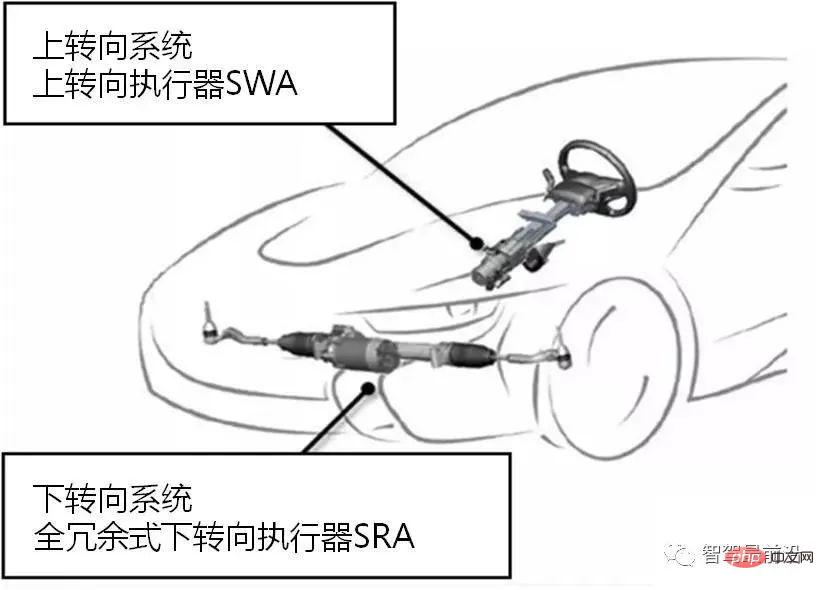
Rajah 5 Sistem stereng dengan wayar Bosch
Cara sistem stereng demi wayar berfungsi
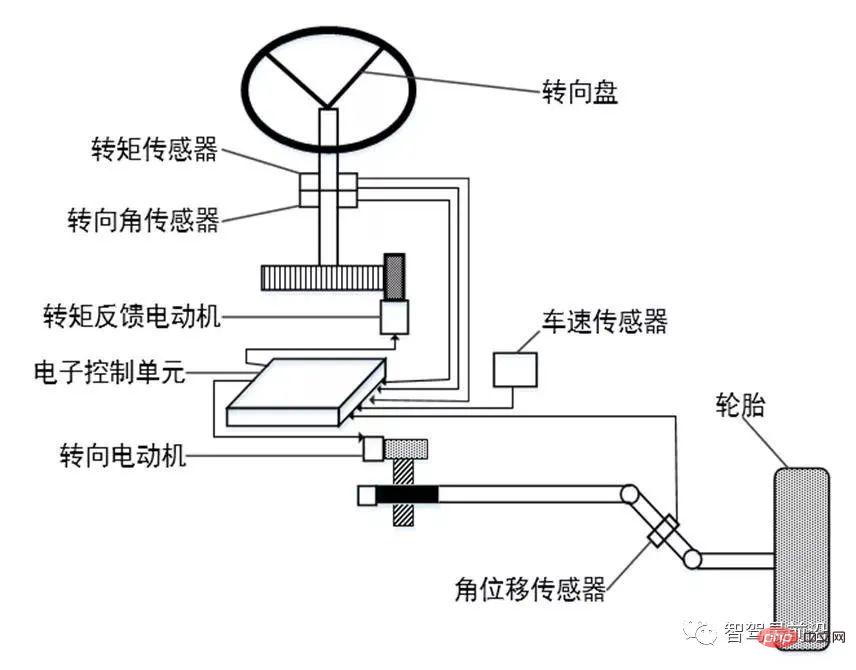
Rajah 6 Gambar rajah prinsip kerja sistem steer-by-wire
Seperti yang ditunjukkan dalam rajah Seperti yang ditunjukkan dalam 6, prinsip kerja sistem stereng-dengan-wayar ialah: apabila stereng berputar, penderia tork stereng dan penderia sudut stereng menukar tork pemandu yang diukur dan sudut stereng menjadi isyarat elektrik dan masukkannya ke unit kawalan elektronik ECU, ECU mengawal arah putaran motor maklum balas tork berdasarkan isyarat daripada sensor kelajuan kenderaan dan sensor anjakan sudut yang dipasang pada mekanisme penghantaran stereng, dan menjana tork maklum balas berdasarkan simulasi daya stereng, sambil mengawal arah putaran dan saiz tork motor stereng Dan sudut putaran, kedudukan stereng stereng dikawal oleh peranti stereng mekanikal, supaya kereta boleh memandu sepanjang trajektori yang diharapkan oleh pemandu. .
Ringkasan Pembelajaran
1. Sistem kemudi demi wayar membatalkan beberapa peranti stering mekanikal tradisional dan stereng roda Tiada sambungan mekanikal dengan stereng, yang boleh mengurangkan berat badan kenderaan, menghilangkan kesan jalan raya, dan mempunyai kelebihan mengurangkan bunyi dan mengasingkan getaran.
2 Sistem stereng kawalan wayar terutamanya terdiri daripada tiga bahagian utama: modul stereng, modul pelaksanaan stereng dan ECU, serta modul tambahan seperti sistem selamat gagal automatik dan bekalan kuasa.
03 Pengetahuan tentang sistem pemacu demi wayar
Pengenalan kepada sistem pemacu demi wayar
Drive By Wire (DBW) ialah teknologi utama yang diperlukan untuk merealisasikan kereta bersambung pintar Ia menyediakan asas perkakasan yang baik untuk kereta bersambung pintar untuk merealisasikan pemanduan autonomi. by-wire atau pendikit dikawal secara elektronik (Pendikit oleh Wayar).
Enjin menggunakan abah-abah pendawaian dan bukannya kabel atau rod pengikat, dan motor pemacu dipasang pada bahagian pendikit untuk memacu pendikit untuk menukar bukaan mengikut pelbagai maklumat pemanduan kereta, campuran minyak dan gas yang memasuki silinder dilaraskan dengan tepat, memperbaiki keadaan pembakaran enjin, dan meningkatkan kuasa dan ekonomi kereta.
Selain itu, sistem pandu-dengan-wayar boleh menjadikan kereta lebih mudah untuk melaksanakan fungsi seperti pelayaran berkelajuan tetap dan pelayaran adaptif.
Struktur sistem pemacu demi wayar
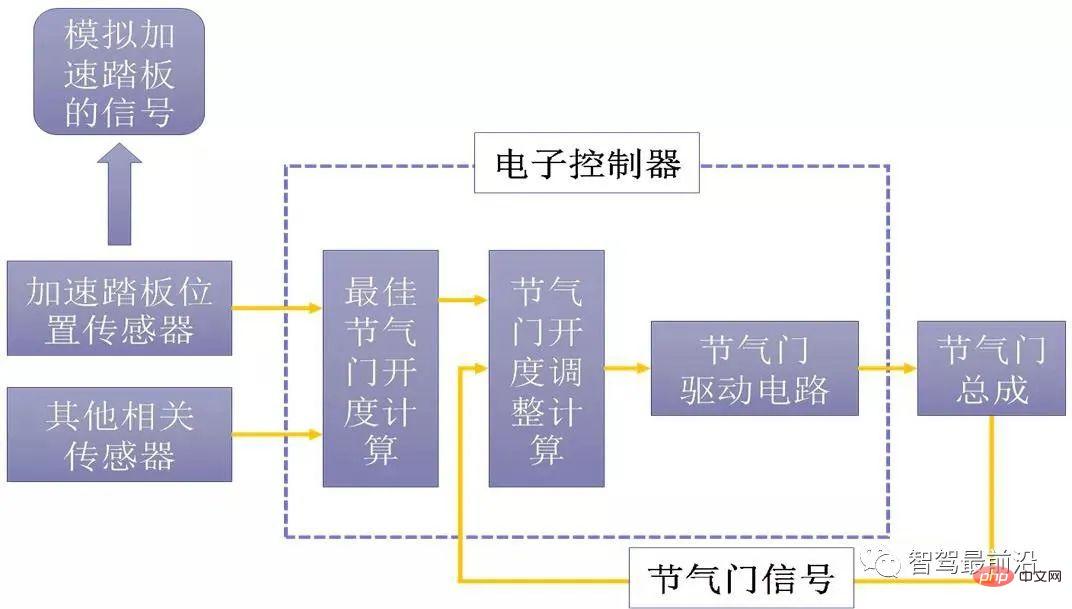
Pemandu demi wayar sistem pendikit terutamanya terdiri daripada pedal pemecut, penderia kedudukan pedal pemecut, ECU, bas data, motor servo dan penggerak pedal pemecut.
Sistem ini menghapuskan struktur mekanikal antara pedal pemecut dan injap pendikit dan mengesan anjakan mutlak pedal pemecut melalui penderia kedudukan pedal pemecut.
Selepas ECU mengira bukaan pendikit optimum, ia mengeluarkan arahan untuk memacu motor untuk mengawal pendikit bagi mengekalkan bukaan optimum. Seperti yang ditunjukkan dalam Rajah 7 di bawah.
Rajah 7 Diagram skematik struktur sistem pemacu wayar
Kategori sistem pandu-dengan-wayar
Pada masa ini, memadankan dua jenis utama kereta bersambung pintar, sistem pandu-dengan-wayar dibahagikan ke dalam talian kereta tradisional Terdapat dua jenis: pandu kawalan dan kenderaan elektrik pandu-dengan-wayar.
Sistem pandu dengan wayar kereta tradisional
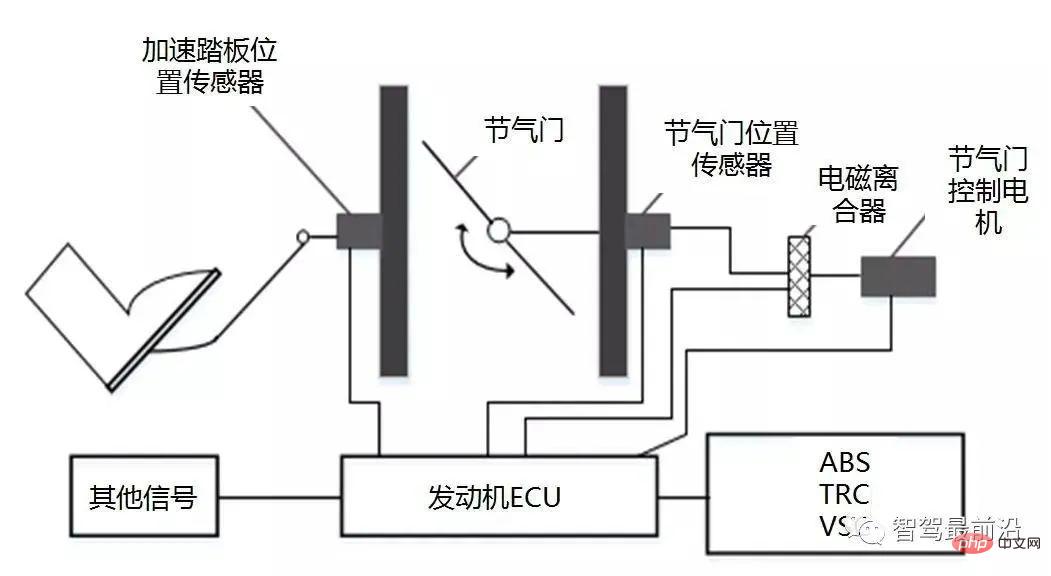
Untuk kereta tradisional, kawalan automatik pedal pemecut adalah kunci untuk merealisasikan pemanduan dengan wayar, seperti yang ditunjukkan dalam Rajah 8. Terdapat dua cara.
Rajah 8 Kawalan gambarajah skematik sistem pandu dengan wayar kereta tradisional
方式一 |
在加速踏板的位置增加一套执行机构,去模拟驾驶员踩加速踏板。同时还要增加一同闭环负反馈控制系统,输入是目标车速信号,实际车速作为反馈。通过控制系统计算,去控制执行机构具体动作(图9) |
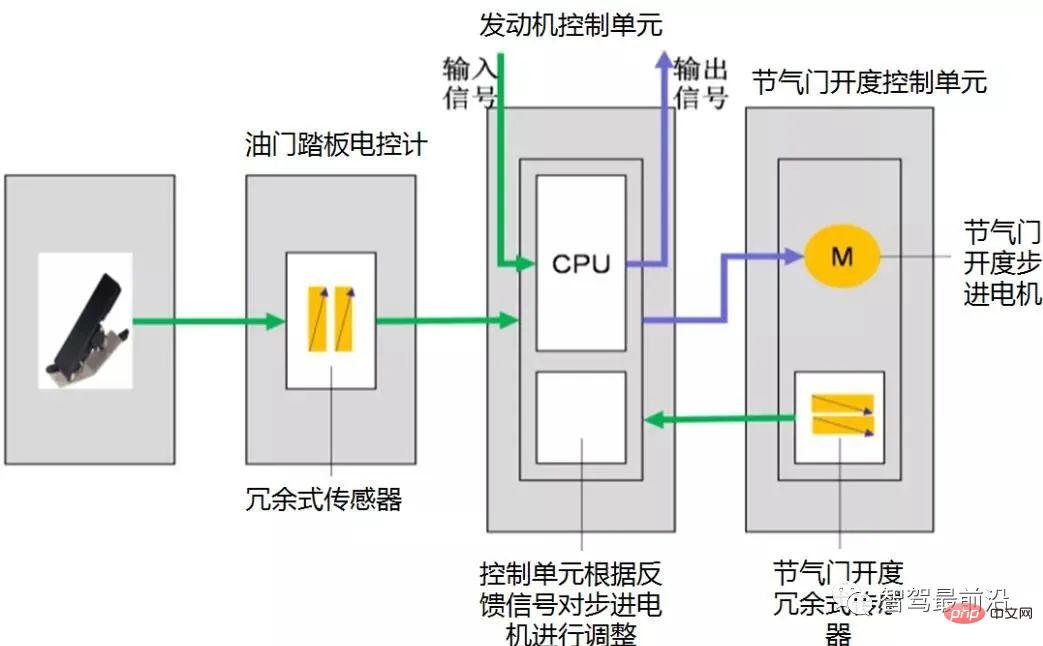
方式二 |
接管节气门控制单元加速踏板的位置信号,只需要增加一套控制系统,输入目标车速信号,把实际的车速作为反馈,最后控制系统计算输出加速踏板位置信号给节气门控制单元。 |
Rajah 9 Rajah kaedah kawalan sistem pandu-dengan-wayar kereta tradisional
Sistem pemanduan wayar kenderaan elektrik
Seperti yang ditunjukkan dalam Rajah 10 di bawah, perlu kepada unit kawalan kenderaan elektrik Fungsi utama (VCU) adalah untuk mengira permintaan tork dengan menerima isyarat kelajuan kenderaan, isyarat pecutan dan isyarat anjakan pedal pemecut, dan kemudian menghantar arahan tork kepada unit kawalan motor untuk mengawal tork motor. , jadi melalui unit kawalan kenderaan VCU Antara muka kawalan kelajuan digunakan untuk merealisasikan kawalan pemacu wayar.
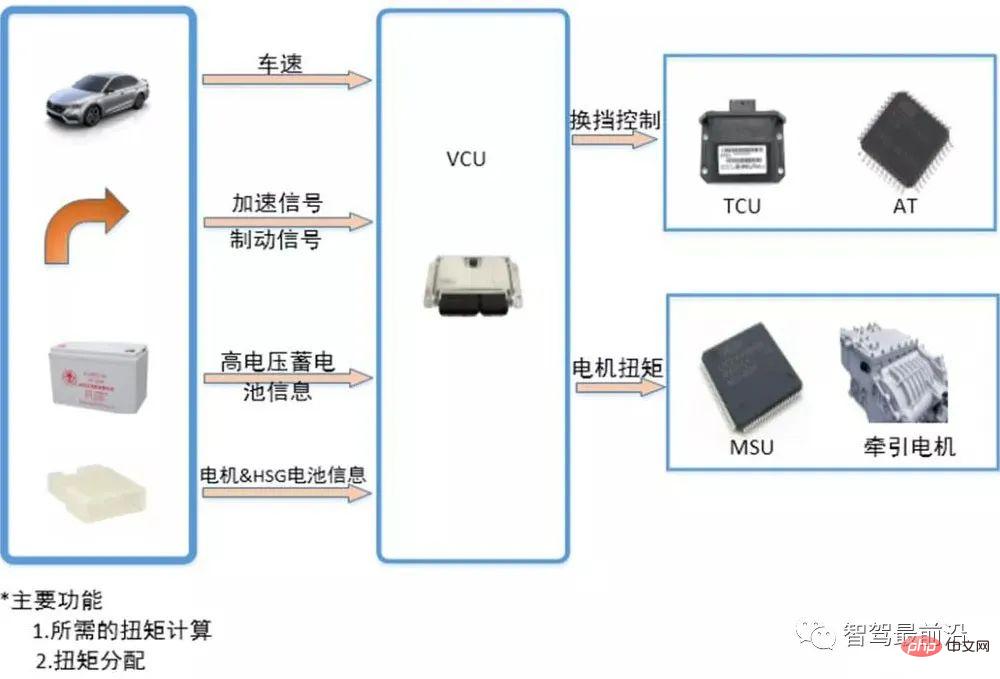
Rajah 10 Rajah 10 Kawalan gambarajah skematik sistem pandu-demi-wayar kenderaan elektrik
Ringkasan Pembelajaran
1 , dan ia membolehkan kereta bersambung pintar mencapai autonomi Pemanduan menyediakan asas perkakasan yang baik, juga dipanggil pendikit kawalan wayar atau pendikit dikawal secara elektronik.
2. Sistem pemacu dengan wayar terutamanya terdiri daripada pedal pemecut, penderia kedudukan pedal pemecut, ECU, bas data, motor servo dan penggerak pedal pemecut.
3. Bergantung pada jenis kereta, sistem pandu-dengan-wayar dibahagikan kepada dua jenis: pandu-dengan-wayar kereta tradisional dan pandu-dengan-wayar kereta elektrik.
04 Pengetahuan tentang sistem brek demi wayar
Pengenalan kepada sistem brek demi wayar
Brake by Wire (BBW) adalah teknologi utama yang diperlukan untuk "lapisan pelaksanaan kawalan" kenderaan rangkaian pintar adalah alat penting untuk merealisasikan tempat letak kenderaan automatik termaju Salah satu komponen utama pemanduan.
Ia menukar isyarat mekanikal pedal brek kepada isyarat kawalan elektronik melalui pengubahsuaian Ia menerima niat brek pemandu melalui sensor kedudukan pedal pemecut dan menjana isyarat kawalan brek elektronik disalurkan kepada sistem kawalan dan penggerak, dan perasaan mengayuh disimulasikan dan disalurkan semula kepada pemandu mengikut algoritma tertentu.
Perbezaan antara sistem brek tradisional dan sistem brek demi wayar ditunjukkan dalam Rajah 11. Aplikasi teknologi brek demi wayar dalam kereta lumba F1 adalah sangat matang, tetapi disebabkan kos dan masalah teknikal, ia tidak dipopularkan dalam kereta penumpang.
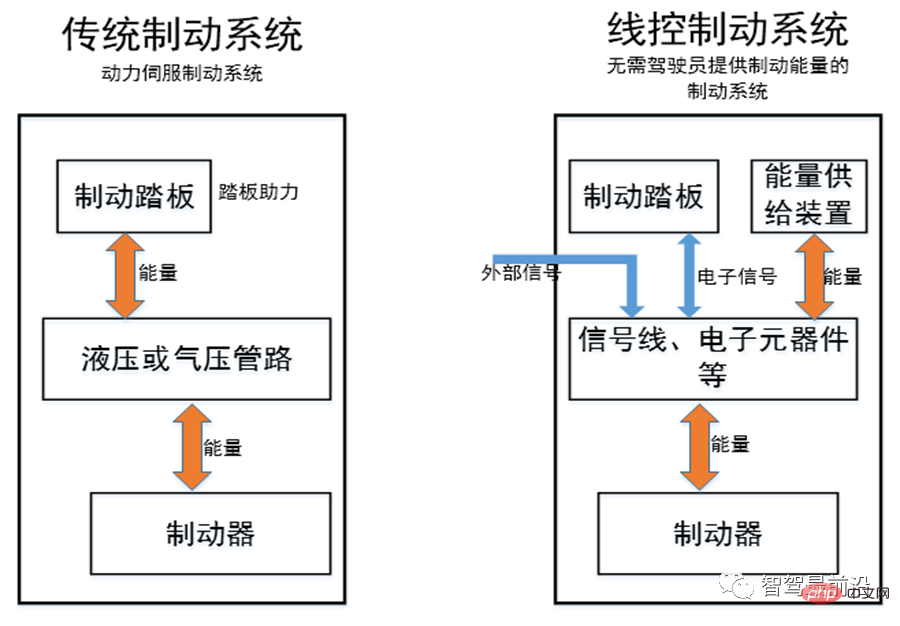
Rajah 11 Perbezaan antara sistem brek tradisional dan sistem brek demi wayar
BMW M3 awal menggunakan sistem brek demi wayar.
Memandangkan sistem brek dengan wayar dikawal melalui ECU, kebolehpercayaan, anti-gangguan, toleransi kerosakan ECU dan komunikasi masa nyata antara pelbagai sistem kawalan mungkin mempunyai impak pada sistem brek mempunyai kesan dan menyekat penggunaan dan promosi sistem brek dengan wayar.
Klasifikasi, komposisi dan prinsip sistem brek demi wayar
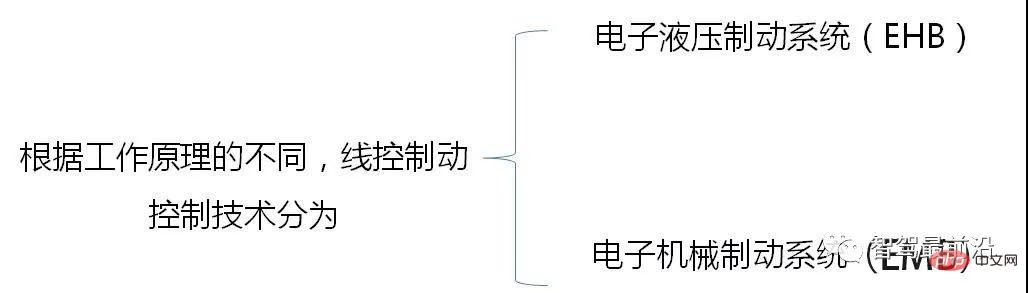
Rajah 12 Klasifikasi teknologi kawalan brek demi wayar
Sistem brek hidraulik elektronik EHB
Sistem brek hidraulik elektronik EHB, singkatan Brek Hidraulik Elektronik, dibangunkan daripada sistem brek hidraulik tradisional.
Tetapi perbezaan daripada kaedah brek tradisional ialah EHB menggantikan beberapa komponen mekanikal asal dengan komponen elektronik dan menggabungkan sistem elektronik dengan sistem hidraulik Ia adalah sistem bersepadu elektromekanikal dan hidraulik penggerak disusun secara berpusat.
Oleh kerana cecair brek digunakan sebagai medium untuk menghantar daya brek, ia juga dipanggil sistem brek basah berpusat.
EHB terutamanya terdiri daripada pedal elektronik, unit kawalan elektronik (ECU), penggerak hidraulik dan bahagian lain.
Pedal elektronik terdiri daripada pedal brek dan sensor pedal (sensor anjakan pedal).
Penderia kedudukan pedal pemecut digunakan untuk mengesan lejang pedal, dan kemudian menukar isyarat anjakan kepada isyarat elektrik dan menghantarnya ke ECU untuk merealisasikan peraturan berkadar bagi lejang pedal dan daya brek. Seperti yang ditunjukkan dalam Rajah 13.
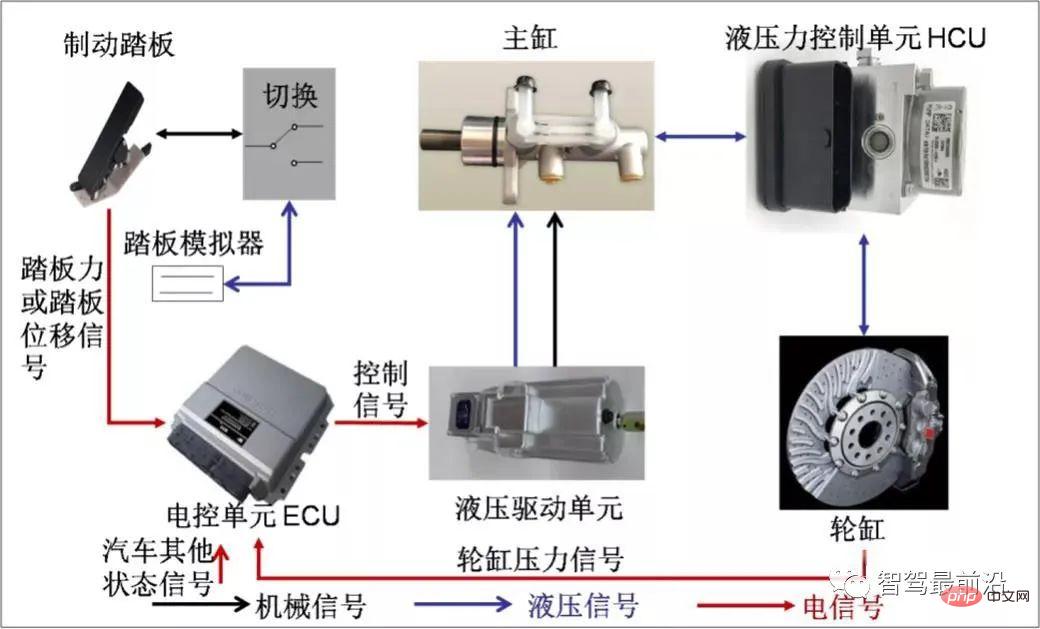
Rajah 13 Rajah struktur sistem brek elektro-hidraulik (EHB)
Apabila beroperasi seperti biasa, sambungan hidraulik antara pedal brek dan brek diputuskan dan injap sandaran ditutup. ECU menentukan niat brek pemandu melalui isyarat sensor dan memacu pam hidraulik melalui motor untuk brek. Apabila sistem elektronik gagal, injap sandaran terbuka dan EHB menjadi sistem hidraulik konvensional. Selepas isyarat input pedal brek memacu cecair brek dalam silinder induk brek untuk mengalir ke dalam silinder roda brek yang disambungkan kepada setiap brek roda melalui injap sandaran, memasuki mod brek sistem hidraulik konvensional untuk memastikan keselamatan brek kenderaan yang diperlukan.
EHB boleh menyepadukan modul berfungsi seperti ABS (sistem brek anti-kunci), ESP (sistem kestabilan elektronik), TCS (sistem kawalan tarikan) melalui perisian, yang boleh meningkatkan lagi keselamatan pemanduan dan keselesaan. Apabila brek dihadam ke dalam air, sistem EHB boleh memulihkan kekeringan brek melalui tindakan brek yang sesuai dan mengekalkan prestasi kerja brek.
Berbanding dengan sistem brek hidraulik atau pneumatik tradisional, sistem EHB meningkatkan keselamatan sistem brek, membolehkan kenderaan membrek apabila sistem brek demi wayar gagal. Walau bagaimanapun, sistem sandaran masih mengandungi saluran paip penghantaran bendalir brek yang kompleks, jadi EHB tidak sepenuhnya mempunyai kelebihan sistem brek demi wayar.
Sistem brek mekanikal elektronik EMB
Elektronik sistem brek mekanikal EMB (Electronic Mechanical Brake) adalah berdasarkan konsep reka bentuk serba baharu yang meninggalkan sepenuhnya cecair brek dan saluran paip hidraulik sistem brek tradisional Ia digerakkan oleh motor untuk menjana daya brek, dan brek dipasang setiap roda. Brek elektromekanikal yang boleh berfungsi secara bebas juga dipanggil sistem brek kering teragih. Sistem EMB terutamanya terdiri daripada brek elektromekanikal, ECU dan penderia, seperti yang ditunjukkan dalam Rajah 14.
EMB mempunyai struktur yang sangat ringkas dan padat Susun atur, pemasangan dan penyelenggaraan sistem brek pada masa yang sama, disebabkan oleh pengurangan beberapa bahagian brek berat sistem dikurangkan dengan banyak, menjadikannya lebih Kelebihan yang ketara ialah dengan penyingkiran cecair brek, penggunaan, persekitaran kerja dan penyelenggaraan casis kereta bertambah baik.
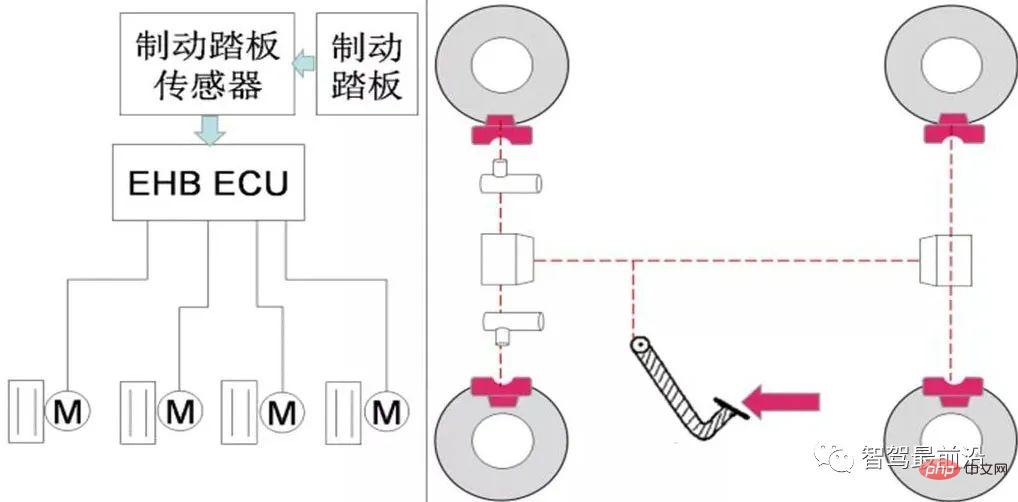
Rajah 14 rajah struktur EMB
Apabila EMB berfungsi, ECU unit kawalan brek menerima isyarat lejang pedal daripada pedal brek ECU mengira isyarat kelajuan pedal brek dan menggabungkannya dengan isyarat elektrik lain seperti kelajuan dan pecutan kenderaan untuk menjelaskan status pemanduan. kereta dan menganalisis setiap roda Mengikut permintaan brek pada setiap roda, tork brek optimum bagi setiap roda dikira dan isyarat kawalan yang sepadan dikeluarkan untuk masing-masing mengawal saiz semasa dan sudut putaran motor yang berfungsi dalam brek elektromekanikal. setiap roda. Melalui nyahpecutan dalam brek elektromekanikal, tork dan arah gerakan ditukar, dan putaran motor ditukar kepada pengapit blok caliper brek untuk menjana tork geseran brek yang mencukupi.
Salah satu komponen utama sistem EMB ialah brek elektromekanikal, yang mengubah magnitud dan arah arus keluaran melalui ECU untuk menukar tork dan arah pergerakan motor, dan menukarkan putaran aci motor ke dalam blok caliper brek Membuka dan menutup, mekanisme atau algoritma kawalan yang sepadan digunakan untuk mengimbangi perubahan dalam pelepasan brek yang disebabkan oleh kehausan plat geseran. Mengikut ciri struktur dan prinsip kerjanya, brek elektromekanikal boleh dibahagikan kepada dua kategori: brek bukan tambah sendiri dan brek tambah sendiri.
Tiada brek bertenaga sendiri: Motor elektrik menghasilkan daya pengapit yang bertindak pada cakera brek melalui penggerak mekanikal yang memperlahankan dan meningkatkan daya kilas brek adalah antara cakera brek dan plat geseran. Tekanan dan pekali geseran berkorelasi secara linear dengan mengawal sudut putaran aci motor pemacu, sistem kawalan adalah agak mudah, dan prestasi kerja brek adalah stabil , keperluan kuasa motor adalah tinggi, jadi saiznya agak besar, seperti yang ditunjukkan dalam Rajah 15.

Rajah 15 Gambarajah struktur brek tidak bertenaga sendiri
Brek bertenaga sendiri: Tambah baji di antara cakera brek dan blok angkup brek Apabila brek berfungsi, geseran cakera brek menyebabkan baji terus terjepit ke dalam cakera brek dan blok kaliper brek. . , meningkatkan daya pengapit, dengan itu menghasilkan kesan daya yang meningkat sendiri dan prestasi brek yang lebih kuat. Kuasa motor sistem ini adalah kecil, dan isipadu dan berat peranti juga kecil Walau bagaimanapun, kecekapan breknya bergantung pada keadaan kerja baji Oleh itu, teknologi dan ketepatan baji adalah sangat tinggi. ia sukar diproses, dan breknya stabil. Seksualiti agak lemah dan sukar dikawal. Seperti yang ditunjukkan dalam Rajah 16.
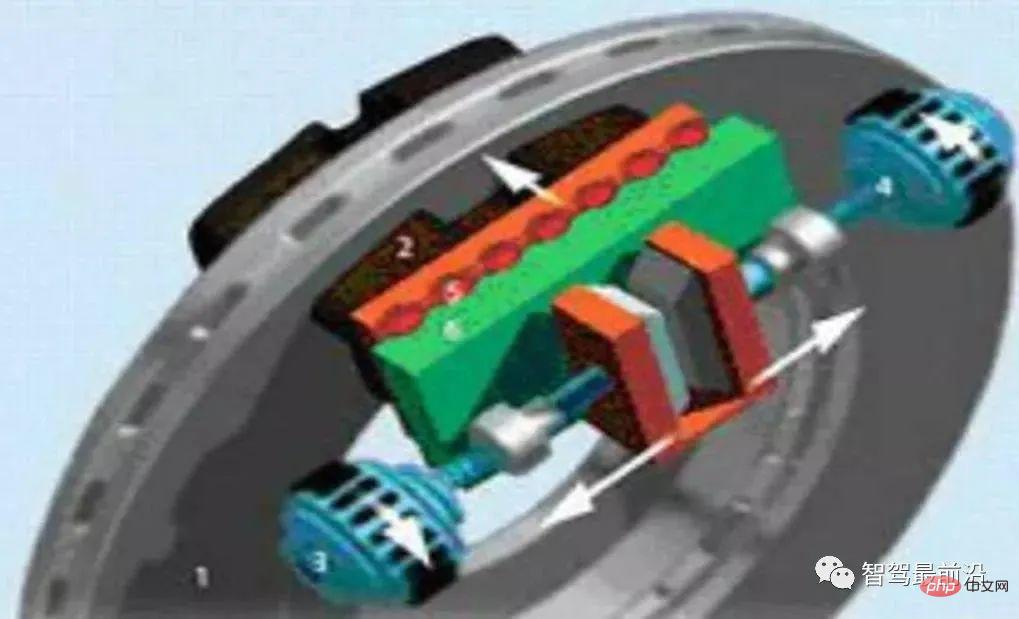
Rajah 16 Rajah struktur brek bertenaga sendiri
Berbanding dengan EHB, tiada bahagian pemacu hidraulik dalam EMB Kelajuan tindak balas sistem adalah lebih tinggi, dan kestabilan dan kebolehpercayaan kerja lebih baik Namun, kerana ia dikawal sepenuhnya oleh wayar, tiada brek sandaran sistem, jadi ia Kebolehpercayaan kerja sistem dan keperluan toleransi kesalahan adalah lebih tinggi. Di samping itu, penggunaan isyarat elektrik untuk mengawal pemacu motor memendekkan masa tindak balas sistem brek Pada masa yang sama, perkongsian isyarat sensor dan penyepaduan sistem brek dan fungsi modul lain memudahkan kawalan yang menyeluruh dan menyeluruh. keadaan memandu kereta, menambah baik meningkatkan keselamatan memandu kereta.
Ciri-ciri sistem brek demi wayar
1) Memandangkan EHB menggunakan tekanan hidraulik sebagai sumber tenaga kawalan , penjanaan tekanan hidraulik Ia agak sukar untuk dikawal secara elektronik, dan tidak mudah untuk disepadukan dengan sistem kawalan elektronik lain, dan kerumitan sistem hidraulik memudaratkan ringan sistem; 🎜>2) Teknologi EMB Kelebihan keselamatan adalah sangat luar biasa. Tindak balas brek adalah pantas. Tiada mekanisme penghantaran tekanan hidraulik atau pneumatik yang rumit . Masa tindak balas adalah dalam 100 ms, sangat memendekkan jarak brek, dan dengan itu Meningkatkan keselamatan
3) Sistem brek demi wayar tidak mempunyai getaran lantunan dalam mod ABS dan boleh; menghilangkan kesunyian;
4) Dawai Sistem brek kawalan memudahkan penyepaduan fungsi tambahan seperti tempat letak kereta elektronik, brek anti-kunci, dan pengagihan daya brek
5) Persekitaran kerja keras, terutamanya suhu tinggi di bawah brek berkelajuan tinggi. Suhu pad brek mencecah beberapa ratus darjah dan getarannya tinggi, yang menyekat reka bentuk komponen EMB sedia ada.
Ringkasan Pembelajaran
1 asal Isyarat mekanikal pedal brek digantikan dengan isyarat elektrik penderia kedudukan pedal pemecut, yang digunakan untuk menerima niat brek pemandu, menjana isyarat brek elektrik dan menghantarnya ke sistem kawalan dan penggerak, dan mensimulasikan pengayuh. perasaan mengikut algoritma tertentu dan maklum balas kepada pemandu.
2 Mengikut prinsip kerja yang berbeza, teknologi kawalan brek demi wayar dibahagikan kepada dua jenis: sistem brek elektro-hidraulik (EHB) dan sistem brek elektro-mekanikal (EMB) .
3. EHB ialah singkatan dari Electronic Hydraulic Brake Ia dibangunkan daripada sistem brek hidraulik tradisional, tetapi ia sangat berbeza daripada kawalan kaedah brek tradisional EHB menggantikan sistem brek asal dengan komponen elektronik. Sesetengah komponen mekanikal menggabungkan sistem elektronik dan sistem hidraulik, membentuk sistem penyepaduan elektromekanikal dan hidraulik yang canggih, dengan unit kawalan dan penggerak disusun secara agak terpusat.
Disebabkan penggunaan cecair brek sebagai medium untuk menghantar daya brek, ia juga dipanggil sistem brek basah berpusat.
4. EMB, singkatan kepada Electronic Mechanical Brake, adalah berdasarkan konsep reka bentuk serba baharu yang meninggalkan sepenuhnya cecair brek dan saluran paip hidraulik sistem brek tradisional menjana daya brek, dan setiap roda dilengkapi dengan brek elektromekanikal yang boleh berfungsi secara bebas, juga dikenali sebagai sistem brek kering teragih.
05 Pengetahuan tentang sistem anjakan demi wayar
Pengenalan kepada sistem anjakan demi wayar
Shift By Wire (SBW) ialah sistem elektronik yang membatalkan sepenuhnya struktur sambungan mekanikal antara gear sedia ada dan transmisi dan mengawal tindakan penghantaran melalui perlaksanaan Shift By Wire Peralihan gear sistem menggantikan mod operasi gear tradisional dan mengawal peralihan gear kenderaan secara elektronik melalui komponen interaktif baharu seperti tombol dan butang Ia menyediakan asas perkakasan yang baik untuk kawalan kelajuan kenderaan bersambung pintar, juga dikenali sebagai peralihan gear elektronik.
Anjakan demi wayar menghilangkan kabel atau rod tolak yang menyambungkan mekanisme kawalan anjakan tradisional dan penghantaran Tiada sambungan mekanikal langsung antara tuas anjakan dan transmisi, yang boleh memudahkan Struktur separa sistem memudahkan reka bentuk kedudukan dan antara muka operasi tuil anjakan (contohnya, dipasang pada papan pemuka), menjadikan operasi peralihan lebih ringan dan lebih mudah.
Syarikat BMW Motor adalah yang pertama memperkenalkan sistem anjakan demi wayar bersempena transmisi dwi klac tujuh kelajuan MDKG, menjadikan aksi peralihan pemandu mudah, mudah dan mudah. . Masalah gear P letak kereta tersekat, dan ia digunakan secara meluas dalam semua siri model BMW Group.

Rajah 17 BMW shift-by-wire system tuil gear
Sistem shift-by-wire terutamanya terdiri daripada mekanisme operasi syif, ECU syif, modul pelaksanaan syif, ECU kawalan letak kereta dan penunjuk gear.
Sistem shift-by-wire model hibrid Toyota
Seperti yang ditunjukkan dalam Rajah 18 Gambar rajah struktur sistem anjakan demi wayar model hibrid Toyota, yang terdiri daripada tuil gear, suis letak kereta, sistem hibrid HV ECU, ECU kawalan letak kereta, penggerak letak kereta dan penunjuk gear.
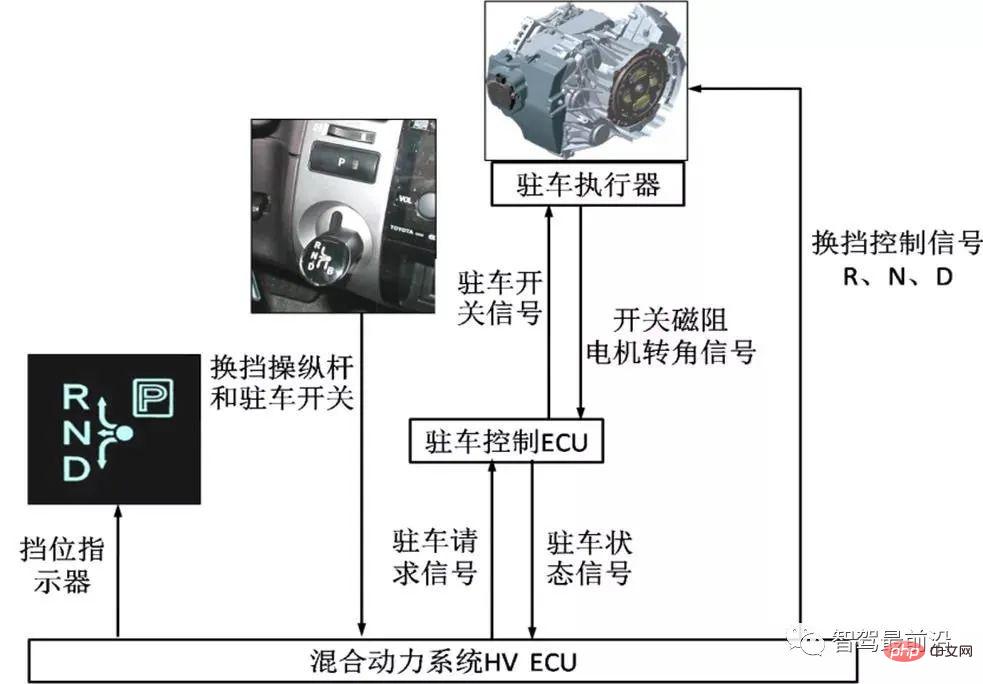
Rajah 18 Gambar rajah struktur sistem anjakan demi wayar model hibrid Toyota
Interaksi manusia-komputer dicapai melalui tuil syif dan suis tempat letak kereta.
Semasa pemanduan biasa kenderaan, tiga gear terlibat: R, N, dan D. Tindakan pemandu pada tuil gear ditukar kepada isyarat elektrik pelaksanaan dan dihantar kepada hibrid sistem HV ECU Selepas pengiraan oleh ECU HV, isyarat gear yang sepadan dikeluarkan kepada transmisi untuk melengkapkan penukaran gear pemanduan kenderaan Pada masa yang sama, penunjuk gear pada panel instrumen menyala sepadan dengan isyarat gear.
Apabila pemandu mengendalikan suis letak kereta, sistem hibrid HV ECU mengira dan menghantar isyarat elektrik pelaksanaan yang dikumpul ke ECU kawalan letak kereta ECU kawalan letak kereta melepasi jenis keengganan Sensor mengumpul isyarat sudut motor penggerak letak kereta pada setiap masa untuk menentukan sama ada kenderaan berada dalam keadaan pegun Jika sudut motor penggerak letak kereta adalah 0, tindakan letak kereta dilakukan dan lampu penunjuk letak kereta pada panel instrumen menyala; kawalan ECU mengesan motor Jika isyarat sudut bukan 0, arahan parkir akan ditolak kepada sistem hibrid HV ECU dan tindakan parkir kenderaan tidak dapat diselesaikan.
Logik pelaksanaan adalah seperti berikut:
Tuil anjakan → ECU Hibrid → Penggerak tempat letak kereta (tiga gear R, N, D) → Penunjuk gear
Suis letak kereta → ECU Kuasa Hibrid→ECU Tempat letak kereta→Penggerak tempat letak kereta (Gear P)→Penunjuk P Parking
Dalam sistem ini, operasi penukaran gear adalah keadaan serta-merta, dan Keupayaan pemandu untuk menggerakkan gear bertukar dengan mudah dan selesa.
Selepas pemandu melepaskan tuil gear, tuil gear serta-merta kembali ke kedudukan asal.
Oleh itu, apabila pemandu mengendalikan tuil gear untuk beralih ke gear sasaran tertentu, tidak perlu mengambil kira status gear semasa Selepas penukaran gear selesai semasa operasi kenderaan, gear Penunjuk menunjukkan dengan tepat gear semasa, membuat pemandu sedar bahawa operasi syif telah selesai. Memandangkan sistem kawalan elektronik digunakan untuk mengawal operasi peralihan penghantaran, setiap komponen berfungsi bersama untuk mencapai peralihan, yang boleh mencegah kesilapan manusia secara berkesan dan meningkatkan keselamatan. Jika ECU syif mengesan operasi yang salah, ia akan mengawal kedudukan gear dalam julat selamat dan mengeluarkan amaran kepada pemandu.
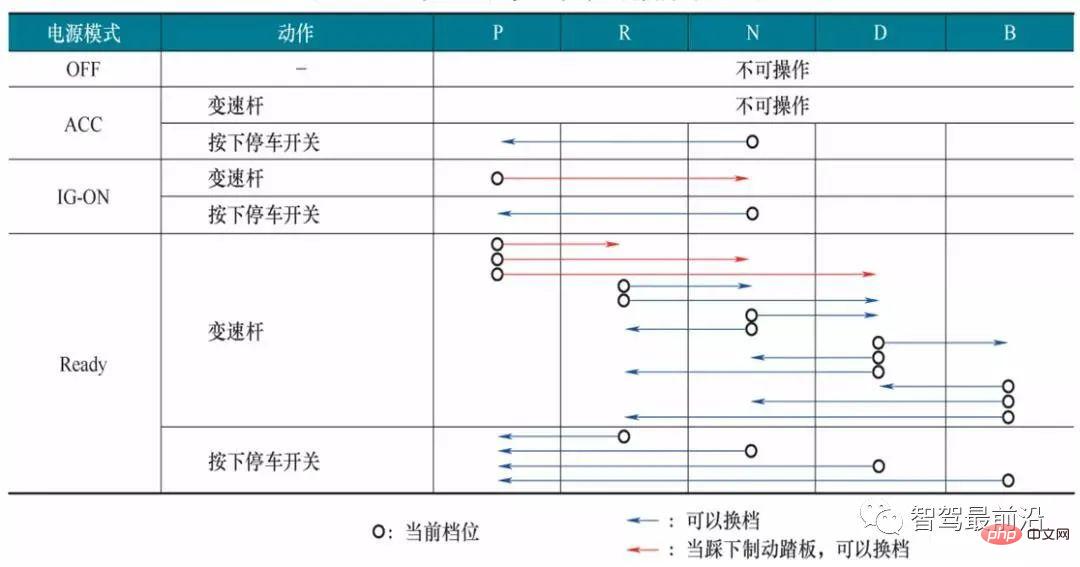
Sebagai contoh, hanya apabila pemandu menekan pedal brek, gear lain boleh dialihkan dari kedudukan P apabila kereta bergerak ke hadapan, jika pemandu memusingkan tuil gear Apabila kereta berada dalam kedudukan R, shift ECU juga akan mengawal transmisi untuk diletakkan dalam neutral apabila kereta sedang mengundur, jika pemandu meletakkan tuas syif ke kedudukan D, shift ECU juga akan mengawal transmisi yang akan diletakkan; dalam neutral. Hanya apabila pedal brek sepenuhnya Ia boleh ditukar dengan lancar dari kedudukan R ke kedudukan D apabila ia tertekan apabila ECU syif mengesan bahawa tuas syif tidak berada dalam kedudukan P, ia tidak akan mengawal kenderaan untuk memutuskan bekalan kuasa. Hubungan operasi antara setiap gear ditunjukkan dalam Jadual 1.
Jadual 1 Jadual hubungan operasi anjakan demi wayar model hibrid Toyota
Audi Q7 shift-by-wire system
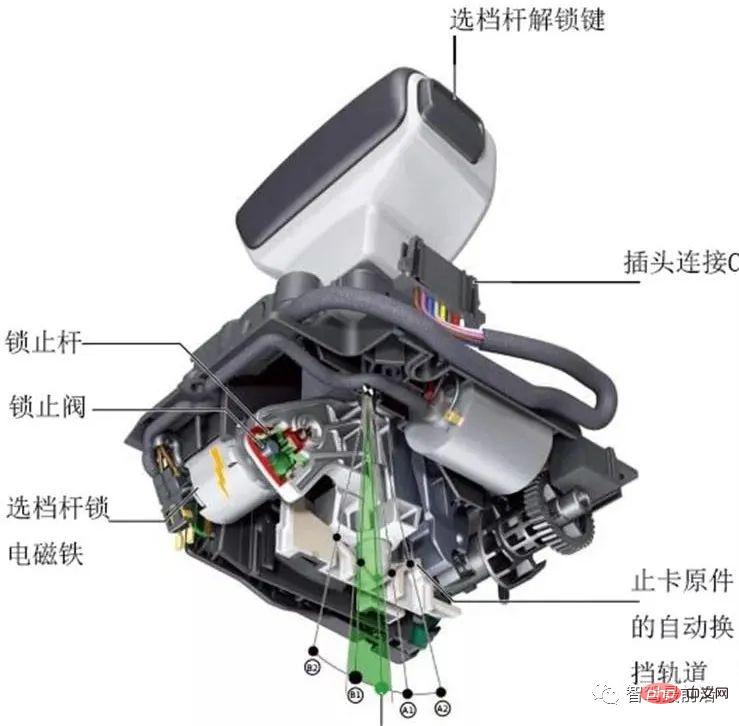
Pada masa ini, Audi Q7 shift-by- sistem wayar Tuas gear terdiri daripada penutup, tuil gear, kunci buka kunci, kunci kedudukan P, penutup habuk, penutup mekanisme operasi anjakan, paparan julat anjakan, mekanisme pengendalian anjakan dan berbilang set penyambung. Seperti yang ditunjukkan dalam Rajah 19 dan 20.

Rajah 19 Sistem anjakan demi wayar Audi Q7

Rajah 20 rajah struktur tuil gear sistem anjakan demi wayar Audi Q7
Sistem shift-by-wire Audi Q7 berbeza daripada sistem shift-by-wire model hibrid Toyota Bahagian bawah tuil gear mengandungi injap solenoid pengunci kedudukan gear dan motor pengunci gear Tiptronic untuk menyokong kompleks dan selamat. pergeseran. Logik dan interaksi somatosensori pengguna. Seperti yang ditunjukkan dalam Rajah 21.
Tuas gear boleh bergerak ke hadapan dan ke belakang masing-masing ke dua kedudukan Apabila memasuki kedudukan D, tuil gear dikunci oleh injap solenoid pengunci kedudukan gear di bahagian bawah melalui tuil pengunci. . Pada masa ini, tuil gear hanya akan dapat bergerak ke belakang untuk bertukar antara kedudukan D/S, tetapi tidak akan dapat bergerak ke hadapan untuk memasuki kedudukan N/R. Untuk mengenal pasti kedudukan tuil gear dengan berkesan dan tepat, sistem anjakan demi wayar dilengkapi dengan beberapa set penderia kedudukan, yang digunakan untuk mengesan kedudukan gear automatik dan kedudukan gear Tiptronic, serta kunci sisi. kedudukan tuil gear, supaya berdasarkan kedudukan gear atau peralihan Logik peralihan gear membuat tindakan peralihan gear tertentu.
Rajah 21 Gambarajah mekanisme penguncian
Ringkasan Pembelajaran
1. Shift By Wire (SBW) ialah struktur transmisi mekanikal yang membatalkan sepenuhnya sistem anjakan tradisional Ia boleh merealisasikan peralihan kenderaan hanya melalui kawalan elektronik untuk kawalan kelajuan, juga dikenali sebagai peralihan elektronik.
2. Sistem syif demi wayar terutamanya terdiri daripada mekanisme operasi syif, ECU syif, modul pelaksanaan syif, ECU kawalan letak kereta dan penunjuk gear.
3 Memandangkan sistem kawalan elektronik digunakan untuk mengawal operasi peralihan transmisi, setiap komponen berfungsi bersama untuk mencapai peralihan, yang boleh menghalang kesilapan manusia dengan berkesan.
Jika ECU mengesan operasi yang salah, ia akan mengawal kedudukan gear dalam julat selamat dan mengeluarkan amaran kepada pemandu.
06 Pengetahuan tentang sistem suspensi kawalan wayar
Pengenalan sistem suspensi kawalan wayar
Suspension By Wire, juga dikenali sebagai sistem penggantungan aktif, adalah bahagian penting kenderaan bersambung pintar Ia boleh menampan getaran dan mengekalkan pemanduan yang lancar, dan secara langsung mempengaruhi prestasi kenderaan dan pengalaman pemanduan.
Pada tahun 1980, BOSE berjaya membangunkan sistem suspensi aktif elektromagnet. Pada tahun 1984, suspensi udara dikawal secara elektronik mula muncul, dan Lincoln menjadi kereta pertama yang menggunakan sistem suspensi udara kawalan wayar boleh laras. Pada masa ini, sistem penggantungan "permaidani ajaib" yang dipasang pada kereta BMW, sistem penggantungan elektromagnet aktif MRC yang dipasang pada kereta Cadillac, dan sistem penggantungan udara adaptif adalah semua bentuk sistem penggantungan kawalan wayar yang berbeza. Sistem suspensi kawalan wayar MAGIC BODY CONTROL yang diguna pakai oleh S-Class generasi baharu Mercedes-Benz boleh melaraskan parameter kenderaan secara automatik seperti pekali redaman penyerap hentak dan ketinggian badan mengikut keadaan jalan raya di hadapan Parameter utama seperti kekakuan suspensi dan redaman mengikut beban kereta dan keadaan pemanduan berubah mengikut kelajuan. Seperti yang ditunjukkan dalam Rajah 22.

Rajah 22 MAGIC BODY CONTROL sistem gantungan kawalan wayar
Sistem gantungan kawalan wayar terutamanya terdiri daripada suis pemilihan mod, penderia, ECU dan penggerak, seperti ditunjukkan dalam Rajah 23.
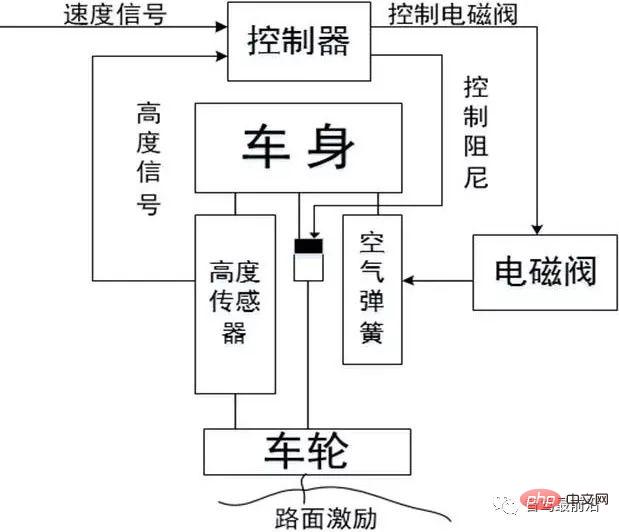
Rajah 23 Gambarajah skematik prinsip kerja sistem suspensi dikawal wayar biasa
Penderia bertanggungjawab mengumpul keadaan pemanduan kereta (terutamanya keadaan beralun), kelajuan kenderaan dan keadaan kerja seperti permulaan, pecutan, stereng, brek, dll. ke dalam isyarat elektrik, yang kemudian dihantar ke ECU penggantungan terkawal wayar selepas pemprosesan mudah. Antaranya, ia terutamanya melibatkan sensor utama seperti sensor pecutan kenderaan, sensor ketinggian, sensor kelajuan dan sensor sudut. Spring udara bertindak balas dengan tepat, cepat dan tepat pada masanya mengikut isyarat kawalan ECU, termasuk perubahan dalam parameter utama seperti jisim gas dalam silinder, tekanan gas dan tekanan set injap solenoid, untuk mencapai perubahan dalam kekakuan spring badan, penyerap hentakan redaman dan pelarasan ketinggian. Penggerak sistem suspensi dikawal wayar terutamanya terdiri daripada penggerak, peredam, injap solenoid, motor stepper, motor pam udara, dll.
Seperti yang ditunjukkan dalam Rajah 24, ECU sistem suspensi dikawal wayar boleh merealisasikan fungsi utama seperti redaman penyerap hentak, kekakuan spring udara dan kawalan panjang spring udara (tinggi badan).
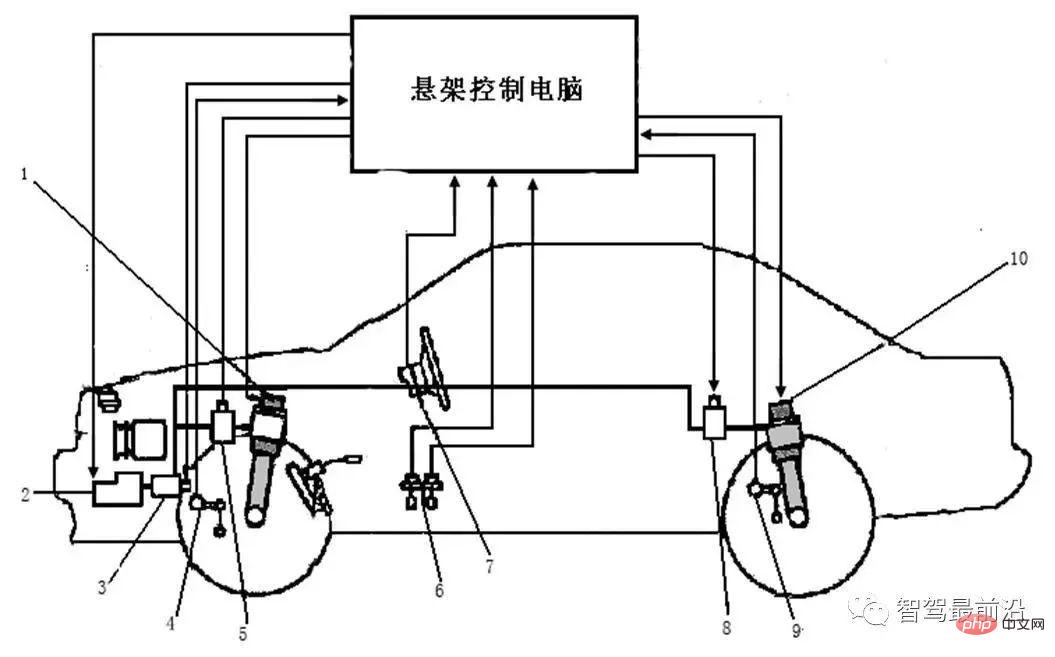
Rajah 24 rajah kawalan ECU sistem gantungan dikawal wayar
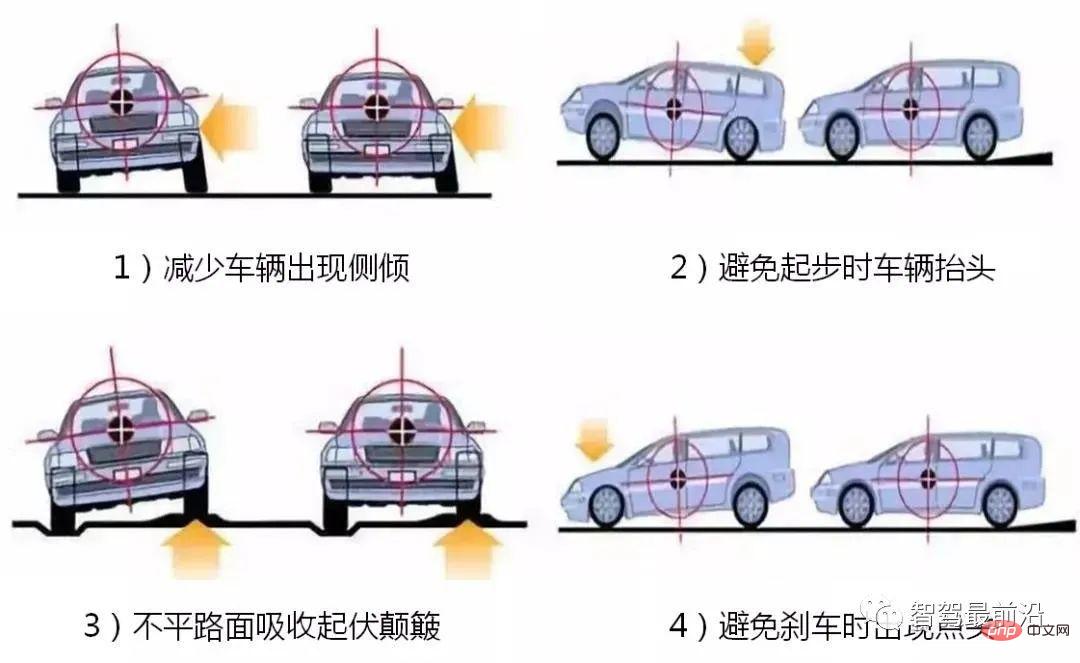
Kawalan redaman penyerap hentak dan kekakuan spring terutamanya memastikan kestabilan dan keselesaan badan di bawah pelbagai keadaan kerja tertentu termasuk kawalan anti-gulung, kawalan anti-mengangguk, kawalan anti-squat, dan Kawalan kelajuan tinggi, kawalan permukaan jalan yang tidak rata, dsb., seperti yang ditunjukkan dalam Rajah 25.
Rajah 25 Diagram skematik prinsip kerja sistem suspensi dikawal wayar biasa
Kawalan ketinggian badan kenderaan adalah terutamanya untuk mengawal ketinggian badan kenderaan dalam arah mendatar Termasuk kawalan keadaan statik, kawalan keadaan pemanduan dan kawalan aras automatik, dsb. Kawalan keadaan statik bermaksud apabila kenderaan dalam keadaan pegun, disebabkan perubahan muatan kenderaan disebabkan faktor penumpang dan kargo, sistem suspensi kawalan wayar secara automatik akan menukar ketinggian badan kenderaan untuk mengurangkan beban pada sistem suspensi dan menambah baik penampilan kereta.
Kawalan keadaan pemanduan mengambil kira beban statik dan dinamik kenderaan Apabila kereta dipandu pada kelajuan tinggi, sistem suspensi kawalan wayar secara aktif menurunkan ketinggian badan kenderaan untuk bertambah baik kestabilan pemanduan dan ciri aerodinamik; apabila kereta memandu di jalan yang tidak rata, ia secara aktif menaikkan badan untuk mengelakkan perlanggaran antara badan dan tanah atau penggantungan, dan pada masa yang sama mengubah kekakuan sistem penggantungan untuk menyesuaikan diri dengan keperluan keselesaan pemanduan.
Kawalan mendatar automatik, di bawah keadaan pemanduan di jalan rata dan terbuka, ketinggian badan kenderaan tidak dipengaruhi oleh beban dinamik dan beban statik, dan mengekalkan postur pada dasarnya tetap untuk memastikan pemanduan keselesaan dan Arah pancaran lampu utama kekal tidak berubah, meningkatkan keselamatan pemanduan. Penyerap hentak penjana kuasa PGSA (Power-Generating Shock Absorber) yang dilancarkan oleh syarikat BOSE Amerika sepenuhnya terdiri daripada sistem elektromagnet motor linear LMES (Linear Motion Electromagnetic System) Setiap roda dilengkapi dengan set berasingan sistem dan komponen ini Sistem penggantungan bebas badan. Seperti yang ditunjukkan dalam Rajah 26.
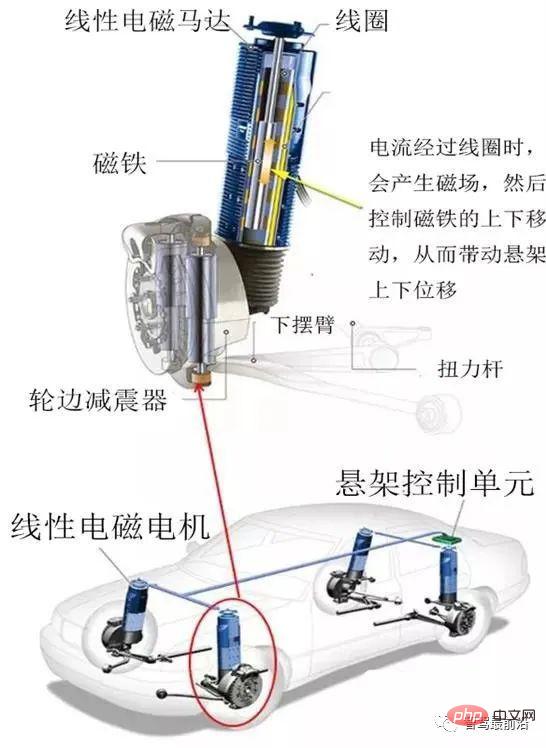
Rajah 26 Penyerap hentak penjanaan kuasa PGSA syarikat BOSE Amerika
Prinsip kerjanya ialah: isyarat kawalan pelarasan setiap roda dikuatkan oleh penguat kuasa BOSE untuk menukar arus operasi motor pemacu, dengan itu memacu motor linear elektromagnet untuk menukar keadaan teleskopik penggantungan. Sistem ini bukan sahaja dapat membekalkan arus kepada motor, tetapi juga menjana arus dari motor untuk mengecas bateri kenderaan elektrik semasa kenderaan memandu, membentuk mekanisme pemulihan tenaga, yang sangat bermanfaat untuk penggunaan kenderaan tenaga baru yang didorong oleh tulen. Kuasa elektrik Meningkatkan kuasa bateri dan memanjangkan jarak pemanduan kenderaan elektrik.
Ciri sistem suspensi kawalan wayar
Sistem suspensi terkawal wayar boleh dikawal mengikut berbeza keadaan kerja kereta. Penggerak menghasilkan kekakuan spring yang berbeza dan redaman penyerap hentakan, yang bukan sahaja dapat memenuhi keperluan keselesaan perjalanan dan kestabilan pengendalian, tetapi juga memastikan keperluan keselesaan pemandu. Kelebihan utamanya adalah seperti berikut:
1) Kekakuan boleh laras, yang boleh meningkatkan pusingan selekoh kereta, brek ke hadapan dan pecutan kepala ke atas; >2) Apabila beban kereta berubah, ia boleh brek untuk mengekalkan ketinggian kereta; untuk mempertingkatkan kebolehlaluan kereta; proses brek dan memendekkan jarak brek; .
Walaupun sistem suspensi kawalan wayar mempunyai banyak kelebihan, struktur kompleksnya juga menentukan bahawa sistem suspensi kawalan wayar mempunyai kelemahan yang tidak dapat dielakkan:
1) Strukturnya kompleks, dan kebarangkalian dan kekerapan kegagalan adalah lebih tinggi daripada sistem penggantungan tradisional. Memandangkan penggantungan kawalan wayar memerlukan setiap penggantungan roda mempunyai unit kawalan, algoritma pengoptimuman selepas mendapatkan data permukaan jalan adalah sangat sukar dan boleh menyebabkan pelarasan berlebihan atau kegagalan dengan mudah; 2) Adopt Air berfungsi sebagai "kuasa pendorong" untuk melaraskan ketinggian casis, dan keperluan pengedap penyerap hentak adalah sangat tinggi Jika penyerap hentak udara bocor, keseluruhan sistem akan berada dalam keadaan "lumpuh", dan kerap pelarasan pada ketinggian casis boleh menyebabkan Sistem pam udara separa terlalu panas, yang memendekkan hayat perkhidmatan pam udara.
Ringkasan Pembelajaran
1. Suspension By Wire, juga dikenali sebagai suspensi aktif, adalah bahagian penting kenderaan bersambung pintar. Ia boleh menampan getaran dan mengekalkan pemanduan yang lancar, secara langsung mempengaruhi prestasi pengendalian dan pengalaman pemanduan.
2. Sistem penggantungan dikawal wayar terutamanya terdiri daripada suis pemilihan mod, penderia, ECU dan penggerak.
3. Kawalan sistem suspensi kawalan wayar ECU dapat merealisasikan fungsi utama seperti redaman penyerap hentak, kekakuan spring dan kawalan ketinggian kenderaan.
Atas ialah kandungan terperinci Analisis mendalam teknologi casis kawalan wayar untuk kereta bersambung pintar. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI