
합성 Amodal 인식 데이터 세트 AmodalSynthDrive: 자율 주행을 위한 혁신적인 솔루션

- 王林앞으로
- 2023-10-11 12:09:031458검색
- 문서 링크: https://arxiv.org/pdf/2309.06547.pdf
- 데이터 세트 링크: http://amodalsynthdrive.cs.uni-freiburg.de
Abstract
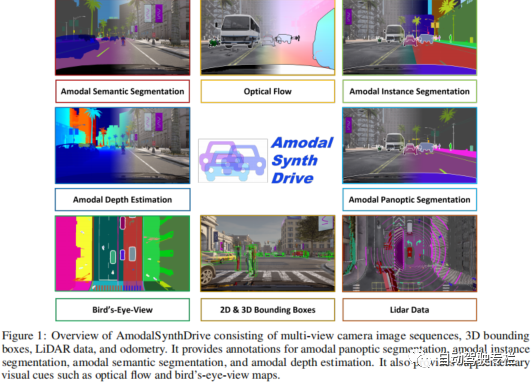
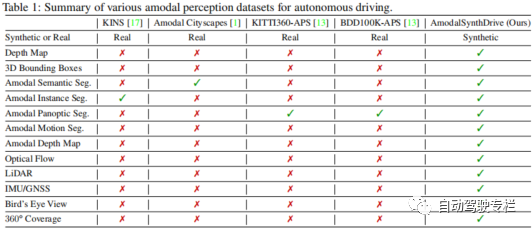
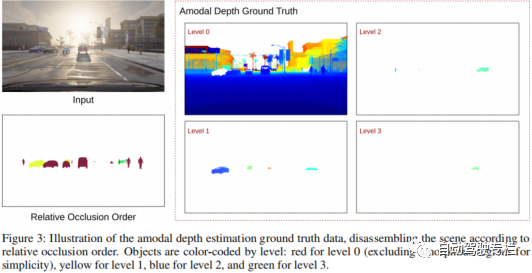
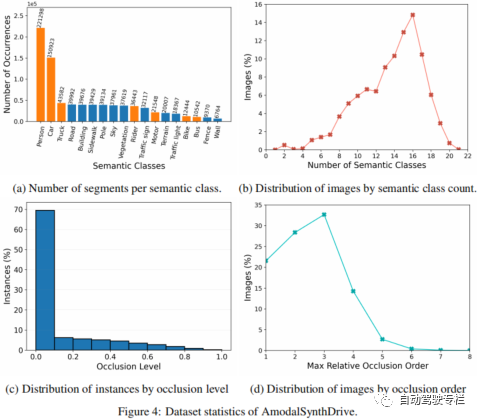
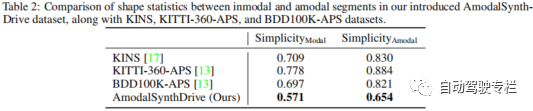
본 논문에서는 자율 주행을 위한 합성 아모달 인식 데이터 세트인 AmodalSynthDrive를 소개합니다. 부분 폐색이 있는 경우에도 물체의 전체를 쉽게 추정할 수 있는 인간과 달리 현대 컴퓨터 비전 알고리즘은 여전히 이 측면을 매우 어렵게 생각합니다. 자율 주행에 대한 이러한 비모달적 인식을 활용하는 것은 적절한 데이터 세트가 부족하기 때문에 아직까지 탐구되지 않은 상태로 남아 있습니다. 이러한 데이터 세트의 생성은 주로 값비싼 주석 비용과 폐쇄된 영역에 정확하게 라벨을 지정하는 주석 작성자의 주관성으로 인해 발생하는 간섭을 완화해야 하는 필요성의 영향을 받습니다. 이러한 제한 사항을 해결하기 위해 이 문서에서는 합성 다중 작업 amodal 인식 데이터 세트인 AmodalSynthDrive를 소개합니다. 데이터 세트는 다양한 교통, 날씨 및 조명 조건에서 100만 개 이상의 객체 주석을 포함하여 150개 주행 시퀀스에 대한 다중 뷰 카메라 이미지, 3D 경계 상자, LiDAR 데이터 및 주행 거리 측정을 제공합니다. AmodalSynthDrive는 공간 이해를 향상시키기 위한 아모달 깊이 추정 도입을 포함하여 다양한 아모달 장면 이해 작업을 지원합니다. 이 문서에서는 과제를 설명하고 공개 벤치마크 서버를 설정하기 위해 각 작업에 대한 여러 기준을 평가합니다.
주요 기여
본 논문의 기여는 다음과 같이 요약됩니다.
1) 본 논문은 여러 데이터 소스를 사용하는 도시 운전 시나리오를 위한 포괄적인 합성 아모달 인식 데이터 세트인 AmodalSynthDrive 데이터 세트를 제안합니다. ;
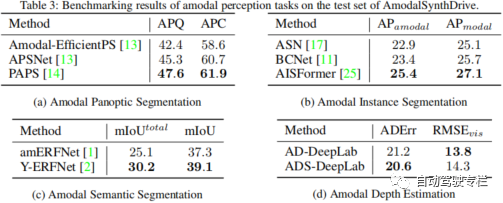
본 논문은 비모달 의미론적 분할, 비모달 인스턴스 분할, 비모달 파노라마 분할을 포함한 비모달 인식 작업에 대한 벤치마크를 제안합니다
3) 새로운 비모달 깊이 추정 작업의 목적은 향상된 공간적 이해. 이 문서에서는 여러 기준을 통해 이 새로운 작업의 타당성을 보여줍니다.
종이 사진과 테이블
요약
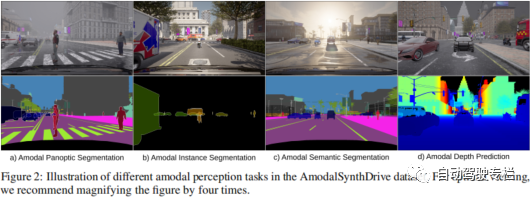
인식은 자율주행차의 핵심 작업이지만, 현재의 방법으로는 복잡한 교통 상황을 해석하는 데 필요한 비모달적 이해가 여전히 부족합니다. 따라서 본 논문에서는 자율주행을 위한 다중 모드 합성 인식 데이터 세트인 AmodalSynthDrive를 제안합니다. 합성 이미지와 LiDAR 포인트 클라우드를 사용하여 기본 아모달 인식 작업에 대한 실제 주석 데이터가 포함된 포괄적인 데이터 세트를 제공하고 아모달 깊이 추정이라는 공간 이해를 향상시키는 새로운 작업을 도입합니다. 이 백서는 60,000개 이상의 개별 이미지 세트를 제공하며, 각 이미지 세트에는 아모달 인스턴스 분할, 아모달 의미론적 분할, 아모달 파노라마 분할, 광학 흐름, 2D 및 3D 경계 상자, 아모달 깊이 및 조감도 관련 데이터가 포함되어 있습니다. 본 논문은 AmodalSynthDrive를 통해 다양한 기준을 제공하며 이 작업이 역동적인 도시 환경에서 아모달 장면 이해에 대한 새로운 유형의 연구를 위한 길을 열 것이라고 믿습니다

원본 링크: https://mp.weixin .qq.com /s/7cXqFbMoljcs6dQOLU3SAQ
위 내용은 합성 Amodal 인식 데이터 세트 AmodalSynthDrive: 자율 주행을 위한 혁신적인 솔루션의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!