




정책 반복과 값 반복은 강화 학습에서 일반적으로 사용되는 두 가지 알고리즘입니다. 정책 반복은 정책을 반복적으로 개선하여 에이전트의 성능을 향상시킵니다. Value iteration은 최적의 상태값을 얻기 위해 상태값 함수를 반복적으로 업데이트합니다. 두 가지의 핵심 아이디어는 다르지만 둘 다 강화 학습 작업에서 전략을 최적화하는 역할을 할 수 있습니다.
전략 반복
전략 반복은 안정적인 전략에 도달할 때까지 반복을 통해 점차적으로 전략을 개선합니다. 정책 반복에서는 정책이 먼저 초기화된 후 여러 반복을 통해 점차적으로 개선됩니다. 각 반복은 현재 전략을 평가하고 현재 전략을 개선하는 두 단계로 구성됩니다. 현재 전략을 평가하는 목적은 현재 전략의 기대 보상 가치를 계산하는 것이며, 이는 몬테카를로 방법이나 시간차 방법을 통해 얻을 수 있습니다. 현재 전략을 개선하는 목적은 현재 전략을 대체할 수 있는 더 나은 전략을 찾는 것인데, 이는 결정론적 정책 경사법이나 몬테카를로 정책 경사법을 통해 달성할 수 있습니다.
값 반복
값 반복은 안정적인 상태 값 함수를 달성하기 위해 반복을 통해 상태 값 함수를 점진적으로 업데이트하는 것입니다. 값 반복에서는 상태값 함수를 먼저 초기화한 후 여러 번의 반복을 통해 함수가 점진적으로 업데이트됩니다. 각 반복은 현재 상태 가치 함수의 예상 보상 값을 계산하고 현재 상태 가치 함수를 업데이트하는 두 단계로 구성됩니다. 현재상태가치함수의 기대보상값을 계산하는 목적은 각 상태의 보상기대값을 구하는 것이며, 이는 몬테카를로법이나 시간차법으로 얻을 수 있다. 몬테카를로 방법은 다수의 실제 경험을 시뮬레이션하여 보상 기대값을 추정하는 반면, 시간차 방법은 현재 추정값과 다음 상태 추정값의 차이를 이용하여 기대 보상값을 업데이트합니다. 현재 상태 값 함수를 업데이트하는 목적은 현재 함수를 대체할 수 있는 더 나은 상태 값 함수를 찾는 것인데, 이는 벨만 방정식을 통해 달성할 수 있습니다. 벨만 방정식은 현재 상태의 보상과 다음 상태의 예상 보상을 누적하여 현재 상태의 가치 함수를 계산합니다. Bellman 방정식을 지속적으로 적용함으로써 안정적인 상태 가치 함수에 도달할 때까지 상태 가치 함수가 점진적으로 업데이트될 수 있습니다. 가치 반복은 강화 학습에서 최적의 정책을 찾는 효율적인 방법입니다. 상태 가치 함수를 점진적으로 업데이트함으로써 가치 반복은 누적 보상을 최대화하는 최적의 정책을 찾을 수 있습니다.
정책 반복과 가치 반복의 차이점
정책 반복과 가치 반복은 모두 강화 학습에서 흔히 사용되는 방법이지만 구현 방법과 목표에는 분명한 차이가 있습니다.
1. 구현 방법
전략 반복은 전략을 지속적으로 업데이트하여 최적의 전략을 찾는 전략 기반 방법입니다. 구체적으로 전략 반복은 전략 평가와 전략 개선이라는 두 단계로 구성됩니다. 정책 평가에서는 현재 정책을 통해 각 국가의 가치 함수를 평가하고, 정책 개선에서는 현재 상태의 가치 함수를 기반으로 정책을 업데이트하여 정책을 최적의 정책에 가깝게 만듭니다.
가치 반복은 가치 함수 기반 방법으로, 가치 함수를 지속적으로 업데이트하여 최적의 전략을 찾는 것입니다. 구체적으로, 가치 반복은 가치 함수가 수렴할 때까지 각 상태의 가치 함수를 반복적으로 업데이트합니다. 그러면 최종 가치 함수를 기반으로 최적의 전략을 얻을 수 있습니다.
2. 목표
전략 반복의 목표는 전략을 지속적으로 반복적으로 업데이트하여 직접적으로 최적화하고 최적의 전략에 접근하는 것입니다. 그러나 매 iteration마다 정책 평가와 정책 개선이 필요하기 때문에 계산량이 크다.
가치 반복의 목표는 상태 가치 함수를 최적화하여 최적의 전략을 얻는 것입니다. 각 상태의 가치함수를 지속적으로 업데이트하여 최적의 가치함수를 근사화하고, 이 최적의 가치함수를 기반으로 최적의 전략을 도출합니다. 정책 반복과 비교하여 값 반복에는 계산이 덜 필요합니다.
3. 수렴 속도
일반적으로 정책 반복은 일반적으로 최적의 정책으로 더 빠르게 수렴되지만 각 반복에는 일반적으로 더 많은 계산이 필요합니다. 값 반복에는 수렴하기 위해 더 많은 반복이 필요할 수 있습니다.
4. 다른 기술과의 상호 작용
값 반복은 값 함수 최적화에 중점을 두기 때문에 함수 근사 방법(예: 딥 러닝)과 결합하기가 더 쉽습니다. 정책 반복은 명확한 모델이 있는 시나리오에서 더 일반적으로 사용됩니다.
위 내용은 정책 반복 및 가치 반복: 강화 학습의 주요 방법의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

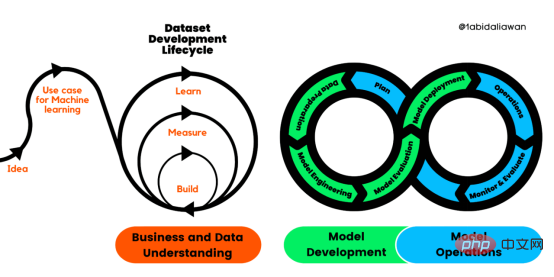 解读CRISP-ML(Q):机器学习生命周期流程Apr 08, 2023 pm 01:21 PM
解读CRISP-ML(Q):机器学习生命周期流程Apr 08, 2023 pm 01:21 PM译者 | 布加迪审校 | 孙淑娟目前,没有用于构建和管理机器学习(ML)应用程序的标准实践。机器学习项目组织得不好,缺乏可重复性,而且从长远来看容易彻底失败。因此,我们需要一套流程来帮助自己在整个机器学习生命周期中保持质量、可持续性、稳健性和成本管理。图1. 机器学习开发生命周期流程使用质量保证方法开发机器学习应用程序的跨行业标准流程(CRISP-ML(Q))是CRISP-DM的升级版,以确保机器学习产品的质量。CRISP-ML(Q)有六个单独的阶段:1. 业务和数据理解2. 数据准备3. 模型
 2023年机器学习的十大概念和技术Apr 04, 2023 pm 12:30 PM
2023年机器学习的十大概念和技术Apr 04, 2023 pm 12:30 PM机器学习是一个不断发展的学科,一直在创造新的想法和技术。本文罗列了2023年机器学习的十大概念和技术。 本文罗列了2023年机器学习的十大概念和技术。2023年机器学习的十大概念和技术是一个教计算机从数据中学习的过程,无需明确的编程。机器学习是一个不断发展的学科,一直在创造新的想法和技术。为了保持领先,数据科学家应该关注其中一些网站,以跟上最新的发展。这将有助于了解机器学习中的技术如何在实践中使用,并为自己的业务或工作领域中的可能应用提供想法。2023年机器学习的十大概念和技术:1. 深度神经网
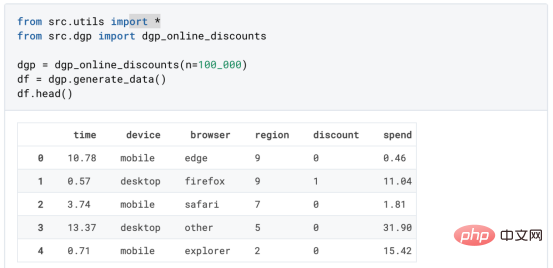 基于因果森林算法的决策定位应用Apr 08, 2023 am 11:21 AM
基于因果森林算法的决策定位应用Apr 08, 2023 am 11:21 AM译者 | 朱先忠审校 | 孙淑娟在我之前的博客中,我们已经了解了如何使用因果树来评估政策的异质处理效应。如果你还没有阅读过,我建议你在阅读本文前先读一遍,因为我们在本文中认为你已经了解了此文中的部分与本文相关的内容。为什么是异质处理效应(HTE:heterogenous treatment effects)呢?首先,对异质处理效应的估计允许我们根据它们的预期结果(疾病、公司收入、客户满意度等)选择提供处理(药物、广告、产品等)的用户(患者、用户、客户等)。换句话说,估计HTE有助于我
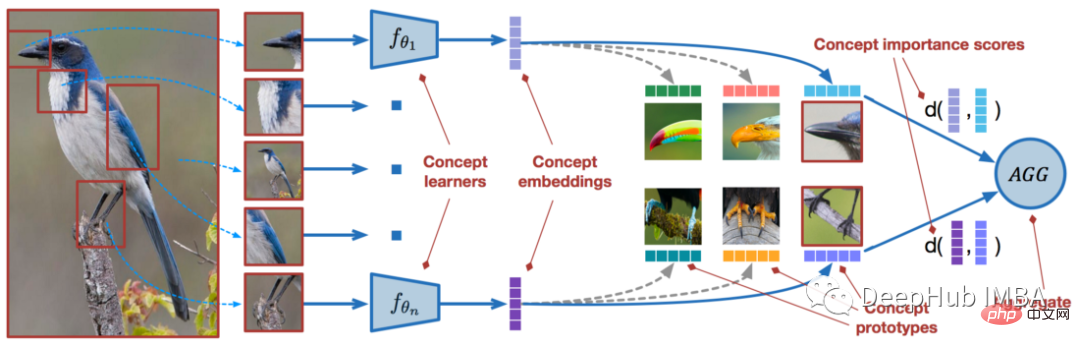 使用PyTorch进行小样本学习的图像分类Apr 09, 2023 am 10:51 AM
使用PyTorch进行小样本学习的图像分类Apr 09, 2023 am 10:51 AM近年来,基于深度学习的模型在目标检测和图像识别等任务中表现出色。像ImageNet这样具有挑战性的图像分类数据集,包含1000种不同的对象分类,现在一些模型已经超过了人类水平上。但是这些模型依赖于监督训练流程,标记训练数据的可用性对它们有重大影响,并且模型能够检测到的类别也仅限于它们接受训练的类。由于在训练过程中没有足够的标记图像用于所有类,这些模型在现实环境中可能不太有用。并且我们希望的模型能够识别它在训练期间没有见到过的类,因为几乎不可能在所有潜在对象的图像上进行训练。我们将从几个样本中学习
 LazyPredict:为你选择最佳ML模型!Apr 06, 2023 pm 08:45 PM
LazyPredict:为你选择最佳ML模型!Apr 06, 2023 pm 08:45 PM本文讨论使用LazyPredict来创建简单的ML模型。LazyPredict创建机器学习模型的特点是不需要大量的代码,同时在不修改参数的情况下进行多模型拟合,从而在众多模型中选出性能最佳的一个。 摘要本文讨论使用LazyPredict来创建简单的ML模型。LazyPredict创建机器学习模型的特点是不需要大量的代码,同时在不修改参数的情况下进行多模型拟合,从而在众多模型中选出性能最佳的一个。本文包括的内容如下:简介LazyPredict模块的安装在分类模型中实施LazyPredict
 Mango:基于Python环境的贝叶斯优化新方法Apr 08, 2023 pm 12:44 PM
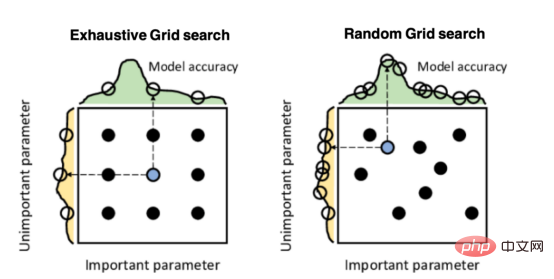
Mango:基于Python环境的贝叶斯优化新方法Apr 08, 2023 pm 12:44 PM译者 | 朱先忠审校 | 孙淑娟引言模型超参数(或模型设置)的优化可能是训练机器学习算法中最重要的一步,因为它可以找到最小化模型损失函数的最佳参数。这一步对于构建不易过拟合的泛化模型也是必不可少的。优化模型超参数的最著名技术是穷举网格搜索和随机网格搜索。在第一种方法中,搜索空间被定义为跨越每个模型超参数的域的网格。通过在网格的每个点上训练模型来获得最优超参数。尽管网格搜索非常容易实现,但它在计算上变得昂贵,尤其是当要优化的变量数量很大时。另一方面,随机网格搜索是一种更快的优化方法,可以提供更好的
 人工智能自动获取知识和技能,实现自我完善的过程是什么Aug 24, 2022 am 11:57 AM
人工智能自动获取知识和技能,实现自我完善的过程是什么Aug 24, 2022 am 11:57 AM实现自我完善的过程是“机器学习”。机器学习是人工智能核心,是使计算机具有智能的根本途径;它使计算机能模拟人的学习行为,自动地通过学习来获取知识和技能,不断改善性能,实现自我完善。机器学习主要研究三方面问题:1、学习机理,人类获取知识、技能和抽象概念的天赋能力;2、学习方法,对生物学习机理进行简化的基础上,用计算的方法进行再现;3、学习系统,能够在一定程度上实现机器学习的系统。
 超参数优化比较之网格搜索、随机搜索和贝叶斯优化Apr 04, 2023 pm 12:05 PM
超参数优化比较之网格搜索、随机搜索和贝叶斯优化Apr 04, 2023 pm 12:05 PM本文将详细介绍用来提高机器学习效果的最常见的超参数优化方法。 译者 | 朱先忠审校 | 孙淑娟简介通常,在尝试改进机器学习模型时,人们首先想到的解决方案是添加更多的训练数据。额外的数据通常是有帮助(在某些情况下除外)的,但生成高质量的数据可能非常昂贵。通过使用现有数据获得最佳模型性能,超参数优化可以节省我们的时间和资源。顾名思义,超参数优化是为机器学习模型确定最佳超参数组合以满足优化函数(即,给定研究中的数据集,最大化模型的性能)的过程。换句话说,每个模型都会提供多个有关选项的调整“按钮


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

SecList
SecLists는 최고의 보안 테스터의 동반자입니다. 보안 평가 시 자주 사용되는 다양한 유형의 목록을 한 곳에 모아 놓은 것입니다. SecLists는 보안 테스터에게 필요할 수 있는 모든 목록을 편리하게 제공하여 보안 테스트를 더욱 효율적이고 생산적으로 만드는 데 도움이 됩니다. 목록 유형에는 사용자 이름, 비밀번호, URL, 퍼징 페이로드, 민감한 데이터 패턴, 웹 셸 등이 포함됩니다. 테스터는 이 저장소를 새로운 테스트 시스템으로 간단히 가져올 수 있으며 필요한 모든 유형의 목록에 액세스할 수 있습니다.

ZendStudio 13.5.1 맥
강력한 PHP 통합 개발 환경

에디트플러스 중국어 크랙 버전
작은 크기, 구문 강조, 코드 프롬프트 기능을 지원하지 않음

