



원제: GraphAlign: Enhancing Accurate Feature Alignment by Graph Matching for Multi-Modal 3D ObjectDetection
다시 작성해야 할 내용은 다음과 같습니다. 논문 링크: https://arxiv.org/pdf/2310.08261.pdf
저자 소속: 베이징 교통대학교 허베이 과학기술대학교 칭화대학교

제목 아이디어:
LiDAR와 카메라는 자율 주행에서 3D 타겟 감지를 위한 보완 센서입니다. 그러나 포인트 클라우드와 이미지 간의 부자연스러운 상호 작용을 연구하는 것은 어려운 일이며, 핵심은 이질적인 양식의 특징 정렬을 수행하는 방법에 있습니다. 현재 많은 방법은 투영 보정을 통해서만 형상 정렬을 달성하고 센서 간의 좌표 변환 정확도 오류 문제를 무시하여 최적의 성능을 발휘하지 못합니다. 본 논문에서는 그래프 매칭을 통한 3차원 객체 검출을 위한 보다 정확한 특징 정렬 전략인 GraphAlign을 제안합니다. 구체적으로, 이 논문은 이미지 브랜치의 의미론적 분할 인코더의 이미지 특징을 LiDAR 브랜치의 3D 희소 CNN의 포인트 클라우드 기능과 융합합니다. 계산량을 줄이기 위해 본 논문에서는 유클리드 거리 계산을 사용하여 포인트 클라우드 특징 하위 공간에서 가장 가까운 이웃 관계를 구성합니다. 이미지와 포인트 클라우드 사이의 투영 보정을 통해 포인트 클라우드 특징의 가장 가까운 이웃이 이미지 특징에 투영됩니다. 그런 다음 단일 포인트 클라우드의 가장 가까운 이웃을 여러 이미지와 일치시켜 보다 적합한 특징 정렬을 검색합니다. 또한 이 문서에서는 이기종 양식 간의 기능 정렬을 미세 조정하기 위해 중요한 관계의 가중치를 강화하는 self-attention 모듈도 제공합니다. 본 글에서 제안한 GraphAlign의 유효성과 효율성을 입증하기 위해 nuScenes 벤치마크에서 수많은 실험을 진행했습니다
주요 기여:
이 글은 그래프 매칭(graph match) 기반의 특징 정렬 프레임워크인 GraphAlign을 제안합니다. , 다중 모드 3D 객체 감지의 정렬 불량 문제를 해결합니다.
이 기사에서는 이미지 특징과 포인트 클라우드 특징의 정확한 정렬을 달성하기 위한 GFA(Graph Feature Alignment) 및 SAFA(Self-Attention Feature Alignment) 모듈을 제안합니다. 이를 통해 포인트 클라우드와 이미지 양식 간의 특징 정렬을 더욱 향상시켜 감지 정확도를 향상시킬 수 있습니다. .
KITTI와 nuScenes라는 두 가지 벤치마크를 사용하여 실험을 수행함으로써 GraphAlign이 특히 장거리 표적 탐지에서 포인트 클라우드 탐지의 정확도를 효과적으로 향상시킬 수 있음을 증명했습니다.
네트워크 설계:

그림 1. 기능 정렬 전략 비교
(a) 투영 기반 방법은 모달 기능 간의 관계를 빠르게 설정할 수 있지만 센서 오류로 인해 정렬 오류가 발생할 수 있습니다. (b) 주의 기반 방법은 학습 정렬을 통해 의미 정보를 유지하지만 계산 비용이 많이 듭니다. (c) 본 논문에서 제안하는 GraphAlign은 그래프 기반 특징 정렬을 사용하여 양식 간 보다 합리적인 정렬을 일치시킴으로써 계산 노력을 줄이고 정확도를 향상시킵니다.

그림 2. GraphAlign의 프레임워크.
중국어로 다음과 같이 다시 작성되었습니다. GFA(Graph Feature Alignment) 모듈과 SAFA(Self-Attention Feature Alignment) 모듈로 구성됩니다. GFA 모듈은 이미지와 포인트 클라우드 기능을 입력으로 받고, 투영 교정 행렬을 사용하여 3D 위치를 2D 픽셀 위치로 변환하고, 로컬 이웃 정보를 구축하여 가장 가까운 이웃을 찾고, 이미지와 포인트 클라우드 기능을 결합합니다. SAFA 모듈은 융합된 특징의 중요성을 높이기 위해 self-attention 메커니즘을 통해 K 가장 가까운 이웃 간의 상황별 관계를 모델링하고 최종적으로 가장 대표적인 특징을 선택합니다

그림 3. GFA 처리 흐름
( a) 센서 정확도 정렬 불량을 일으키는 오류입니다. (b) GFA는 포인트 클라우드 기능의 그래프를 통해 근접 관계를 설정합니다. (c) 이 기사에서는 포인트 클라우드 특징을 이미지 특징에 투영하고 이미지 특징의 가장 가까운 K개의 이웃을 얻습니다. (d) 이 논문은 일대다 융합을 수행합니다. 특히 더 나은 정렬을 달성하기 위해 각 개별 포인트 클라우드 특징을 K개의 이웃 이미지 특징과 융합함으로써 일대다 융합을 수행합니다.

그림 4. SAFA 모듈 프로세스
헤드 및 최대 모듈을 단순화했습니다. SAFA 모듈의 목적은 K 이웃 간의 전역 컨텍스트 정보를 개선하여 융합된 기능의 표현을 향상시키는 것입니다


실험 결과:









인용:
Song, Z., Wei , H., Bai, L., Yang, L., & Jia, C. (2023). GraphAlign: 다중 모드 3D 개체 감지를 위한 그래프 일치를 통해 정확한 기능 정렬 향상 ArXiv/2310.08261

원본 링크: https://mp.weixin.qq.com/s/eN6THT2azHvoleT1F6MoSw
위 내용은 다중 모드 3D 개체 감지를 향상하기 위한 정확한 형상 정렬: GraphAlign 적용의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

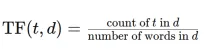 tfidfvectorizer를 사용하여 텍스트 문서를 TF-IDF 행렬로 변환하십시오Apr 18, 2025 am 10:26 AM
tfidfvectorizer를 사용하여 텍스트 문서를 TF-IDF 행렬로 변환하십시오Apr 18, 2025 am 10:26 AM이 기사에서는 텍스트 데이터 분석을위한 자연 언어 처리 (NLP)의 중요한 도구 인 TF-IDF (Trember Inverse Inverse Frequency) 기술이라는 용어를 설명합니다. TF-IDF
 Langchain을 사용하여 스마트 AI 에이전트 구축 : 실용 가이드Apr 18, 2025 am 10:18 AM
Langchain을 사용하여 스마트 AI 에이전트 구축 : 실용 가이드Apr 18, 2025 am 10:18 AMLangchain으로 AI 요원의 힘을 발휘하십시오 : 초보자 가이드 할머니가 chatgpt와 대화를 나누게함으로써 할머니에게 인공 지능의 경이로움을 보여 주 상상해보십시오. th
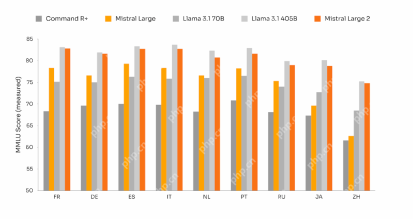 MISTRAL BARGE 2 : 라마 3.1 405B에 도전 할만 큼 강력합니까?Apr 18, 2025 am 10:16 AM
MISTRAL BARGE 2 : 라마 3.1 405B에 도전 할만 큼 강력합니까?Apr 18, 2025 am 10:16 AMMistral Barge 2 : Mistral AI의 강력한 오픈 소스 LLM에 대한 깊은 다이빙 Meta AI의 최근 Llama 3.1 Models Family of Meta Ai의 출시 다음에는 Mistral AI가 현재까지 가장 큰 모델을 공개했습니다. Mistral Barge 2.
 안정적인 확산의 소음 일정은 무엇입니까? - 분석 VidhyaApr 18, 2025 am 10:15 AM
안정적인 확산의 소음 일정은 무엇입니까? - 분석 VidhyaApr 18, 2025 am 10:15 AM확산 모델의 소음 일정 이해 : 포괄적 인 가이드 AI에 의해 생성 된 디지털 아트의 멋진 영상에 사로 잡혀 기본 역학에 대해 궁금해 한 적이 있습니까? 핵심 요소는 "소음 일정, & Quo입니다
 GPT-4O로 대화적인 챗봇을 구축하는 방법? - 분석 VidhyaApr 18, 2025 am 10:06 AM
GPT-4O로 대화적인 챗봇을 구축하는 방법? - 분석 VidhyaApr 18, 2025 am 10:06 AMGPT-4O를 사용하여 상황에 맞는 챗봇 구축 : 포괄적 인 가이드 AI와 NLP의 빠르게 진화하는 환경에서 챗봇은 개발자와 조직에 없어서는 안될 도구가되었습니다. 진정으로 매력적이고 지능적인 채팅을 만드는 주요 측면
 2025 년 AI 에이전트 구축을위한 상위 7 개 프레임 워크Apr 18, 2025 am 10:00 AM
2025 년 AI 에이전트 구축을위한 상위 7 개 프레임 워크Apr 18, 2025 am 10:00 AM이 기사는 AI 에이전트를 구축하기위한 7 가지 주요 프레임 워크 (목표 달성, 결정 및 행동을위한 자율 소프트웨어 엔티티)를 탐구합니다. 전통적인 강화 학습을 능가하는이 요원들은 고급 계획 및 이성을 활용합니다.
 I 형과 II 형 오류의 차이점은 무엇입니까? - 분석 VidhyaApr 18, 2025 am 09:48 AM
I 형과 II 형 오류의 차이점은 무엇입니까? - 분석 VidhyaApr 18, 2025 am 09:48 AM통계 가설 테스트에서 유형 I 및 유형 II 오류 이해 새로운 혈압 약물을 검사하는 임상 시험을 상상해보십시오. 이 시험은 약물이 혈압을 크게 낮추지 만 실제로는 그렇지 않습니다. 이것은 유형입니다
 Sumy Library를 통한 자동 텍스트 요약Apr 18, 2025 am 09:37 AM
Sumy Library를 통한 자동 텍스트 요약Apr 18, 2025 am 09:37 AMSumy : AI 기반 요약 보조원 끝없는 문서를 살펴 보는 데 지쳤습니까? 강력한 파이썬 라이브러리 인 Sumy는 자동 텍스트 요약을위한 간소화 된 솔루션을 제공합니다. 이 기사는 Sumy의 능력을 탐구하여 Throug를 안내합니다


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

MinGW - Windows용 미니멀리스트 GNU
이 프로젝트는 osdn.net/projects/mingw로 마이그레이션되는 중입니다. 계속해서 그곳에서 우리를 팔로우할 수 있습니다. MinGW: GCC(GNU Compiler Collection)의 기본 Windows 포트로, 기본 Windows 애플리케이션을 구축하기 위한 무료 배포 가능 가져오기 라이브러리 및 헤더 파일로 C99 기능을 지원하는 MSVC 런타임에 대한 확장이 포함되어 있습니다. 모든 MinGW 소프트웨어는 64비트 Windows 플랫폼에서 실행될 수 있습니다.

SublimeText3 영어 버전
권장 사항: Win 버전, 코드 프롬프트 지원!

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

Eclipse용 SAP NetWeaver 서버 어댑터
Eclipse를 SAP NetWeaver 애플리케이션 서버와 통합합니다.

PhpStorm 맥 버전
최신(2018.2.1) 전문 PHP 통합 개발 도구

