
Rumah >Peranti teknologi >AI >Sumber terbuka! V2Xverse: menyerahkan dan mengeluarkan platform simulasi pertama dan model hujung ke hujung untuk V2X
Sumber terbuka! V2Xverse: menyerahkan dan mengeluarkan platform simulasi pertama dan model hujung ke hujung untuk V2X

- PHPzasal
- 2024-06-10 12:42:28522semak imbas

Data pemanduan disegerakkan kerjasama kenderaan-jalan raya
Pemanduan autonomi bantuan kenderaan-ke-semuanya V2X-AD (Vehicle-to-everything-aided strategies dalam menyediakan pemanduan autonomi yang lebih selamat) mempunyai potensi besar pemanduan autonomi Penyelidik telah menjalankan banyak penyelidikan mengenai aspek komunikasi dan komunikasi V2X-AD, tetapi kesan infrastruktur dan sumber komunikasi ini dalam meningkatkan prestasi pemanduan masih belum diterokai sepenuhnya. Ini menyerlahkan keperluan untuk mengkaji pemanduan autonomi kolaboratif, iaitu, cara mereka bentuk strategi perkongsian maklumat yang cekap untuk perancangan pemanduan untuk meningkatkan prestasi pemanduan setiap kenderaan. Ini memerlukan dua syarat asas utama: satu ialah platform yang boleh menyediakan persekitaran data untuk V2X-AD, dan sistem pemanduan hujung ke hujung dengan fungsi berkaitan pemanduan yang lengkap dan mekanisme perkongsian maklumat. Dari segi platform yang menyediakan persekitaran data, ia boleh dicapai dengan menggunakan rangkaian komunikasi antara kenderaan dan sokongan infrastruktur. Dengan cara ini, kenderaan boleh berkongsi maklumat masa nyata dan persekitaran yang diperlukan untuk pemanduan, sekali gus meningkatkan prestasi pemanduan. Sebaliknya, sistem pemanduan hujung ke hujung perlu mempunyai fungsi pemanduan yang lengkap dan boleh berkongsi maklumat. Ini bermakna sistem pemanduan seharusnya boleh mendapatkan maklumat berkaitan pemanduan daripada kenderaan dan infrastruktur lain dan menggabungkan maklumat ini dengan perancangan pemanduannya sendiri untuk memberikan prestasi pemanduan yang lebih cekap. Semasa mencapai dua syarat asas ini, keselamatan dan perlindungan privasi juga perlu dipertimbangkan. Oleh itu, apabila mereka bentuk strategi perancangan pemanduan V2X-AD, kita harus menumpukan pada kecekapan strategi perkongsian maklumat dan dengan itu meningkatkan prestasi pemanduan setiap kenderaan. Ringkasnya, pemanduan autonomi dibantu kolaboratif kenderaan-jalan V2X-AD mempunyai potensi besar
" Atas sebab ini, penyelidik dari Universiti Jiao Tong Shanghai dan Makmal Kepintaran Buatan Shanghai menerbitkan artikel penyelidikan baharu "Ke Arah Pemanduan Autonomi Kolaboratif: Platform Simulasi" dan Sistem End-to-End" yang dicadangkan CoDriving: sistem pemanduan kolaboratif hujung ke hujung yang menggunakan strategi perkongsian maklumat untuk memacu perancangan untuk mencapai komunikasi dan kerjasama yang cekap. Pada masa yang sama, penyelidik dalam artikel ini membina platform simulasi. V2Xverse, platform ini menyediakan persekitaran latihan dan ujian yang lengkap untuk pemanduan kolaboratif, termasuk penjanaan set data pemanduan kolaboratif kenderaan-jalan, penggunaan sistem pemanduan kolaboratif timbunan penuh, dan penilaian prestasi pemanduan gelung tertutup dan penilaian tugas pemanduan dalam disesuaikan senario. "
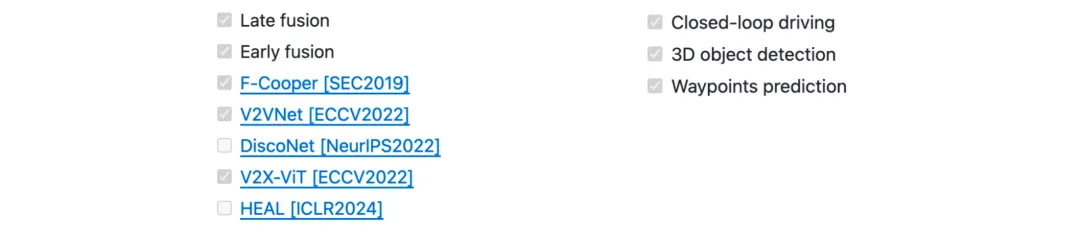
Pada masa yang sama, platform simulasi V2Xverse menyepadukan kod ujian latihan dan penggunaan berbilang kaedah penderiaan kolaboratif sedia ada, dan menggunakan pelbagai tugas ujian untuk menguji keupayaan pemanduan yang komprehensif: pengesanan sasaran 3D, perancangan laluan dan tertutup -gelung pemanduan autonomi. V2Xverse menerobos batasan kaedah penderiaan kolaboratif sedia ada yang hanya boleh "melihat" tetapi tidak "mengawal". Penyelidik artikel ini percaya bahawa ini akan membawa sambungan berfungsi yang lebih baik dan penanda aras ujian yang lebih sesuai untuk senario pemanduan sebenar untuk penyelidikan kerjasama kenderaan-jalan raya berasaskan penglihatan dalam pemanduan autonomi.
- Pautan kertas: https://arxiv.org/pdf/2404.09496
- Pautan kod: https://github.com/CollaborativePerception/V2Xverse
Pencarian latar belakang dan kepentingan
Pencarian ini artikel Fokus pada pemanduan autonomi kolaboratif berdasarkan komunikasi V2X (Kenderaan-ke-segala-galanya). Berbanding dengan pemanduan autonomi kenderaan tunggal, pemanduan autonomi kolaboratif meningkatkan persepsi kenderaan dan prestasi pemanduan melalui pertukaran maklumat antara kenderaan dan persekitaran sekitar (seperti unit tepi jalan, pejalan kaki yang dilengkapi peranti pintar, dll.), yang akan memberi manfaat kepada orang yang mempunyai penglihatan terhad . Pemanduan selamat dalam senario yang kompleks (Rajah 1). . Walau bagaimanapun, cara menggunakan keupayaan penderiaan koperasi untuk meningkatkan prestasi pemanduan akhir dalam sistem bersepadu masih kurang diterokai. 
Untuk menyelesaikan masalah ini, artikel ini bertujuan untuk mengembangkan keupayaan penderiaan kolaboratif ke dalam sistem pemanduan kolaboratif yang meliputi keupayaan pemanduan yang komprehensif, termasuk modul utama seperti persepsi, ramalan, perancangan dan kawalan. Mencapai pemanduan autonomi kolaboratif memerlukan dua asas utama: platform yang boleh menyediakan persekitaran data untuk V2X-AD dan yang kedua ialah sistem pemanduan hujung ke hujung yang menyepadukan fungsi berkaitan pemanduan yang lengkap dan mekanisme perkongsian maklumat; Dari perspektif platform, kerja ini membina V2Xverse, platform simulasi pemanduan autonomi kolaboratif komprehensif yang menyediakan proses lengkap daripada penjanaan set data pemanduan kolaboratif kenderaan-jalan kepada penggunaan sistem pemanduan kolaboratif susunan penuh dan penilaian prestasi pemanduan gelung tertutup . Dari perspektif sistem pemanduan, artikel ini memperkenalkan CoDriving, sistem pemanduan kolaboratif hujung-ke-hujung baharu yang mereka bentuk dan membenamkan modul kerjasama berasaskan komunikasi V2X dalam rangka kerja pemanduan autonomi yang lengkap untuk meningkatkan prestasi pemanduan kolaboratif dengan berkongsi maklumat deria. . Idea teras CoDriving ialah strategi perkongsian maklumat baharu untuk perancangan pemanduan, yang menggunakan maklumat ciri visual yang jarang tetapi penting untuk pemanduan sebagai kandungan komunikasi untuk mengoptimumkan kecekapan komunikasi sambil meningkatkan prestasi pemanduan.
V2Xverse: Platform simulasi pemanduan kolaboratif kenderaan jalan
Ciri utama V2Xverse yang dicadangkan dalam artikel ini ialah ia boleh merealisasikan penjanaan penanda aras luar talian bagi subtugas berkaitan pemanduan dan penilaian gelung tertutup dalam talian terhadap prestasi pemanduan dalam senario yang berbeza, menyokong sepenuhnya pembangunan Sistem pemanduan autonomi kolaboratif. Untuk mencipta adegan V2X-AD, V2Xverse menyediakan berbilang kereta pintar yang dilengkapi dengan keupayaan pemanduan lengkap di tempat kejadian, dan meletakkan unit tepi jalan di kedua-dua belah jalan melalui strategi tertentu untuk menyediakan penglihatan tambahan untuk kereta pintar. Untuk menyokong pembangunan kaedah pemanduan autonomi kolaboratif, V2Xverse mula-mula menyediakan modul komunikasi (kenderaan-kenderaan) dan (unit tepi jalan-kenderaan), dan menyediakan isyarat pemanduan lengkap dan anotasi pakar untuk latihan sistem, dan juga menyediakan penilaian pemanduan gelung tertutup Pelbagai senario berbahaya. Rangka kerja platform simulasi ditunjukkan dalam Rajah 2.
 Rajah 2. Rangka kerja platform simulasi V2Xverse
Rajah 2. Rangka kerja platform simulasi V2Xverse
Berbanding dengan platform simulasi pemanduan autonomi berasaskan Carla sedia ada, V2Xverse mempunyai tiga kelebihan. Pertama sekali, V2Xverse menyokong simulasi pemanduan berbilang kenderaan, manakala carla-leaderboard arus perdana dan platform terbitannya hanya menyokong simulasi pemanduan satu kenderaan. Kedua, V2Xverse menyokong simulasi fungsi pemanduan penuh, manakala platform simulasi persepsi kolaboratif sedia ada hanya menyokong fungsi yang berkaitan dengan modul persepsi. Ketiga, V2Xverse menyokong senario V2X-AD yang komprehensif, termasuk peranti penderia yang pelbagai, penyepaduan model dan penyesuaian senario yang fleksibel, lihat Jadual 1.
 Jadual 1. Perbandingan antara V2Xverse dan platform simulasi pemanduan autonomi berasaskan Carla sedia ada
Jadual 1. Perbandingan antara V2Xverse dan platform simulasi pemanduan autonomi berasaskan Carla sedia ada
CoDriving: Model pandu kendiri hujung ke hujung untuk kerjasama yang cekap
CoDriving termasuk dua komponen (lihat Rajah 1e). ) Rangkaian pemanduan autonomi basikal hujung ke hujung menukar input penderia kepada isyarat kawalan pemanduan 2) Kerjasama berorientasikan pemanduan, kolaborator mencapai komunikasi yang cekap dengan berkongsi ciri penderiaan utama untuk pemanduan, dan meningkatkan ciri pengesan BEV basikal melalui pengagregatan ciri, Persepsi yang dipertingkatkan ciri akan membantu sistem menghasilkan keputusan pengecaman persepsi yang lebih tepat dan keputusan ramalan perancangan.
 Rajah 3. Rangka kerja keseluruhan CoDriving
Rajah 3. Rangka kerja keseluruhan CoDriving
Rangkaian pemanduan autonomi hujung ke hujung
Rangkaian pemanduan autonomi kenderaan tunggal hujung ke hujung mempelajari ramalan titik laluan keluaran berdasarkan input daripada modaliti yang berbeza, dan menukar laluan melalui titik modul kawalan ditukar kepada isyarat kawalan memandu. Untuk mencapai matlamat ini, CoDriving menyepadukan komponen modular yang diperlukan untuk memandu ke dalam sistem hujung ke hujung, termasuk pengesan objek 3D, peramal titik laluan dan pengawal. CoDriving menggunakan perwakilan Bird's Eye View (BEV) kerana ia menyediakan sistem koordinat global yang bersatu, mengelakkan transformasi koordinat yang kompleks dan lebih baik menyokong kerjasama berdasarkan maklumat spatial.
Strategi kerjasama berorientasikan pemanduan
Kolaborasi V2X menyelesaikan masalah penglihatan terhad basikal yang tidak dapat dielakkan melalui perkongsian maklumat. Dalam kerja ini, kertas kerja ini mencadangkan strategi kerjasama berorientasikan pemanduan baharu untuk mengoptimumkan prestasi pemanduan dan kecekapan komunikasi secara serentak. Skim ini termasuk i) memacu komunikasi persepsi berasaskan niat, di mana CoDriving menukar ciri persepsi BEV yang jarang tetapi memandu kritikal melalui modul permintaan pemanduan dan ii) peningkatan ciri BEV, di mana CoDriving menggunakan maklumat ciri yang diterima untuk meningkatkan prestasi setiap; ciri persepsi BEV. Ciri BEV yang dipertingkatkan akan membantu sistem menghasilkan keputusan pengecaman persepsi yang lebih tepat dan keputusan ramalan perancangan.
Hasil eksperimen
Menggunakan platform simulasi V2Xverse, artikel ini menguji prestasi CoDriving pada tiga tugas: pemanduan gelung tertutup, pengesanan sasaran 3D dan ramalan titik laluan. Dalam ujian pemanduan gelung tertutup utama, berbanding dengan kaedah pemanduan autonomi SOTA hujung ke hujung kenderaan tunggal sebelumnya, skor pemanduan CoDriving meningkat dengan ketara sebanyak 62.49%, dan kadar perlanggaran pejalan kaki menurun sebanyak 53.50%. Dalam pengesanan sasaran dan tugas ramalan titik laluan, CoDriving berprestasi lebih baik daripada kaedah kolaboratif lain, seperti yang ditunjukkan dalam Jadual 2.
 Jadual 2. CoDriving adalah lebih baik daripada kaedah pemanduan tunggal SOTA dalam tugas pemanduan gelung tertutup, dan lebih baik daripada kaedah penderiaan kolaboratif lain dalam subtugas penderiaan dan perancangan modular
Jadual 2. CoDriving adalah lebih baik daripada kaedah pemanduan tunggal SOTA dalam tugas pemanduan gelung tertutup, dan lebih baik daripada kaedah penderiaan kolaboratif lain dalam subtugas penderiaan dan perancangan modular
Kertas kerja ini juga mengkaji kerjasama CoDriving di bawah jalur lebar komunikasi yang berbeza Prestasi telah disahkan. Dalam tiga tugas pemanduan gelung tertutup, pengesanan sasaran 3D dan ramalan titik laluan, CoDriving mengatasi kaedah kerjasama lain di bawah kekangan lebar jalur komunikasi yang berbeza, seperti yang ditunjukkan dalam Rajah 4.
 Rajah 4. Prestasi kerjasama CoDriving di bawah jalur lebar komunikasi yang berbeza
Rajah 4. Prestasi kerjasama CoDriving di bawah jalur lebar komunikasi yang berbeza
Rajah 5 menunjukkan kes pemanduan CoDriving dalam persekitaran simulasi V2Xverse. Dalam adegan dalam Rajah 5, seorang pejalan kaki di tempat buta tiba-tiba meluru keluar dari jalan raya Dapat dilihat basikal pandu sendiri itu mempunyai penglihatan yang terhad dan tidak dapat mengelak pejalan kaki terlebih dahulu, menyebabkan kereta serius. kemalangan. CoDriving menggunakan ciri penglihatan kongsi unit tepi jalan untuk mengesan pejalan kaki lebih awal dan mengelakkannya dengan selamat.
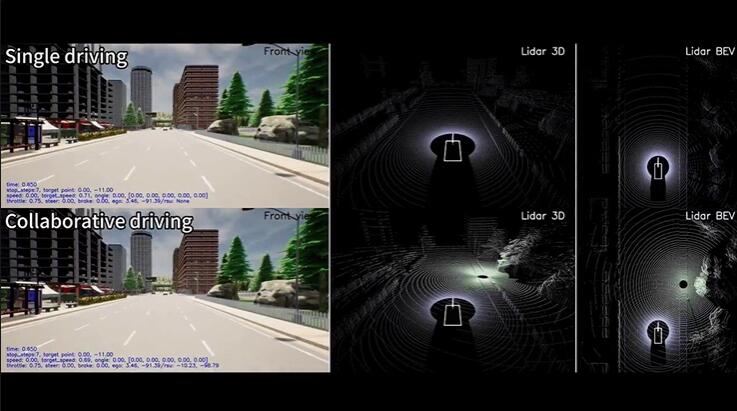
Rajah 5(1) Berbanding dengan basikal pandu sendiri dengan penglihatan terhad, CoDriving menggunakan maklumat yang disediakan oleh unit tepi jalan untuk mengesan pejalan kaki di tempat buta Rajah 5(2). memandu basikal Kegagalan mengelak tepat pada masanya menyebabkan perlanggaran
Rajah 5(2). memandu basikal Kegagalan mengelak tepat pada masanya menyebabkan perlanggaran
Ringkasan
Kerja ini membantu pembangunan kaedah pemanduan autonomi kolaboratif dengan membina platform simulasi V2Xverse, dan mencadangkan sistem pemanduan autonomi hujung ke hujung baharu. Antaranya, V2Xverse ialah platform simulasi pemanduan kolaboratif V2X yang menyokong ujian pemanduan gelung tertutup Platform ini menyediakan saluran pembangunan lengkap untuk pembangunan sistem pemanduan autonomi kolaboratif dengan matlamat untuk meningkatkan prestasi pemanduan akhir. Perlu dinyatakan bahawa V2Xverse juga menyokong penggunaan pelbagai sistem pemanduan autonomi kenderaan tunggal sedia ada, serta latihan dan ujian pemanduan gelung tertutup bagi pelbagai kaedah pengesanan kolaboratif sedia ada. Pada masa yang sama, kertas kerja ini mencadangkan sistem pemanduan autonomi kolaboratif hujung-ke-hujung baharu, CoDriving, yang meningkatkan prestasi pemanduan dan mengoptimumkan kecekapan komunikasi dengan berkongsi maklumat persepsi pemanduan utama. Penilaian menyeluruh terhadap keseluruhan sistem pemanduan menunjukkan bahawa CoDriving jauh lebih baik daripada sistem pandu sendiri kenderaan tunggal pada lebar jalur komunikasi yang berbeza. Penyelidik artikel ini percaya bahawa platform V2Xverse dan sistem CoDriving menyediakan penyelesaian yang berpotensi untuk pemanduan autonomi yang lebih dipercayai.
Atas ialah kandungan terperinci Sumber terbuka! V2Xverse: menyerahkan dan mengeluarkan platform simulasi pertama dan model hujung ke hujung untuk V2X. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!