

 기술 주변기기일체 포함Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.
기술 주변기기일체 포함Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.

VidSGG(비디오 장면 그래프 생성)는 시각적 장면에서 개체를 식별하고 개체 간의 시각적 관계를 추론하는 것을 목표로 합니다.
이 작업을 수행하려면 장면 전체에 흩어져 있는 각 개체에 대한 포괄적인 이해뿐만 아니라 시간에 따른 개체의 움직임과 상호 작용에 대한 심층적인 연구가 필요합니다.
최근 Sun Yat-sen University의 연구자들은 최고의 인공 지능 저널인 IEEE T-IP에 논문을 게재했습니다. 그들은 관련 작업을 탐색한 결과 다음과 같은 사실을 발견했습니다. 각 개체 조합 쌍과 그 관계는 각각 공간 공동이 있습니다. -이미지 내 발생 상관관계, 서로 다른 이미지 간의 시간적 일관성/번역 상관관계.

논문 링크: https://arxiv.org/abs/2309.13237
연구진은 이러한 사전 지식을 바탕으로 사전 시공간 지식을 통합하기 위한 시공간 지식 임베딩 기반의 Transformer(STKET)를 제안했습니다. 지식은 다중 헤드 교차 주의 메커니즘에 통합되어 보다 대표적인 시각적 관계 표현을 학습합니다.
구체적으로, 공간적 동시발생과 시간적 변환 상관관계를 먼저 통계적으로 학습한 다음, 시공간적 지식 임베딩 레이어를 설계하여 시각적 표현과 지식 간의 상호작용을 완전히 탐색하고 각각 공간적 및 시간적 지식 임베딩을 생성합니다. 마지막으로 저자는 이러한 특징을 집계하여 최종 의미 라벨과 시각적 관계를 예측합니다.
많은 실험을 통해 이 기사에서 제안한 프레임워크가 현재 경쟁 알고리즘보다 훨씬 우수하다는 것을 알 수 있습니다. 현재 논문이 승인되었습니다.
논문 개요
장면 이해 분야의 급속한 발전과 함께 많은 연구자들이 장면 그래프 생성(SGG) 작업을 해결하기 위해 다양한 프레임워크를 사용하기 시작했으며 좋은 진전을 이루었습니다.
그러나 이러한 방법은 종종 단일 이미지만 고려하고 시계열에 존재하는 많은 양의 상황 정보를 무시하므로 대부분의 기존 장면 그래프 생성 알고리즘은 특정 비디오에 포함된 콘텐츠를 정확하게 식별할 수 없습니다. 시각적 관계.
따라서 많은 연구자들은 이 문제를 해결하기 위해 VidSGG(비디오 장면 그래프 생성) 알고리즘 개발에 전념하고 있습니다.
현재 작업은 주로 공간적, 시간적 관점에서 객체 수준의 시각적 정보를 수집하여 해당 시각적 관계 표현을 학습하는 데 중점을 두고 있습니다.
다양한 사물의 시각적 외양과 인터랙티브 액션의 큰 차이와 비디오 수집으로 인한 시각적 관계의 상당한 롱테일 분포로 인해 단순히 시각적 정보만 사용하는 것만으로도 모델이 잘못된 시각적인 것을 예측하는 결과를 낳기 쉽습니다. 관계.
위 문제에 대응하여 연구자들은 다음과 같은 두 가지 작업 측면을 수행했습니다.
첫째, 비디오 장면 그래프 생성 분야를 홍보하기 위해 훈련 샘플에 포함된 사전 시공간 지식을 마이닝하는 것이 제안되었습니다. 그중 사전 시공간 지식에는 다음이 포함됩니다.
1) 공간 동시 발생 상관: 특정 객체 범주 간의 관계는 특정 상호 작용으로 이어지는 경향이 있습니다.
2) 시간적 일관성/전환 상관 관계: 주어진 관계 쌍은 연속된 비디오 클립 전체에서 일관성을 유지하는 경향이 있거나 다른 특정 관계로 전환될 가능성이 높습니다.
두 번째로, 시공간 지식 임베딩 기반의 새로운 Transformer(Spatial-Temporal Knowledge-Embedded Transformer, STKET) 프레임워크를 제안합니다.
이 프레임워크는 사전 시공간 지식을 다중 헤드 교차 주의 메커니즘에 통합하여 보다 대표적인 시각적 관계 표현을 학습합니다. 테스트 벤치마크에서 얻은 비교 결과에 따르면, 연구진이 제안한 STKET 프레임워크가 기존의 최신 방법보다 성능이 우수하다는 것을 알 수 있습니다.

그림 1: 가변적인 시각적 외관과 시각적 관계의 롱테일 분포로 인해 비디오 장면 그래프 생성은 어려움으로 가득 차 있습니다.
시공간 지식 임베딩 기반 트랜스포머
공간 및 시간 지식 표현
시각적 관계를 추론할 때 인간은 시각적 단서뿐만 아니라 축적된 사전 지식도 활용합니다[1, 2]. 이에 영감을 받아 연구자들은 비디오 장면 그래프 생성 작업을 용이하게 하기 위해 훈련 세트에서 직접 사전 시공간 지식을 추출할 것을 제안합니다.
그 중에서 공간적 동시발생 상관관계는 주어진 물체가 결합될 때 그 시각적 관계 분포가 매우 편향된다는 점에서 구체적으로 나타납니다. (예를 들어 "사람"과 "컵" 사이의 시각적 관계 분포는 "개" 및 "개"와는 분명히 다름) "장난감" 간의 분포와 시간 전달 상관관계는 이전 순간의 시각적 관계가 주어지면 각 시각적 관계의 전환 확률이 크게 변경된다는 점에서 구체적으로 나타납니다. 예를 들어, 이전 순간의 시각적 관계가 "먹다"로 알려졌을 때, 다음 순간에 시각적 관계가 "쓰기"로 전환될 확률은 크게 감소합니다.
그림 2와 같이 주어진 사물의 조합이나 이전의 시각적 관계를 직관적으로 느낀 후에는 예측 공간이 크게 줄어들 수 있습니다.

그림 2: 시각적 관계의 공간적 동시 발생 확률[3]과 시간적 전이 확률
구체적으로 i번째 유형 객체와 j번째 유형 객체의 조합에 대해, 그리고 이전 순간 x번째 유형의 관계에 대해 먼저 통계를 통해 해당 공간 동시 발생 확률 행렬 E^{i,j}와 시간 전이 확률 행렬 Ex^{i,j}를 구합니다.
그런 다음 이를 완전 연결 계층에 입력하여 해당 특징 표현을 얻고, 해당 목적 함수를 사용하여 모델이 학습한 지식 표현에 해당 사전 시공간 지식이 포함되어 있는지 확인합니다.

그림 3: 공간(a) 및 시간(b) 지식 표현을 학습하는 과정
Knowledge Embedding Attention Layer
공간 지식은 일반적으로 개체 정보 간의 위치, 거리 및 관계에 대한 정보를 포함합니다. . 반면에 시간적 지식은 행동 사이의 순서, 기간, 간격을 포함합니다.
고유한 특성을 고려하여 개별적으로 처리하면 전문적인 모델링을 통해 고유한 패턴을 보다 정확하게 포착할 수 있습니다.
따라서 연구자들은 시각적 표현과 시공간 지식 간의 상호 작용을 철저하게 탐색하기 위해 시공간 지식 임베딩 레이어를 설계했습니다.
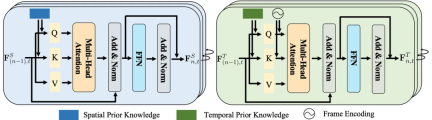
그림 4: 공간(왼쪽) 및 시간(오른쪽) 지식 임베딩 레이어
공간-시간 집계 모듈
앞서 언급한 것처럼 공간 지식 임베딩 레이어는 각 이미지 내의 공간적 일관성을 탐색합니다. 시간 지식 임베딩 레이어는 서로 다른 이미지 간의 시간 전달 상관 관계를 탐색하여 시각적 표현과 시공간 지식 간의 상호 작용을 완전히 탐색합니다.
그럼에도 불구하고 이 두 레이어는 가장 동적으로 변화하는 시각적 관계를 식별하는 데 도움이 되는 장기적인 상황 정보를 무시합니다.
이를 위해 연구원들은 각 객체 쌍의 이러한 표현을 집계하여 최종 의미 라벨과 그 관계를 예측하는 시공간 집계(STA) 모듈을 추가로 설계했습니다. 이는 서로 다른 프레임에 있는 동일한 주체-객체 쌍의 입력 공간적 및 시간적 내장 관계 표현으로 사용됩니다.
특히 연구원들은 동일한 개체 쌍의 이러한 표현을 연결하여 상황별 표현을 생성합니다.
그런 다음 서로 다른 프레임에서 동일한 주체-객체 쌍을 찾기 위해 예측 객체 레이블과 IoU(즉, Intersection over Union)를 채택하여 프레임에서 감지된 동일한 주체-객체 쌍을 일치시킵니다.
마지막으로 프레임 내 관계가 배치별로 서로 다른 표현을 갖는다는 점을 고려하여 슬라이딩 윈도우에서 가장 빠른 표현을 선택합니다.
실험 결과
제안한 프레임워크의 성능을 종합적으로 평가하기 위해 연구진은 기존의 영상 장면 그래프 생성 방식(STTran, TPI, APT)과의 비교 외에 고급 이미지 장면 그래프 생성 방식도 선택했습니다. (KERN, VCTREE, ReIDN, GPS-Net)을 비교합니다.
그 중 공정한 비교를 보장하기 위해 이미지 장면 그래프 생성 방법은 이미지의 각 프레임을 식별하여 특정 비디오에 해당하는 장면 그래프를 생성하는 목표를 달성합니다.
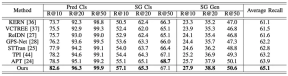
그림 5: Action Genome 데이터 세트에 대한 평가 지표로 Recall을 사용한 실험 결과

그림 6: Action Genome 데이터 세트에 대한 평가 지표로 Mean Recall을 사용한 실험 결과
위 내용은 Sun Yat-sen University의 새로운 시공간 지식 임베딩 프레임워크는 TIP '24에 게시된 비디오 장면 그래프 생성 작업의 최신 발전을 주도합니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 Gemma Scope : AI의 사고 과정으로 들여다 보는 Google의 현미경Apr 17, 2025 am 11:55 AM
Gemma Scope : AI의 사고 과정으로 들여다 보는 Google의 현미경Apr 17, 2025 am 11:55 AM젬마 범위로 언어 모델의 내부 작업 탐색 AI 언어 모델의 복잡성을 이해하는 것은 중요한 도전입니다. 포괄적 인 툴킷 인 Gemma Scope의 Google 릴리스는 연구원에게 강력한 강력한 방법을 제공합니다.
 비즈니스 인텔리전스 분석가는 누구이며 하나가되는 방법은 무엇입니까?Apr 17, 2025 am 11:44 AM
비즈니스 인텔리전스 분석가는 누구이며 하나가되는 방법은 무엇입니까?Apr 17, 2025 am 11:44 AM비즈니스 성공 잠금 해제 : 비즈니스 인텔리전스 분석가가되는 가이드 원시 데이터를 조직의 성장을 이끌어내는 실행 가능한 통찰력으로 바꾸는 것을 상상해보십시오. 이것은 비즈니스 인텔리전스 (BI) 분석가의 힘 - GU에서 중요한 역할입니다.
 SQL에서 열을 추가하는 방법? - 분석 VidhyaApr 17, 2025 am 11:43 AM
SQL에서 열을 추가하는 방법? - 분석 VidhyaApr 17, 2025 am 11:43 AMSQL의 Alter Table 문 : 데이터베이스에 열을 동적으로 추가 데이터 관리에서 SQL의 적응성이 중요합니다. 데이터베이스 구조를 즉시 조정해야합니까? Alter Table 문은 솔루션입니다. 이 안내서는 Colu를 추가합니다
 비즈니스 분석가 대 데이터 분석가Apr 17, 2025 am 11:38 AM
비즈니스 분석가 대 데이터 분석가Apr 17, 2025 am 11:38 AM소개 두 전문가가 중요한 프로젝트에 대해 협력하는 번화 한 사무실을 상상해보십시오. 비즈니스 분석가는 회사의 목표, 개선 영역을 식별하며 시장 동향과의 전략적 조정을 보장합니다. 시무
 Excel의 Count와 Counta는 무엇입니까? - 분석 VidhyaApr 17, 2025 am 11:34 AM
Excel의 Count와 Counta는 무엇입니까? - 분석 VidhyaApr 17, 2025 am 11:34 AMExcel 데이터 계산 및 분석 : 카운트 및 카운트 기능에 대한 자세한 설명 정확한 데이터 계산 및 분석은 특히 큰 데이터 세트로 작업 할 때 Excel에서 중요합니다. Excel은이를 달성하기위한 다양한 기능을 제공하며, 카운트 및 카운타 기능은 다른 조건에서 셀 수를 계산하기위한 핵심 도구입니다. 두 기능 모두 셀을 계산하는 데 사용되지만 설계 목표는 다른 데이터 유형을 대상으로합니다. Count 및 Counta 기능의 특정 세부 사항을 파고 고유 한 기능과 차이점을 강조하고 데이터 분석에 적용하는 방법을 배우겠습니다. 핵심 포인트 개요 수를 이해하고 쿠션하십시오
 Chrome은 AI와 함께 여기에 있습니다 : 매일 새로운 것을 경험하고 있습니다 !!Apr 17, 2025 am 11:29 AM
Chrome은 AI와 함께 여기에 있습니다 : 매일 새로운 것을 경험하고 있습니다 !!Apr 17, 2025 am 11:29 AMChrome 's AI Revolution : 개인화되고 효율적인 탐색 경험 인공 지능 (AI)은 우리의 일상 생활을 빠르게 변화시키고 있으며 Chrome은 웹 브라우징 경기장에서 요금을 주도하고 있습니다. 이 기사는 흥분을 탐구합니다
 AI '의 인간 측면 : 웰빙과 4 배의 결론Apr 17, 2025 am 11:28 AM
AI '의 인간 측면 : 웰빙과 4 배의 결론Apr 17, 2025 am 11:28 AM재구성 영향 : 4 배의 결론 너무 오랫동안 대화는 AI의 영향에 대한 좁은 견해로 인해 주로 이익의 결론에 중점을 두었습니다. 그러나보다 전체적인 접근 방식은 BU의 상호 연결성을 인식합니다.
 5 게임 변화 양자 컴퓨팅 사용 사례에 대해 알아야합니다.Apr 17, 2025 am 11:24 AM
5 게임 변화 양자 컴퓨팅 사용 사례에 대해 알아야합니다.Apr 17, 2025 am 11:24 AM상황이 그 시점을 꾸준히 움직이고 있습니다. 양자 서비스 제공 업체와 신생 기업에 쏟아지는 투자는 업계의 중요성을 이해하고 있음을 보여줍니다. 그리고 점점 더 많은 실제 사용 사례가 그 가치를 보여주기 위해 떠오르고 있습니다.


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

VSCode Windows 64비트 다운로드
Microsoft에서 출시한 강력한 무료 IDE 편집기

맨티스BT
Mantis는 제품 결함 추적을 돕기 위해 설계된 배포하기 쉬운 웹 기반 결함 추적 도구입니다. PHP, MySQL 및 웹 서버가 필요합니다. 데모 및 호스팅 서비스를 확인해 보세요.

ZendStudio 13.5.1 맥
강력한 PHP 통합 개발 환경

Dreamweaver Mac版
시각적 웹 개발 도구

MinGW - Windows용 미니멀리스트 GNU
이 프로젝트는 osdn.net/projects/mingw로 마이그레이션되는 중입니다. 계속해서 그곳에서 우리를 팔로우할 수 있습니다. MinGW: GCC(GNU Compiler Collection)의 기본 Windows 포트로, 기본 Windows 애플리케이션을 구축하기 위한 무료 배포 가능 가져오기 라이브러리 및 헤더 파일로 C99 기능을 지원하는 MSVC 런타임에 대한 확장이 포함되어 있습니다. 모든 MinGW 소프트웨어는 64비트 Windows 플랫폼에서 실행될 수 있습니다.

