
Rumah >Peranti teknologi >AI >Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci
Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBasal
- 2024-09-02 16:34:12914semak imbas


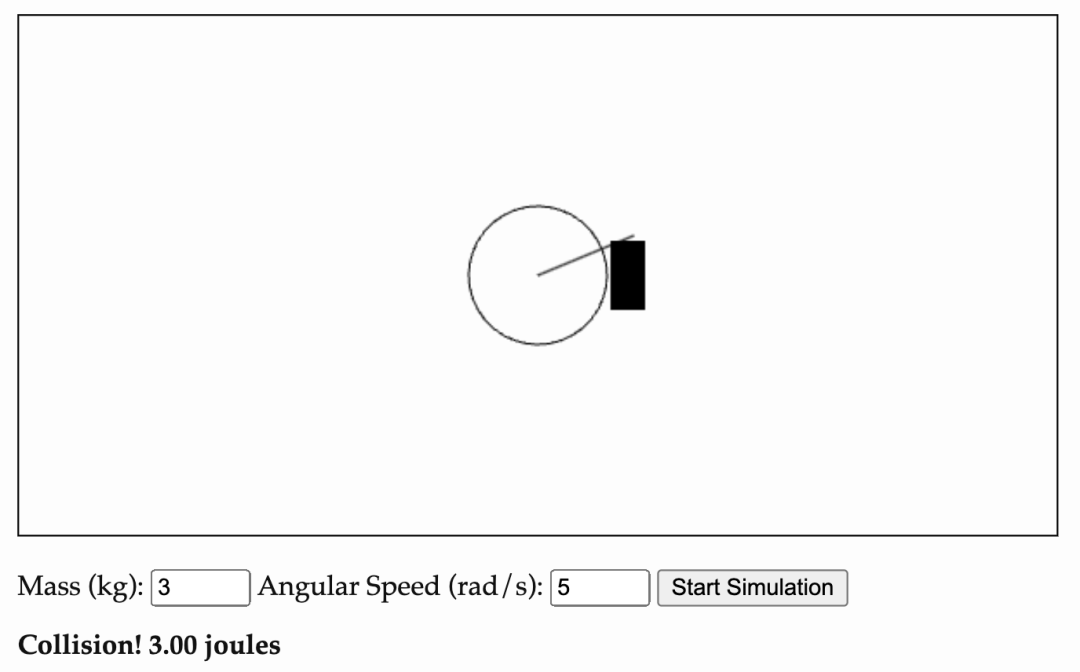
 によると、I は慣性モーメント、ω は角速度です。レバーには質量がないと想定されているため、システムの慣性は固定シリンダーの慣性と同等です:
によると、I は慣性モーメント、ω は角速度です。レバーには質量がないと想定されているため、システムの慣性は固定シリンダーの慣性と同等です:  。値を代入すると、I = 0.24 kg⋅m^2 となります。したがって、このシステムの回転運動エネルギーはさらに 3 ジュールと計算できます。
。値を代入すると、I = 0.24 kg⋅m^2 となります。したがって、このシステムの回転運動エネルギーはさらに 3 ジュールと計算できます。 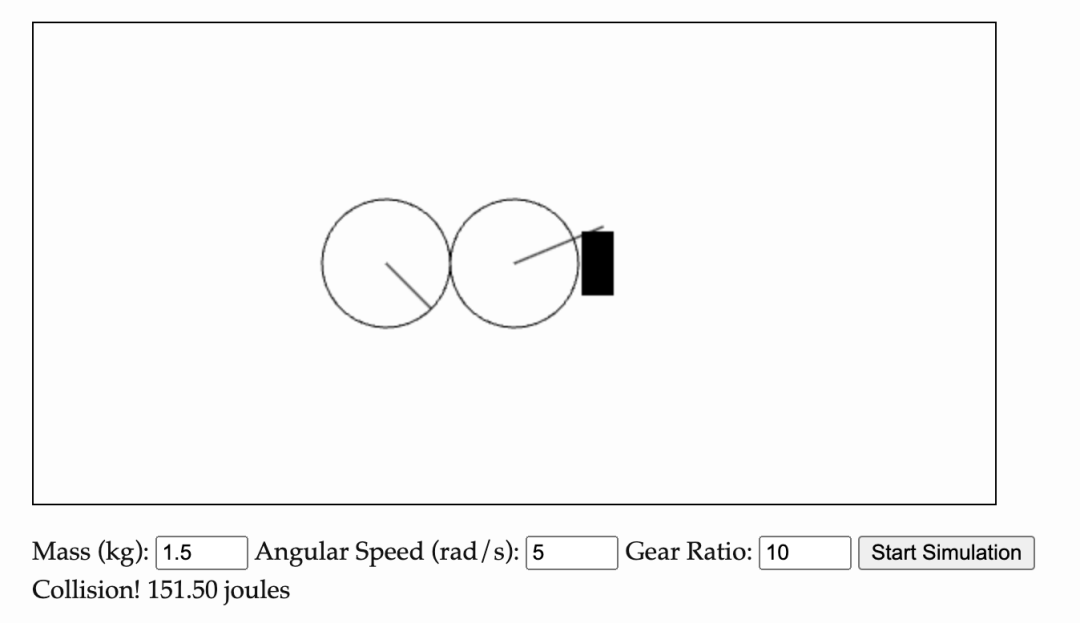

その理由は、ギアボックスが重要な機械的レバレッジを提供するためです。多くのモーターは単独で動作すると十分なトルクを提供できないため、エンジニアは高速モーターにギアを取り付けます。必要なトルクを犠牲にしています。
この種の歯車システムは「剛性」があり、一度回転し始めると歯車がしっかりと噛み合い、逆駆動することが困難になります。引き返してください。そのため、ギアボックスのもう一方の端では、高速モーターによって生成される回転力に抵抗するために、より多くの力を加える必要があります。
上記の考慮事項に基づいて、1X Technologies は過去 10 年間、トランスミッション システムの安全性を最大限に高めるために高トルク、低速モーターの製造に取り組んできました。 NEO ロボットは、ギア比が小さく軽量なモーターと駆動システムを採用しているため、家庭環境に安全に組み込むことができる初の真の家庭用ロボットとなっています。
1.一般的なロボットの進歩がボトルネックになっている。ロボットのハードウェアは高価ですが、かさばるハードウェアを使用してタスクを実行するために人間のリモート オペレーターを雇うのも同様に高価です。さらに、遠隔操作の効率は非常に低く、人間が直接タスクを完了できる速度よりもはるかに遅いです。
2. ヘッドマウント カメラを人々にストラップで固定し、肉を覆う大きなゴム手袋を着用してもらうと、さまざまな雑用を行っている人々の大規模なデータセットをすぐに収集できます。そしてタスク。普通の人は、日常生活の中で無意識のうちにさまざまな動作や操作タスクを実行します。生のモーション出力を直接認識することは困難ですが、ビデオ内のポーズの変化を分析することでアクションを推測できます。このタイプのデータ収集は、より高度なハードウェアが利用可能になるまで、汎用ロボットの開発の障壁を取り除くのに役立つ可能性があります。
3. インターネット上には一人称および三人称のビデオが多数あり、これらをロボットに訓練して、ビデオ内で人間が行うさまざまなアクティビティを認識および学習させることで、さらに拡張することができます。データサイズ。
この種のデータ収集を拡大する前に、5000 RPM で回転するモーターと比較して、私たちの身体には高速回転する部品がないことに注意することも重要です。 、筋肉の運動エネルギーは非常に低く、私たちが移動するときに運ぶ有効質量もはるかに小さいため、ロボットの関節角度は人間のそれとほぼ同じであっても、回転モーターによって提供される有効質量は、器用にタスクを実行するには大きすぎます。
効率的な動作制御戦略を開発したとしても、ロボットは、照明を簡単にオン/オフしたり、優雅に走ったりするなどの動作を実行する際に、依然として人間の速度と流暢さに達することはできません。これは、ロボットが物体に触れたときにかかる力が人間とは大きく異なるためです。
人間のビデオをロボットの動作戦略にすばやく変換したい場合は、次のメソッドが必要です:
1. NEO
のような非常に従順で柔軟なロボット 2. 「 」を直接コピーするのではなく、ロボットにビデオのモーション軌跡を 1 倍よりも遅い速度で追跡させます。ヒューマンハードウェア」のダイナミクス。ただし、これは静的な操作タスクにのみ適しており、衣服をたたむ、キッチンで食事を準備するなど、多くの物体との接触が必要なタスクには適していません。
3. 動作計画と動的計画を分離することで、動作計画は目標位置に到達することに重点を置き、動的計画は衝突時の力の制御に重点を置くことができます。
Atas ialah kandungan terperinci Betapa sukarnya robot menguasai kekuatan tangannya dan melakukan kerja rumah dengan selamat? Naib Presiden Kecerdasan Buatan 1X menulis penjelasan terperinci. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
Kenyataan:
Kandungan artikel ini disumbangkan secara sukarela oleh netizen, dan hak cipta adalah milik pengarang asal. Laman web ini tidak memikul tanggungjawab undang-undang yang sepadan. Jika anda menemui sebarang kandungan yang disyaki plagiarisme atau pelanggaran, sila hubungi admin@php.cn
Artikel sebelumnya:Mengintegrasikan lebih daripada 200 kajian berkaitan, semakan terkini model besar "pembelajaran sepanjang hayat" ada di siniArtikel seterusnya:Mengintegrasikan lebih daripada 200 kajian berkaitan, semakan terkini model besar "pembelajaran sepanjang hayat" ada di sini
Artikel berkaitan
Lihat lagi- Aliran teknologi untuk ditonton pada tahun 2023
- Cara Kecerdasan Buatan Membawa Kerja Baharu Setiap Hari kepada Pasukan Pusat Data
- Bolehkah kecerdasan buatan atau automasi menyelesaikan masalah kecekapan tenaga yang rendah dalam bangunan?
- Pengasas bersama OpenAI ditemu bual oleh Huang Renxun: Keupayaan penaakulan GPT-4 belum mencapai jangkaan
- Bing Microsoft mengatasi Google dalam trafik carian terima kasih kepada teknologi OpenAI