
Rumah >Peranti teknologi >AI >Lebih daripada dua kali lebih pantas daripada cheetah! Alumnus Universiti Zhejiang membangunkan robot lembut yang lebih pantas daripada kereta lumba F1 dan diterbitkan dalam sub-majalah Nature
Lebih daripada dua kali lebih pantas daripada cheetah! Alumnus Universiti Zhejiang membangunkan robot lembut yang lebih pantas daripada kereta lumba F1 dan diterbitkan dalam sub-majalah Nature

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBke hadapan
- 2023-04-17 12:52:16834semak imbas
"Kenapa awak kejar saya?"
"Sebab saya perlukan sirap dengan segera."

Sekarang, berhati-hati dengan sirap kecemasan anda, kerana robot lembut yang akan kami perkenalkan hari ini boleh berjalan dua kali lebih pantas daripada cheetah! Ia lebih laju daripada kereta F1, dan boleh berlari pada kelajuan maksimum 70 panjang badan/s Sebagai perbandingan, seekor cheetah berlari pada kira-kira 25 panjang badan/s, dan kereta F1 berjalan pada 50 panjang badan/s (badan. panjang sesaat). Perwakilan panjang kelajuan relatif boleh mengukur kelajuan organisma yang berbeza pada pelbagai saiz badan).
Laju ini kelihatan seperti kerang yang naif, tetapi jangan berkelip, jika tidak, ia akan hilang.
Ini adalah robot mikro lembut yang digerakkan oleh elektromagnetisme yang dibangunkan oleh pasukan Makmal Bahan Lembut Universiti Johannes Kepler Ia hanya bersaiz setem pos. tetapi juga Mampu berenang, mendaki anak tangga, melintasi halangan dan mengangkut kargo.
Penyelidikan itu diterbitkan dalam jurnal Nature Communications di bawah tajuk "Ultrafast small-scale soft electromagnetic robots ”.
Penulis artikel yang sepadan dan pertama ialah Dr. Guoyong Mao dari China Beliau lulus dari Universiti Zhejiang dengan ijazah sarjana muda dan doktor falsafah. Beliau kini bekerja di Johannes Kepler membuat penyelidikan di Universiti.
Kelajuan tujuh puluh batu, badan bebas
Banyak haiwan di alam semula jadi boleh bergerak cepat — seperti cheetah atau gazelle, di mana ciri ini digunakan untuk membantu haiwan menangkap mangsa atau bersembunyi daripada pemangsa. Selama bertahun-tahun, ia telah menjadi matlamat saintis untuk mencipta robot lembut dan fleksibel dengan keupayaan kelajuan yang sama Walau bagaimanapun, kelemahan semula jadi bahan fleksibel, seperti tindak balas yang perlahan dan kekuatan rendah, menjadikan kebanyakan robot lembut bergerak perlahan.
Robot berasaskan elastomer elektromagnet lembut (SEMR) biasanya bertindak balas dengan cepat dan mudah untuk mengecilkan penggerak elastomer elektromagnet lembut boleh dibuat dengan mencetak gegelung logam cecair pada substrat elastik semasa kepada logam cecair, pergerakan penggerak boleh dikawal.
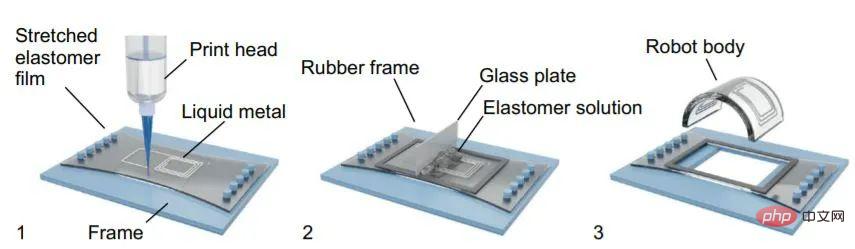
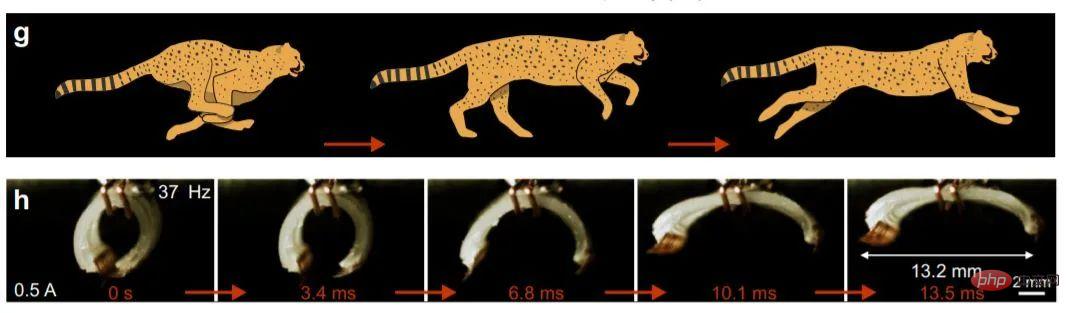
Tetapi gerakan membengkok seperti ini masih jauh dari mencukupi. Jika anda ingin memberikan robot mekanisme pergerakan yang tinggi, reka bentuk lanjut diperlukan. Para penyelidik mencipta penggerak dwilapisan dengan melekatkan lapisan pra-regang (atas) pada lapisan yang tidak cacat (bawah) supaya apabila dwilapisan dilepaskan, ia melengkung ke atas, mengambil kesempatan daripada terikan yang tidak padan yang dicipta oleh dwilapisan dan dilepaskan untuk meniru pergerakan cheetah berlari.
Selain badan, reka bentuk kaki robot juga sangat penting -kaki berbentuk boleh Dijalankan pada pelbagai permukaan rata termasuk kertas, kayu, logam, plastik dan kaca. Walau bagaimanapun, lebih besar geseran antara bahan kaki dan permukaan rata, lebih pantas robot akan berjalan, sama seperti cara kuku cheetah boleh menggenggam tanah dengan kuat.
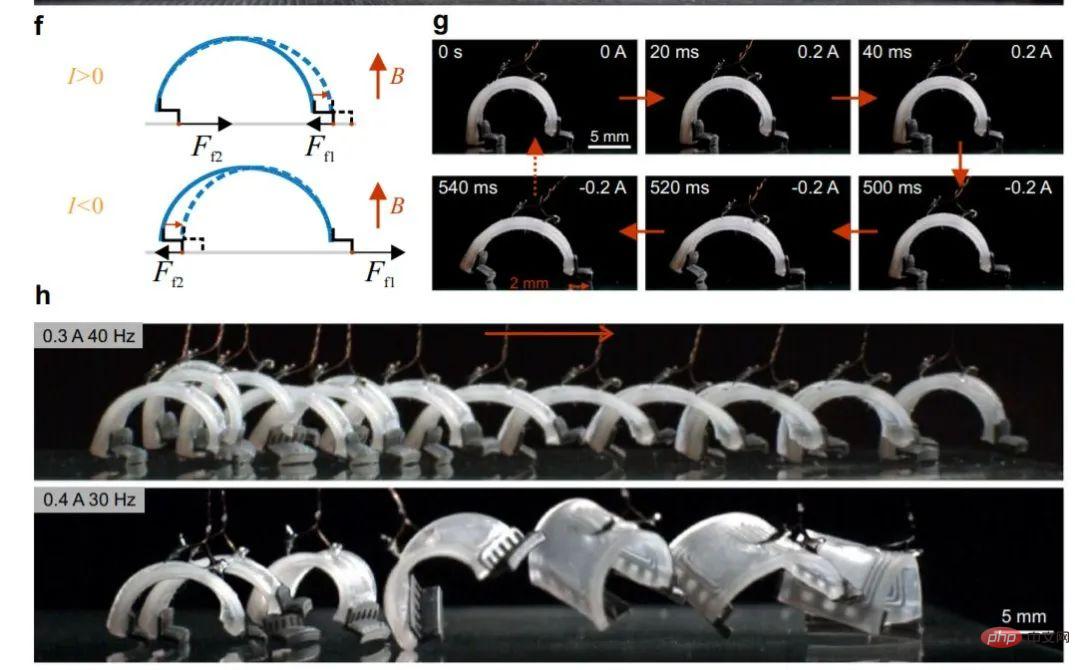
Apabila robot dibuka, kaki hadapan bergerak ke hadapan, manakala kaki belakang dibetulkan kerana saling mengunci, kemudian robot itu mengecut, bahagian hadapan kaki dibetulkan, dan kaki belakang bergerak ke hadapan Tarik ke hadapan. Ia mencapai kelajuan operasi ultra tinggi 70 panjang badan/s pada substrat beralun 3D (permukaan rata optimum) dan purata 35 panjang badan/s pada mana-mana permukaan lain.
Setakat ini, robot kecil telah digerakkan oleh sistem bekalan kuasa luaran yang ditambat Bagi merealisasikan lagi "kebebasan" robot itu, para penyelidik melepaskan tali dan meletakkan bekalan kuasa "beg kecil. " di belakang robot - —Papan litar bercetak (PCB) berkuasa bateri tersuai. Robot yang membawa beg sekolah tidak bergerak sepantas dahulu, tetapi ia masih boleh mencapai 2.1 panjang badan/s dan berenang pada kelajuan 1.8 panjang badan/s.
Serbaguna dan kebebasan pergerakan: bukan sekadar kelajuan
Lebih daripada sekadar pergerakan berkelajuan tinggi , banyak haiwan mempunyai strategi kelangsungan hidup yang lebih luas, seperti daya tahan terhadap hentaman atau jatuh, keupayaan untuk mengelakkan halangan, keupayaan untuk menyeberangi sempadan daratan/akuatik sesuka hati, dan keupayaan untuk mengangkut mangsa.
Robot itu juga mempunyai keupayaan ini, para penyelidik menjalankan ujian ketahanan ke atasnya, meratakannya dengan objek berat semasa berjalan, dan menggunakan mesin ujian tegangan untuk memampatkan badan utama robot. Ia didapati menahan tegasan mampatan sehingga 139 atm (2000 N pada badan utama).
Ketahanan sahaja tidak mencukupi, dan mengatasi halangan tetap mencabar bagi kebanyakan robot kecil . Robot boleh melompat melepasi halangan dengan menggunakan isyarat elektrik berdenyut Ia mula-mula mengecut dan kemudian mencondongkan badannya (menyimpan tenaga dalam proses), kemudian mengembang seperti spring termampat (melepaskan tenaga) dan melompat melepasi halangan.
Selain persekitaran daratan, robot kecil itu juga telah belajar berenang, berkat cahayanya berat dan ketumpatan purata yang agak rendah, ia boleh terapung di atas air tanpa pengubahsuaian lanjut apabila didorong dengan arus gelombang persegi (0.5 A, 20 Hz), robot berenang pada kelajuan maksimum 43 mm/s atau 4.8 panjang badan, jika penambahbaikan selanjutnya dilakukan pada masa hadapan Kepantasan ikan akan dicapai.
Portal kertas:
https://www.nature.com/ artikel /s41467-022-32123-4
Atas ialah kandungan terperinci Lebih daripada dua kali lebih pantas daripada cheetah! Alumnus Universiti Zhejiang membangunkan robot lembut yang lebih pantas daripada kereta lumba F1 dan diterbitkan dalam sub-majalah Nature. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI