



타겟 감지 기술의 다중 타겟 추적 문제
요약:
객체 감지는 이미지나 비디오에서 관심 있는 객체를 식별하고 찾는 것을 목표로 하는 컴퓨터 비전 분야의 인기 있는 연구 방향 중 하나입니다. 그러나 실제 장면에서는 표적이 일반적으로 시간과 공간에 따라 지속적으로 변하기 때문에 표적 탐지만으로는 실질적인 요구를 충족할 수 없습니다. 다중 표적 추적 기술은 이 문제를 해결하는 것을 목표로 합니다. 영상 속 여러 표적의 위치를 추적하고 상태를 지속적으로 업데이트할 수 있습니다.
소개:
컴퓨터 하드웨어와 알고리즘의 지속적인 개발로 표적 탐지 알고리즘은 매우 중요한 결과를 얻었습니다. 초기의 특징 기반 알고리즘부터 현재의 딥러닝 기반 알고리즘까지, 타겟 탐지의 정확성과 속도가 크게 향상되었습니다. 그러나 표적 탐지만으로는 실제 응용 분야의 요구 사항을 충족할 수 없습니다. 많은 시나리오에서 교통 모니터링, 보행자 추적 등 비디오의 여러 대상을 추적해야 합니다. 이 글에서는 표적 탐지 기술의 다중 표적 추적 문제를 소개하고 독자의 이해와 실습을 돕기 위해 구체적인 코드 예제를 제공합니다.
1. 다중 표적 추적의 정의와 문제점
다중 표적 추적이란 연속적인 영상 시퀀스에서 표적 탐지 알고리즘을 통해 각 프레임 내 표적을 식별하고, 시간에 따른 위치와 상태를 추적하는 것을 말합니다. 비디오 시퀀스의 타겟은 종종 크기, 변형, 폐색 등의 변화를 겪고 타겟이 나타나고 사라질 수 있으므로 다중 타겟 추적은 어려운 문제입니다. 여기에는 주로 다음과 같은 과제가 포함됩니다.
- 목표 재식별: 다중 목표 추적에서는 서로 다른 목표 개체를 구별하고 상태를 추적해야 합니다. 추적 중에 표적이 변형되거나 가려질 수 있으므로 표적의 외형 변화로 인한 인식 문제를 해결해야 합니다.
- Occlusion 처리: 실제 장면에서 타겟이 상호 가려지는 것은 매우 일반적인 상황입니다. 표적이 다른 물체에 의해 가려지면 폐색 문제를 해결하고 표적의 지속적인 추적을 보장하기 위해 몇 가지 기술적 수단을 사용해야 합니다.
- 타겟 출현 및 사라짐: 비디오 시퀀스에서 타겟이 갑자기 나타나거나 사라질 수 있습니다. 이를 위해서는 대상의 출현과 소멸을 자동으로 감지하고 그에 따라 처리할 수 있는 추적 알고리즘이 필요합니다.
2. 다중 대상 추적 알고리즘
현재 다중 대상 추적 알고리즘은 크게 두 가지 범주로 나누어집니다. 전통적인 이미지 처리 방법을 기반으로 하는 다중 대상 추적 알고리즘과 딥러닝을 기반으로 하는 다중 대상 추적 알고리즘입니다.
기존 이미지 처리 방법을 기반으로 하는 다중 대상 추적 알고리즘에는 주로 칼만 필터, 입자 필터, 최대 사후 확률(MAP) 추정 등이 포함됩니다. 그 중 칼만 필터(Kalman filter)는 상태를 예측하고 업데이트하여 목표를 추적하는 가장 일반적인 방법 중 하나입니다.
딥 러닝 기반 다중 표적 추적 알고리즘은 표적 탐지를 기반으로 하며 표적을 지속적으로 추적하기 위해 일부 추적 모듈을 추가합니다. 예를 들어, 표적 탐지 모델을 시간 정보와 결합하고 표적 추적 모델을 결합하면 동적 표적 추적을 달성할 수 있습니다.
3. 다중 대상 추적의 코드 예제
이 기사에서는 Python 언어와 OpenCV 라이브러리를 사용하여 Kalman 필터 기반 다중 대상 추적의 코드 예제를 제공합니다. 먼저 필요한 라이브러리를 가져와야 합니다.
import cv2 import numpy as np
다음으로 대상 추적을 구현하기 위한 클래스를 정의해야 합니다.
class MultiObjectTracker:
def __init__(self):
self.kalman_filters = []
self.tracks = []
def update(self, detections):
pass
def draw_tracks(self, frame):
pass update 함수에서 다음의 대상 탐지 결과를 얻습니다. 현재 프레임을 선택한 다음 대상 추적을 위해 Kalman 필터를 사용합니다. 구체적인 코드 구현은 생략되었으며 독자는 자신의 필요에 따라 작성할 수 있습니다. update函数中,我们会得到当前帧的目标检测结果,然后利用卡尔曼滤波器进行目标跟踪。具体的代码实现略去,读者可以根据自己的需求进行编写。
在draw_tracks函数中,我们需要将跟踪结果绘制在图像上:
def draw_tracks(self, frame):
for track in self.tracks:
start_point = (int(track[0]), int(track[1]))
end_point = (int(track[0] + track[2]), int(track[1] + track[3]))
cv2.rectangle(frame, start_point, end_point, (0, 255, 0), 2)最后,我们可以编写一个主函数来调用跟踪器并处理视频序列:
def main():
tracker = MultiObjectTracker()
video = cv2.VideoCapture("input.mp4")
while True:
ret, frame = video.read()
if not ret:
break
# 目标检测,得到当前帧的检测结果
detections = detect_objects(frame)
# 跟踪目标
tracker.update(detections)
# 绘制跟踪结果
tracker.draw_tracks(frame)
# 显示结果
cv2.imshow("Multi-Object Tracking", frame)
if cv2.waitKey(1) == ord('q'):
break
video.release()
cv2.destroyAllWindows()这段代码中,我们首先创建了一个MultiObjectTracker
draw_tracks 함수에서 이미지에 추적 결과를 그려야 합니다. rrreee
마지막으로 추적기를 호출하고 비디오 시퀀스를 처리하는 기본 함수를 작성할 수 있습니다.
MultiObjectTracker 개체를 만들고 처리할 비디오 파일을 로드합니다. 그런 다음 영상의 각 프레임을 지속적으로 읽어 대상 탐지 및 추적을 수행하고 마지막으로 추적 결과를 창에 표시합니다. 키보드의 'q' 키를 눌러 프로그램을 종료할 수 있습니다. 🎜🎜결론: 🎜다중 표적 추적 기술은 표적 탐지를 기반으로 시간과 공간의 변화를 지속적으로 추적하여 비디오 시퀀스에서 여러 표적 추적을 실현합니다. 이 기사에서는 다중 대상 추적의 정의와 알고리즘을 간략하게 소개하고 칼만 필터를 기반으로 한 코드 예제를 제공합니다. 독자는 다중 표적 추적 기술의 연구 및 적용을 더 탐구하기 위해 자신의 필요에 따라 수정하고 확장할 수 있습니다. 🎜위 내용은 표적 탐지 기술의 다중 표적 추적 문제의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

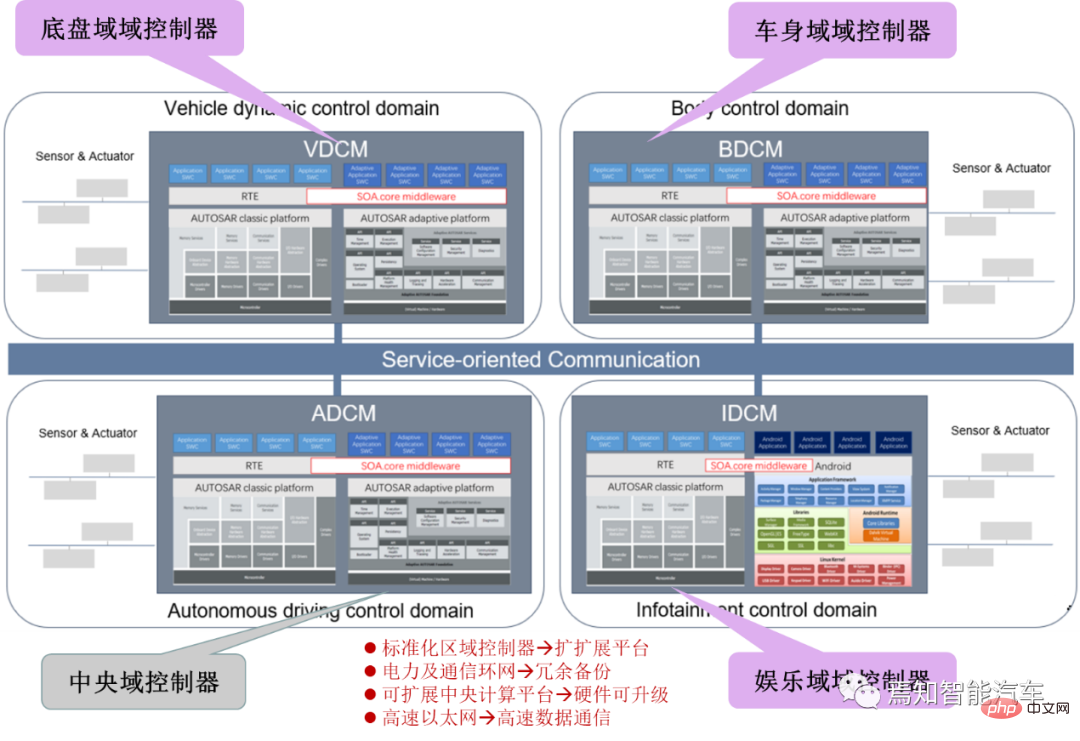 SOA中的软件架构设计及软硬件解耦方法论Apr 08, 2023 pm 11:21 PM
SOA中的软件架构设计及软硬件解耦方法论Apr 08, 2023 pm 11:21 PM对于下一代集中式电子电器架构而言,采用central+zonal 中央计算单元与区域控制器布局已经成为各主机厂或者tier1玩家的必争选项,关于中央计算单元的架构方式,有三种方式:分离SOC、硬件隔离、软件虚拟化。集中式中央计算单元将整合自动驾驶,智能座舱和车辆控制三大域的核心业务功能,标准化的区域控制器主要有三个职责:电力分配、数据服务、区域网关。因此,中央计算单元将会集成一个高吞吐量的以太网交换机。随着整车集成化的程度越来越高,越来越多ECU的功能将会慢慢的被吸收到区域控制器当中。而平台化
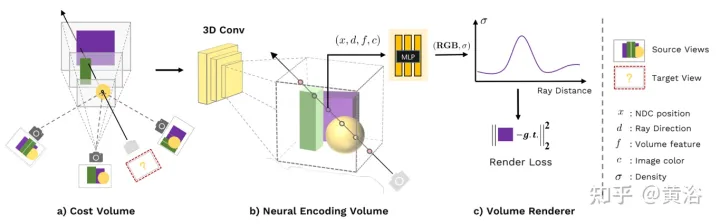 新视角图像生成:讨论基于NeRF的泛化方法Apr 09, 2023 pm 05:31 PM
新视角图像生成:讨论基于NeRF的泛化方法Apr 09, 2023 pm 05:31 PM新视角图像生成(NVS)是计算机视觉的一个应用领域,在1998年SuperBowl的比赛,CMU的RI曾展示过给定多摄像头立体视觉(MVS)的NVS,当时这个技术曾转让给美国一家体育电视台,但最终没有商业化;英国BBC广播公司为此做过研发投入,但是没有真正产品化。在基于图像渲染(IBR)领域,NVS应用有一个分支,即基于深度图像的渲染(DBIR)。另外,在2010年曾很火的3D TV,也是需要从单目视频中得到双目立体,但是由于技术的不成熟,最终没有流行起来。当时基于机器学习的方法已经开始研究,比
 多无人机协同3D打印盖房子,研究登上Nature封面Apr 09, 2023 am 11:51 AM
多无人机协同3D打印盖房子,研究登上Nature封面Apr 09, 2023 am 11:51 AM我们经常可以看到蜜蜂、蚂蚁等各种动物忙碌地筑巢。经过自然选择,它们的工作效率高到叹为观止这些动物的分工合作能力已经「传给」了无人机,来自英国帝国理工学院的一项研究向我们展示了未来的方向,就像这样:无人机 3D 打灰:本周三,这一研究成果登上了《自然》封面。论文地址:https://www.nature.com/articles/s41586-022-04988-4为了展示无人机的能力,研究人员使用泡沫和一种特殊的轻质水泥材料,建造了高度从 0.18 米到 2.05 米不等的结构。与预想的原始蓝图
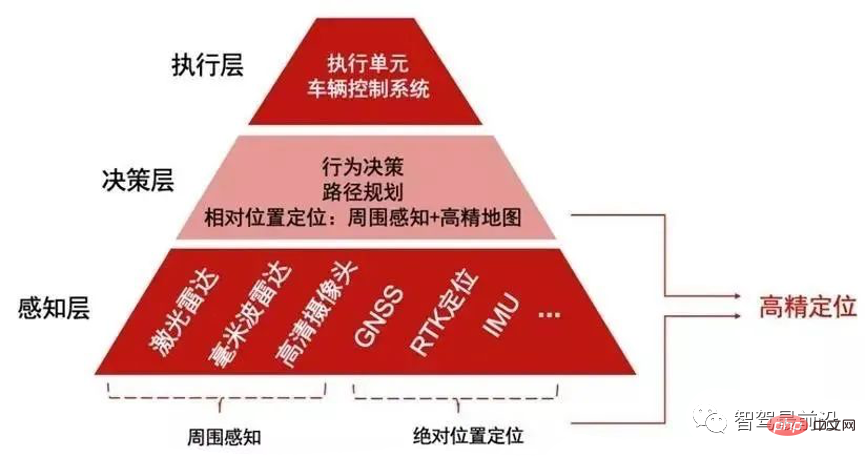 如何让自动驾驶汽车“认得路”Apr 09, 2023 pm 01:41 PM
如何让自动驾驶汽车“认得路”Apr 09, 2023 pm 01:41 PM与人类行走一样,自动驾驶汽车想要完成出行过程也需要有独立思考,可以对交通环境进行判断、决策的能力。随着高级辅助驾驶系统技术的提升,驾驶员驾驶汽车的安全性不断提高,驾驶员参与驾驶决策的程度也逐渐降低,自动驾驶离我们越来越近。自动驾驶汽车又称为无人驾驶车,其本质就是高智能机器人,可以仅需要驾驶员辅助或完全不需要驾驶员操作即可完成出行行为的高智能机器人。自动驾驶主要通过感知层、决策层及执行层来实现,作为自动化载具,自动驾驶汽车可以通过加装的雷达(毫米波雷达、激光雷达)、车载摄像头、全球导航卫星系统(G
 超逼真渲染!虚幻引擎技术大牛解读全局光照系统LumenApr 08, 2023 pm 10:21 PM
超逼真渲染!虚幻引擎技术大牛解读全局光照系统LumenApr 08, 2023 pm 10:21 PM实时全局光照(Real-time GI)一直是计算机图形学的圣杯。多年来,业界也提出多种方法来解决这个问题。常用的方法包通过利用某些假设来约束问题域,比如静态几何,粗糙的场景表示或者追踪粗糙探针,以及在两者之间插值照明。在虚幻引擎中,全局光照和反射系统Lumen这一技术便是由Krzysztof Narkowicz和Daniel Wright一起创立的。目标是构建一个与前人不同的方案,能够实现统一照明,以及类似烘烤一样的照明质量。近期,在SIGGRAPH 2022上,Krzysztof Narko
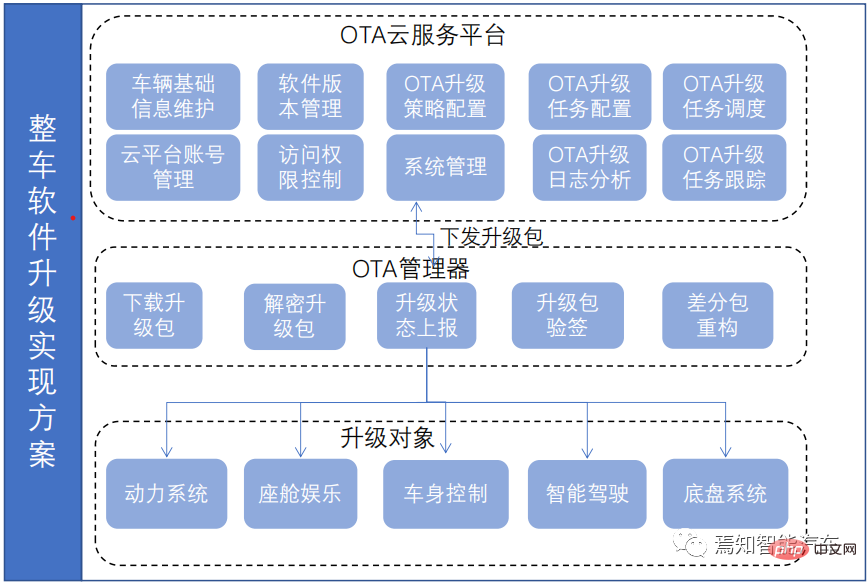 一文聊聊智能驾驶系统与软件升级的关联设计方案Apr 11, 2023 pm 07:49 PM
一文聊聊智能驾驶系统与软件升级的关联设计方案Apr 11, 2023 pm 07:49 PM由于智能汽车集中化趋势,导致在网络连接上已经由传统的低带宽Can网络升级转换到高带宽以太网网络为主的升级过程。为了提升车辆升级能力,基于为车主提供持续且优质的体验和服务,需要在现有系统基础(由原始只对车机上传统的 ECU 进行升级,转换到实现以太网增量升级的过程)之上开发一套可兼容现有 OTA 系统的全新 OTA 服务系统,实现对整车软件、固件、服务的 OTA 升级能力,从而最终提升用户的使用体验和服务体验。软件升级触及的两大领域-FOTA/SOTA整车软件升级是通过OTA技术,是对车载娱乐、导
 internet的基本结构与技术起源于什么Dec 15, 2020 pm 04:48 PM
internet的基本结构与技术起源于什么Dec 15, 2020 pm 04:48 PMinternet的基本结构与技术起源于ARPANET。ARPANET是计算机网络技术发展中的一个里程碑,它的研究成果对促进网络技术的发展起到了重要的作用,并未internet的形成奠定了基础。arpanet(阿帕网)为美国国防部高级研究计划署开发的世界上第一个运营的封包交换网络,它是全球互联网的始祖。
 综述:自动驾驶的协同感知技术Apr 08, 2023 pm 03:01 PM
综述:自动驾驶的协同感知技术Apr 08, 2023 pm 03:01 PMarXiv综述论文“Collaborative Perception for Autonomous Driving: Current Status and Future Trend“,2022年8月23日,上海交大。感知是自主驾驶系统的关键模块之一,然而单车的有限能力造成感知性能提高的瓶颈。为了突破单个感知的限制,提出协同感知,使车辆能够共享信息,感知视线之外和视野以外的环境。本文回顾了很有前途的协同感知技术相关工作,包括基本概念、协同模式以及关键要素和应用。最后,讨论该研究领域的开放挑战和问题


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

DVWA
DVWA(Damn Vulnerable Web App)는 매우 취약한 PHP/MySQL 웹 애플리케이션입니다. 주요 목표는 보안 전문가가 법적 환경에서 자신의 기술과 도구를 테스트하고, 웹 개발자가 웹 응용 프로그램 보안 프로세스를 더 잘 이해할 수 있도록 돕고, 교사/학생이 교실 환경 웹 응용 프로그램에서 가르치고 배울 수 있도록 돕는 것입니다. 보안. DVWA의 목표는 다양한 난이도의 간단하고 간단한 인터페이스를 통해 가장 일반적인 웹 취약점 중 일부를 연습하는 것입니다. 이 소프트웨어는

PhpStorm 맥 버전
최신(2018.2.1) 전문 PHP 통합 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)

MinGW - Windows용 미니멀리스트 GNU
이 프로젝트는 osdn.net/projects/mingw로 마이그레이션되는 중입니다. 계속해서 그곳에서 우리를 팔로우할 수 있습니다. MinGW: GCC(GNU Compiler Collection)의 기본 Windows 포트로, 기본 Windows 애플리케이션을 구축하기 위한 무료 배포 가능 가져오기 라이브러리 및 헤더 파일로 C99 기능을 지원하는 MSVC 런타임에 대한 확장이 포함되어 있습니다. 모든 MinGW 소프트웨어는 64비트 Windows 플랫폼에서 실행될 수 있습니다.

ZendStudio 13.5.1 맥
강력한 PHP 통합 개발 환경

