



심층 이미지 데이터 세트는 딥 러닝 및 컴퓨터 비전 작업에서 매우 중요한 데이터 유형입니다. 각 픽셀에 대한 깊이 정보를 포함하고 있으며 장면 재구성, 객체 감지, 포즈 추정 등 다양한 애플리케이션에 사용할 수 있습니다. 이 기사에서는 소스, 특성 및 응용 프로그램을 포함하여 일반적으로 사용되는 몇 가지 깊이 이미지 데이터 세트를 소개합니다.
1.NYU Depth V2
NYU Depth V2 데이터 세트에는 총 1449개의 장면 샘플과 함께 실내 장면의 깊이 이미지와 RGB 이미지가 포함되어 있습니다. 이러한 장면에는 침실, 거실, 주방 등 다양한 실내 환경이 포함됩니다. 각 장면은 카메라 자세 추정 및 장면 재구성과 같은 작업에 사용할 수 있는 카메라의 내부 및 외부 매개변수 정보를 제공합니다. 또한, 데이터 세트는 장면 내 객체에 대한 주석 정보도 제공하며, 이는 객체 감지 및 의미 분할과 같은 작업에 사용될 수 있습니다.
2.Kinect Fusion
Kinect Fusion 데이터세트는 여러 장면의 RGB-D 이미지와 해당 3D 모델을 제공하며 장면 재구성, 3D 포즈 추정, 객체 감지 등의 작업에 적합합니다. 또한 데이터 세트는 Microsoft Kinect, Asus Xtion Pro Live 및 Primesense Carmine 1.08과 같은 장치를 포함한 여러 깊이 센서의 데이터 형식도 지원합니다. 이 데이터는 연구원과 개발자에게 딥 러닝, 컴퓨터 비전, 로봇 공학과 같은 분야의 연구 개발을 위한 풍부한 리소스를 제공합니다.
3.SUN RGB-D
SUN RGB-D에는 실내 및 실외 장면에 대한 RGB-D 이미지와 장면 주석 정보가 포함되어 있습니다. 데이터 세트에는 총 10,335개의 장면 샘플이 포함되어 있으며, 그 중 5,285개는 실내 장면이고 5,050개는 실외 장면입니다. 각 장면은 카메라 자세 추정 및 장면 재구성과 같은 작업에 사용할 수 있는 카메라 내부 및 외부 매개변수 정보를 제공합니다. 또한 이 데이터 세트는 객체 카테고리, 의미 분할, 장면 레이아웃 등을 포함한 다양한 장면 주석 정보도 제공하여 객체 감지, 의미 분할, 장면 이해 등의 작업에 사용할 수 있습니다.
4.ScanNet
ScanNet에는 실내 장면의 RGB-D 이미지와 장면 주석 정보가 포함되어 있습니다. 데이터 세트에는 사무실, 상점, 학교 등 다양한 실내 환경을 포괄하는 총 1,513개의 장면 샘플이 포함되어 있습니다. 각 장면은 카메라 자세 추정 및 장면 재구성과 같은 작업에 사용할 수 있는 카메라 내부 및 외부 매개변수 정보를 제공합니다. 또한 이 데이터 세트는 객체 카테고리, 의미 분할, 장면 레이아웃 등을 포함한 다양한 장면 주석 정보도 제공하여 객체 감지, 의미 분할, 장면 이해 등의 작업에 사용할 수 있습니다.
5.3DMatch
3DMatch에는 여러 RGB-D 센서의 깊이 이미지와 3D 포인트 클라우드 데이터가 포함되어 있습니다. 데이터 세트에는 다양한 실내 및 실외 환경을 포괄하는 총 1,525개의 장면 샘플이 포함되어 있습니다. 각 장면은 카메라 자세 추정 및 장면 재구성과 같은 작업에 사용할 수 있는 카메라 내부 및 외부 매개변수 정보를 제공합니다. 또한 이 데이터 세트는 포인트 클라우드 등록 및 이미지 등록을 포함하여 풍부한 장면 등록 정보를 제공하며 이는 3D 재구성 및 장면 일치와 같은 작업에 사용할 수 있습니다.
간단히 말하면 깊이 이미지 데이터 세트는 딥 러닝 및 컴퓨터 비전 분야에서 없어서는 안 될 데이터 유형입니다. 장면 재구성, 객체 감지, 포즈 추정, 의미론적 분할 등 다양한 작업에 사용할 수 있습니다. 위에 소개된 데이터 세트는 모두 일반적으로 사용되는 깊이 이미지 데이터 세트이며, 해당 소스는 확실하고 신뢰할 수 있으며 특정 작업의 필요에 따라 훈련 및 평가에 적합한 데이터 세트를 선택할 수 있습니다.
위 내용은 깊이 이미지 데이터세트 소개의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 AI Index 2025 읽기 : AI는 친구, 적 또는 부조종사입니까?Apr 11, 2025 pm 12:13 PM
AI Index 2025 읽기 : AI는 친구, 적 또는 부조종사입니까?Apr 11, 2025 pm 12:13 PMStanford University Institute for Human-Oriented Intificial Intelligence가 발표 한 2025 인공 지능 지수 보고서는 진행중인 인공 지능 혁명에 대한 훌륭한 개요를 제공합니다. 인식 (무슨 일이 일어나고 있는지 이해), 감사 (혜택보기), 수용 (얼굴 도전) 및 책임 (우리의 책임 찾기)의 네 가지 간단한 개념으로 해석합시다. 인지 : 인공 지능은 어디에나 있고 빠르게 발전하고 있습니다 인공 지능이 얼마나 빠르게 발전하고 확산되고 있는지 잘 알고 있어야합니다. 인공 지능 시스템은 끊임없이 개선되어 수학 및 복잡한 사고 테스트에서 우수한 결과를 얻고 있으며 1 년 전만해도 이러한 테스트에서 비참하게 실패했습니다. AI 복잡한 코딩 문제 또는 대학원 수준의 과학적 문제를 해결한다고 상상해보십시오-2023 년 이후
 Meta Llama 3.2- 분석 Vidhya를 시작합니다Apr 11, 2025 pm 12:04 PM
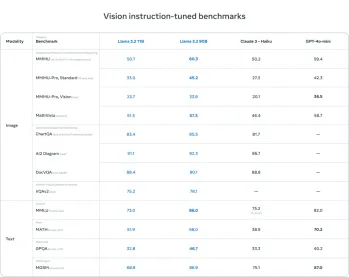
Meta Llama 3.2- 분석 Vidhya를 시작합니다Apr 11, 2025 pm 12:04 PM메타의 라마 3.2 : 멀티 모달 및 모바일 AI의 도약 Meta는 최근 AI에서 강력한 비전 기능과 모바일 장치에 최적화 된 가벼운 텍스트 모델을 특징으로하는 AI의 상당한 발전 인 Llama 3.2를 공개했습니다. 성공을 바탕으로 o
 AV 바이트 : Meta ' S Llama 3.2, Google의 Gemini 1.5 등Apr 11, 2025 pm 12:01 PM
AV 바이트 : Meta ' S Llama 3.2, Google의 Gemini 1.5 등Apr 11, 2025 pm 12:01 PM이번 주 AI 환경 : 발전의 회오리 바람, 윤리적 고려 사항 및 규제 토론. OpenAi, Google, Meta 및 Microsoft와 같은 주요 플레이어
 기계와 대화하는 사람의 비용 : 챗봇이 실제로 신경 쓰일 수 있습니까?Apr 11, 2025 pm 12:00 PM
기계와 대화하는 사람의 비용 : 챗봇이 실제로 신경 쓰일 수 있습니까?Apr 11, 2025 pm 12:00 PM연결의 편안한 환상 : 우리는 AI와의 관계에서 진정으로 번성하고 있습니까? 이 질문은 MIT Media Lab의 "AI (AI)를 사용하여 인간의 발전"심포지엄의 낙관적 톤에 도전했습니다. 이벤트는 절단 -EDG를 보여주었습니다
 파이썬의 Scipy 라이브러리 이해Apr 11, 2025 am 11:57 AM
파이썬의 Scipy 라이브러리 이해Apr 11, 2025 am 11:57 AM소개 차등 방정식, 최적화 문제 또는 푸리에 분석과 같은 복잡한 문제를 해결하는 과학자 또는 엔지니어라고 상상해보십시오. Python의 사용 편의성 및 그래픽 기능은 매력적이지만 이러한 작업에는 강력한 도구가 필요합니다.
 LLAMA 3.2를 실행하는 3 가지 방법 분석 VidhyaApr 11, 2025 am 11:56 AM
LLAMA 3.2를 실행하는 3 가지 방법 분석 VidhyaApr 11, 2025 am 11:56 AM메타의 라마 3.2 : 멀티 모달 AI 강국 Meta의 최신 멀티 모드 모델 인 LLAMA 3.2는 AI의 상당한 발전으로 향상된 언어 이해력, 개선 된 정확도 및 우수한 텍스트 생성 기능을 자랑합니다. 그것의 능력 t
 Dagster와 데이터 품질 검사 자동화Apr 11, 2025 am 11:44 AM
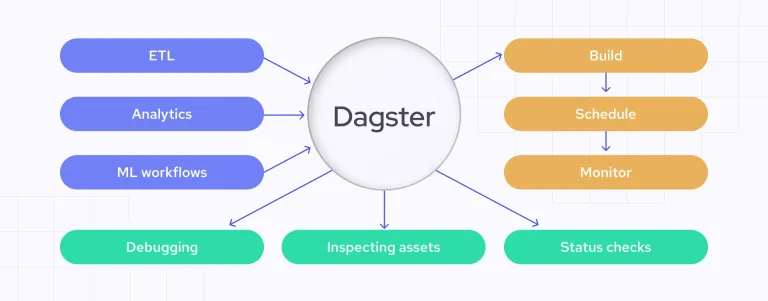
Dagster와 데이터 품질 검사 자동화Apr 11, 2025 am 11:44 AM데이터 품질 보증 : Dagster로 점검 자동화 및 큰 기대치 데이터 품질이 높다는 것은 데이터 중심 비즈니스에 중요합니다. 데이터 볼륨 및 소스가 증가함에 따라 수동 품질 관리는 비효율적이며 오류가 발생하기 쉽습니다.
 메인 프레임은 AI 시대에 역할을합니까?Apr 11, 2025 am 11:42 AM
메인 프레임은 AI 시대에 역할을합니까?Apr 11, 2025 am 11:42 AM메인 프레임 : AI 혁명의 이름없는 영웅 서버는 일반 목적 애플리케이션 및 여러 클라이언트를 처리하는 데 탁월하지만 메인 프레임은 대량의 미션 크리티컬 작업을 위해 구축됩니다. 이 강력한 시스템은 자주 무거움에서 발견됩니다


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

MinGW - Windows용 미니멀리스트 GNU
이 프로젝트는 osdn.net/projects/mingw로 마이그레이션되는 중입니다. 계속해서 그곳에서 우리를 팔로우할 수 있습니다. MinGW: GCC(GNU Compiler Collection)의 기본 Windows 포트로, 기본 Windows 애플리케이션을 구축하기 위한 무료 배포 가능 가져오기 라이브러리 및 헤더 파일로 C99 기능을 지원하는 MSVC 런타임에 대한 확장이 포함되어 있습니다. 모든 MinGW 소프트웨어는 64비트 Windows 플랫폼에서 실행될 수 있습니다.

PhpStorm 맥 버전
최신(2018.2.1) 전문 PHP 통합 개발 도구

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

SublimeText3 영어 버전
권장 사항: Win 버전, 코드 프롬프트 지원!

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

