
Rumah >Peranti teknologi >AI >Drone yang boleh menahan angin kencang? Caltech menggunakan data penerbangan selama 12 minit untuk mengajar dron terbang mengikut angin
Drone yang boleh menahan angin kencang? Caltech menggunakan data penerbangan selama 12 minit untuk mengajar dron terbang mengikut angin

- WBOYke hadapan
- 2023-04-09 23:51:081302semak imbas
Apabila angin cukup kuat untuk meniup payung, drone itu stabil, seperti ini:
Angin terbang adalah sebahagian daripada terbang di udara Dari tahap yang besar, kelajuan angin mungkin membawa cabaran kepada juruterbang apabila mereka mendaratkan pesawat dari tahap yang kecil, angin kencang juga akan menjejaskan penerbangan dron.
Pada masa ini, dron sama ada diterbangkan dalam keadaan terkawal, tanpa angin, atau dikendalikan oleh manusia menggunakan alat kawalan jauh. Dron dikawal oleh penyelidik untuk terbang dalam formasi di langit terbuka, tetapi penerbangan ini biasanya dijalankan dalam keadaan dan persekitaran yang ideal.
Walau bagaimanapun, untuk membolehkan dron melakukan tugasan yang perlu tetapi rutin secara autonomi, seperti menghantar pakej, dron mesti dapat menyesuaikan diri dengan keadaan angin dalam masa nyata.
Untuk memberikan dron kebolehgerakan yang lebih baik apabila terbang mengikut angin, sepasukan jurutera dari Caltech membangunkan Neural-Fly, rangkaian saraf dalam yang Alat kecerdasan buatan yang membolehkan dron kekal tangkas dalam keadaan berangin dengan hanya mengemas kini beberapa parameter utama untuk membantu dron bertindak balas terhadap keadaan angin baharu dan tidak diketahui dalam masa nyata.
Pada permulaan artikel, kita telah melihat keupayaan rintangan angin dron Berikut menunjukkan dron empat rotor Dengan bantuan alat yang dibangunkan dalam penyelidikan ini. ia boleh mencapai kelajuan angin sehingga Selesaikan operasi ulang-alik angka-8 pada 27 mph:
Tonton dron terbang mengikut angin dari tempat lain sudut:
Untuk membolehkan dron boleh ulang-alik di bawah pelbagai kelajuan angin, data adalah penting diperoleh hanya dalam masa 12 Selepas beberapa minit data penerbangan, drone quadcopter autonomi yang dilengkapi dengan Neural-Fly mempelajari cara bertindak balas terhadap angin kencang. "Jumlah data yang digunakan adalah sangat kecil, " kata Michael O'Connell, seorang pelajar siswazah di Jabatan Aeronautik dan Astronautik Caltech dan salah seorang pengarang kertas itu.
Penyelidikan itu diterbitkan hari Rabu dalam jurnal Science Robotics.
- Alamat kertas: https://www.science.org/doi/10.1126/scirobotics.abm6597
- alamat arXiv: https://arxiv.org/pdf/2205.06908.pdf
Semasa latihan eksperimen Neural-Fly, dron terbang dalam angin Terbang di dalam gua, terdapat enam kelajuan angin yang berbeza, yang terpantas ialah 13.4 mph.
Daripada data ini, pasukan mencipta rangkaian saraf dalam dan kemudian membenarkan pesawat mereka bergerak dengan mahir dalam terowong angin yang sama, mis dalam corak angka-8 atau pelayaran melalui dua pintu bujur. Drone itu bergerak lebih pantas dalam ujian daripada yang dialami dalam latihan: kira-kira 27 batu sejam. Ini adalah kelajuan angin maksimum yang boleh dijana oleh terowong angin, kata Guanya Shi, seorang pengarang di atas kertas dan pelajar siswazah di Caltech. Selain memerlukan hanya sejumlah kecil data, perisian ini hanya berjalan pada Raspberry Pi, peranti pengkomputeran yang murah.
Soon-Jo Chung, profesor aeroangkasa, kawalan dan sistem dinamik di Caltech dan pengarang yang sepadan, berkata bahawa kadar ralat yang mereka lihat dibandingkan dengan teknologi SOTA sedia ada, dilengkapi dengan sistem baru prestasi penerbangan dron adalah 2.5 hingga 4 kali lebih baik.
Gambar di bawah dari kiri ke kanan ialah Shi Guanya, Soon-Jo Chung dan Michael O'Connell. Adalah wajar untuk mengucapkan tahniah kerana Shi Guanya akan menyertai Institut Robotik Sekolah Pengkomputeran di Carnegie Mellon University sebagai penolong profesor pada September 2023.
Penyelidik berkata teknologi ini akan digunakan untuk penghantaran dron atau kereta terbang pada masa hadapan.
Gambaran Keseluruhan Teknologi Neural-Fly
Kenderaan Udara Tanpa Pemandu (UAV) Berprestasi dalam Angin Berkelajuan Tinggi Dinamik jika Pengkomersialan Berkekalan Dicapai Manuver penerbangan yang selamat dan tepat adalah kritikal. Walau bagaimanapun, adalah mencabar untuk mereka bentuk pengawal robot yang cekap menggunakan kaedah reka bentuk kawalan tradisional memandangkan hubungan antara keadaan angin yang berbeza dan kesannya terhadap kebolehgerakan UAV belum dikaji secara mendalam.
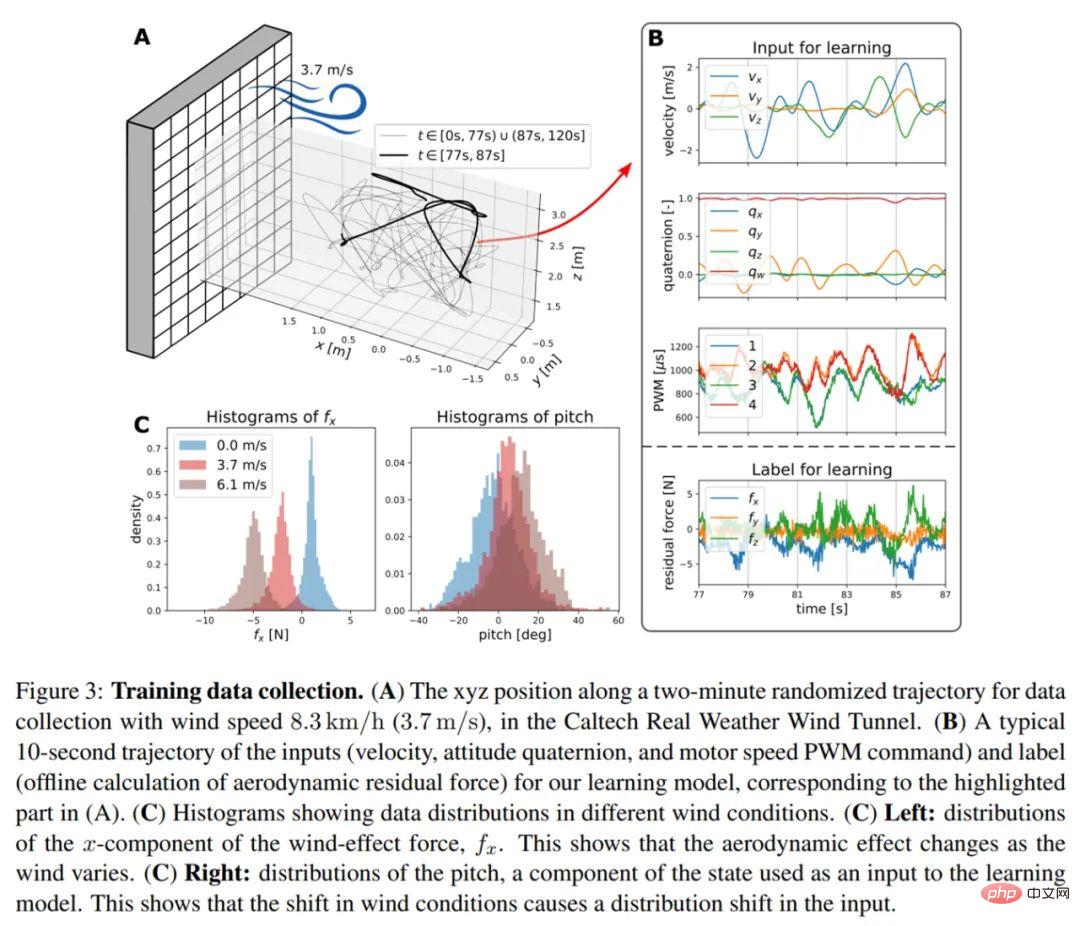
"Neural-Fly" yang dicadangkan oleh penyelidik di California Institute of Technology ialah kaedah dipacu data Sebagai pengawal penjejakan trajektori berdasarkan pembelajaran mendalam, ia boleh belajar menyesuaikan diri dengan cepat dengan keadaan angin yang berubah dengan pantas. Rajah 3(A) di bawah menunjukkan proses pengumpulan data; 3(B) menunjukkan input dan label data latihan di bawah kelajuan angin 13.3km/j (3.7m/s) menunjukkan data input dan label di bawah keadaan angin yang berbeza Taburan data berlabel.
Pembelajaran meta adaptif + luar talian dalam talian
Rajah 2 di bawah ialah gambaran keseluruhan Neural- Kaedah terbang, Ia menunjukkan kemajuannya dalam kawalan penerbangan adaptif dan kawalan robot berasaskan pembelajaran mendalam. Neural-Fly membolehkan pengesanan ralat kedudukan peringkat sentimeter untuk trajektori yang fleksibel dan mencabar di bawah keadaan angin dinamik untuk UAV standard. Secara khususnya, kaedah ini terutamanya terdiri daripada dua bahagian, iaitu fasa pembelajaran luar talian dan fasa kawalan penyesuaian dalam talian untuk pembelajaran dalam talian masa nyata.
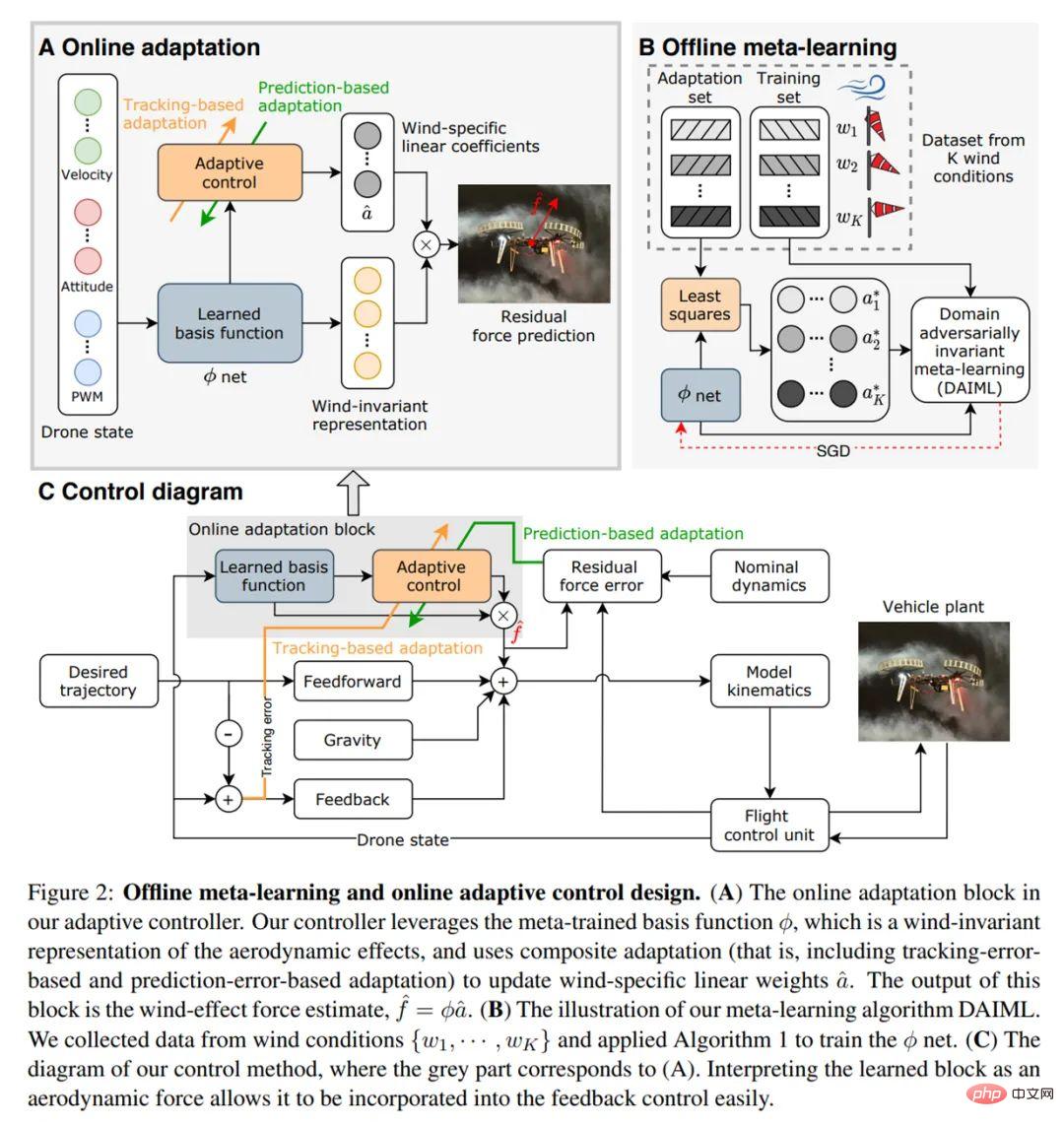
Untuk peringkat pembelajaran luar talian, penyelidik membangunkan Domain Adversarially Invariant Meta-Learning, DAIML), yang mempelajari angin aerodinamik -perwakilan rangkaian neural dalam (DNN) bebas dengan cara yang cekap data. Perwakilan menyesuaikan diri dengan keadaan angin yang berbeza dengan mengemas kini set output pekali linear oleh rangkaian neural dalam hibrid.
DAIML juga cekap data, hanya menggunakan sejumlah 12 minit data penerbangan dalam 6 keadaan angin berbeza untuk melatih rangkaian saraf dalam . DAIML mengandungi beberapa ciri utama yang bukan sahaja meningkatkan kecekapan data tetapi juga boleh dimaklumkan oleh peringkat kawalan penyesuaian dalam talian hiliran.
Perlu diambil perhatian bahawa DAIML menggunakan normalisasi spektrum untuk mengawal sifat Lipschitz rangkaian saraf dalam untuk meningkatkan generalisasi kepada data yang tidak kelihatan dan menyediakan kestabilan dan Kekukuhan gelung tertutup. Selain itu, DAIML menggunakan rangkaian diskriminatif untuk memastikan perwakilan yang dipelajari adalah invarian angin dan maklumat berkaitan angin hanya dimasukkan dalam pekali linear yang disesuaikan dengan peringkat kawalan dalam talian.
Untuk peringkat kawalan penyesuaian dalam talian, para penyelidik membangunkan undang-undang kawalan penyesuaian kompaun yang ditetapkan, yang berdasarkan bagaimana perwakilan yang dipelajari berinteraksi dengan kawalan gelung tertutup Ia diperoleh daripada pemahaman asas interaksi sistem dan mempunyai sokongan teori yang ketat.
Secara khusus, undang-undang penyesuaian menggunakan gabungan istilah ralat penjejakan kedudukan dan istilah ralat ramalan aerodinamik untuk mengemas kini pekali linear yang berkaitan dengan angin. Pendekatan ini secara berkesan menjamin penyesuaian yang stabil dan pantas kepada sebarang keadaan angin dan keteguhan kepada pembelajaran yang tidak sempurna. Walaupun undang-undang kawalan penyesuaian ini boleh digunakan dengan banyak model yang dipelajari, perwakilan tepat yang dipelajari daripada DAIML membantu meningkatkan lagi kelajuan penyesuaian.
Hasil eksperimen
Setakat kesan Neural-Fly, ia adalah 66% lebih baik daripada pengawal penjejakan tak linear secara purata dan lebih baik daripada L_1 sejak Pengawal adaptif dipertingkatkan sebanyak 42%, iaitu 35% lebih tinggi daripada pengawal incremental nonlinear dynamic inversion (INDI). Kesemua keputusan ini dicapai menggunakan perkakasan dron quadcopter standard semasa menjalankan kawalan sikap ditala lalai PX4.
Walaupun dibandingkan dengan kerja berkaitan yang tidak mempunyai gangguan angin luaran dan menggunakan perkakasan yang lebih kompleks (seperti penderia optik onboard yang memerlukan 10 kali frekuensi kawalan dan menggunakan maklum balas kelajuan motor DC), Neural - Prestasi pengesanan The Fly juga kompetitif.
Jadual 1 di bawah menunjukkan statistik penjejakan ralat kaedah berbeza di bawah keadaan angin yang berbeza.
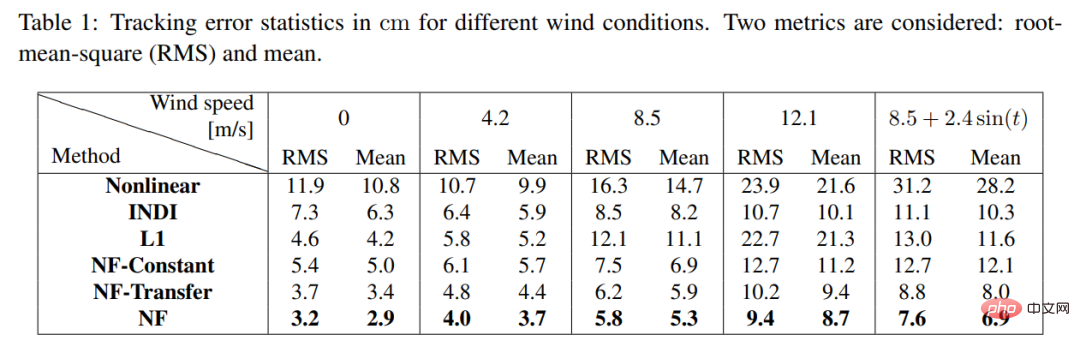
Para penyelidik membandingkan Neural-Fly dengan dua varian, iaitu Neural-Fly-Transfer dan Neural-Fly-Constant . Antaranya, NF-Transfer menggunakan perwakilan yang dipelajari daripada latihan mengenai data daripada dron yang berbeza, manakala NF-Constant hanya menggunakan undang-undang kawalan adaptif dengan asas bukan pembelajaran yang remeh.
Neural-Fly-Transfer menunjukkan keteguhan kepada perubahan konfigurasi UAV dan ketidakpadanan model, dan kaedah NF-Constant, L_1 dan INDI semuanya secara langsung menyesuaikan diri dengan dinamik yang tidak diketahui tanpa Mengandaikan struktur fizikal asas, mereka mempunyai prestasi yang sama.
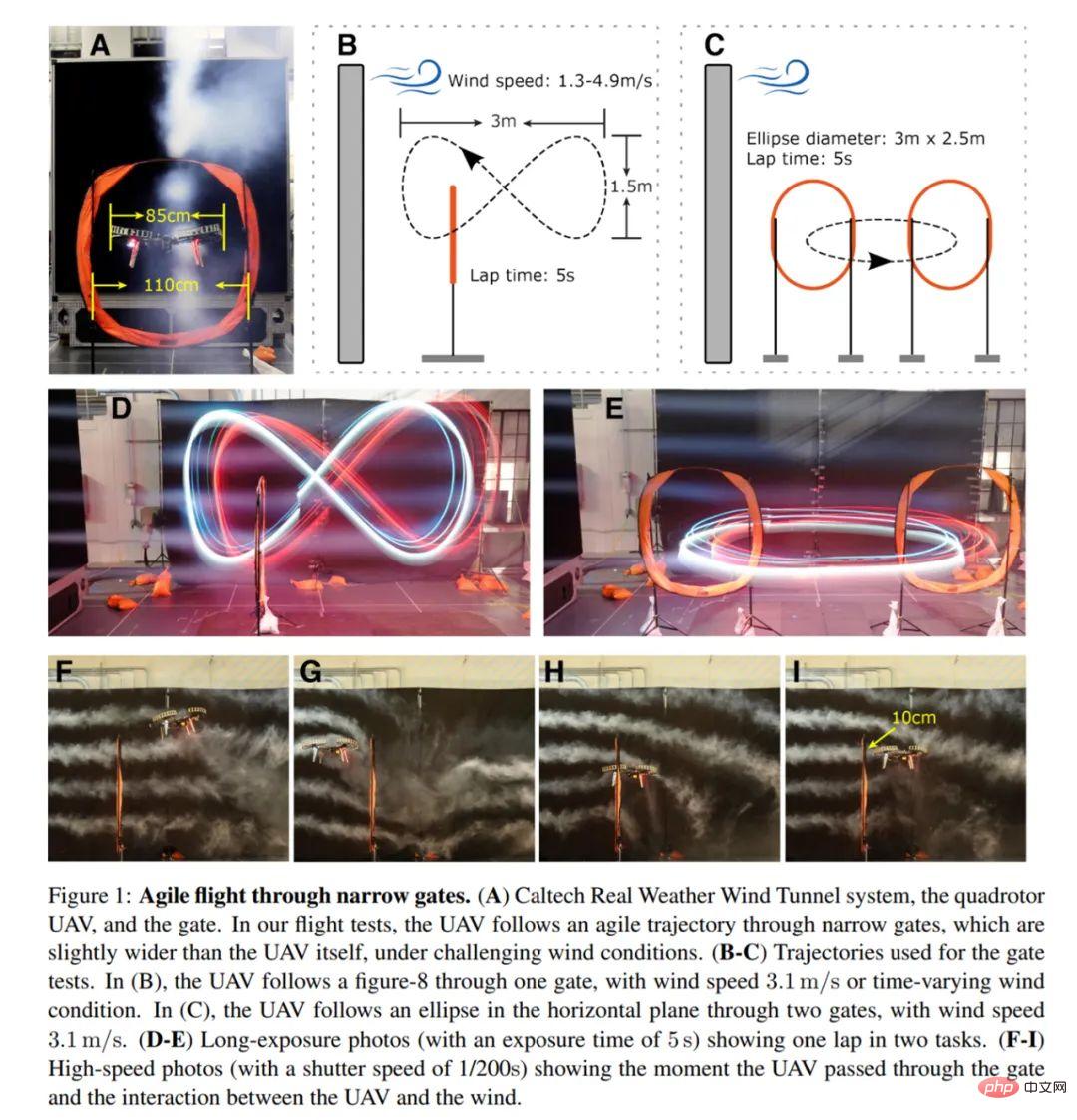
Akhir sekali, para penyelidik membuktikan bahawa Neural-Fly boleh melaksanakan satu siri fungsi, membolehkan dron mengikuti trajektori dan terbang melalui pintu altitud rendah dengan lincah di bawah keadaan angin yang kuat, kerana ditunjukkan dalam Rajah 1 di bawah.
Atas ialah kandungan terperinci Drone yang boleh menahan angin kencang? Caltech menggunakan data penerbangan selama 12 minit untuk mengajar dron terbang mengikut angin. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI