



논문 제목: "향상된 모델 예측 제어를 기반으로 한 불확실한 환경에서 자율주행 자동차의 궤적 계획 방법"
발간 저널: IEEE Transactions on Intelligent Transportation Systems
발행일: 2023년 4월
다음은 저입니다. 나만의 논문 독서 노트 본 글은 전문 번역이 아닌 주로 제가 핵심이라고 생각하는 부분입니다. 본 글은 이전 글에 이어 본 논문의 실험적 검증 부분을 정리한 것입니다. 이전 글은 다음과 같습니다. 다음은 제가 직접 작성한 논문 독해 노트로, 전문 번역이 아닌 제가 핵심이라고 생각하는 부분을 위주로 정리한 글입니다. 이전 기사는 다음과 같습니다.
fhwim: 불확실한 환경에서 자율주행차를 위한 향상된 모델 예측 제어를 기반으로 한 궤도 계획 방법
https://zhuanlan.zhihu.com/p/658708080
1 시뮬레이션 검증
(1) 시뮬레이션 환경
공동 시뮬레이션 도구에는 Prescan, PyCharm, Matlab/Simulink가 포함되며, 그 중 Prescan을 사용하여 시뮬레이션된 교통 장면을 구축하고 PyCharm(쉽게 신경망 또는 pytorch 사용)을 사용하여 융합 예측 모듈을 작성합니다. , Matlab/Simulink(MPC 툴박스 포함)는 궤적 계획 모듈을 구축하고 차량 제어를 실현하는 데 사용됩니다. 전반적인 도구 선택 아이디어는 비교적 자연스럽고 합리적입니다. 이 부분을 제어하는데 사용되는 수평 제어는 LQR, 수직 제어는 PID를 사용하는데 이 역시 비교적 일반적인 제어 방식이다. 융합 예측 모듈의 LSTM 인코더-디코더는 오픈 소스 코드를 사용합니다. 저자는 참고 문헌 [31] Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances에서 따왔다고 밝혔는데, 이 글이 2011년에 출판된 것으로 봤습니다. 조금 오래되었습니다(2011년의 LSTM 인코더-디코드는 어디에 있었습니까?). 작성자가 이를 기반으로 코드를 변경했는지는 알 수 없습니다.
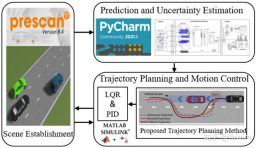
그림 1 시뮬레이션 환경 설정
(2) MRPI 세트 얻기
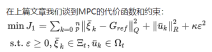


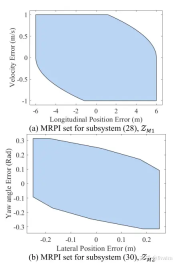
그림 2 MRPI 세트 서브시스템
(3) 사례 1: 정적 회피 장애물 장면
정적 장애물 회피 장면은 정지해 있는 장애물 차량을 의미합니다. 궤적 계획 결과는 다음과 같습니다.

그림 3의 일반 MPC 방법과 파이프라인 기반 MPC 방법을 비교
여기서 그는 전설이 있다고 의심합니다. 질문, 이전 기사에 따르면 원하는 궤적과 조정 궤적을 추가하여 최종 참조 궤적을 얻는 동시에 결과를 분석할 때 튜브 기반 MPC가 영역에 있다고 말했습니다. 그림 3(b)의 조정 궤적은 오류를 줄이므로 그림 3(b)의 원하는 궤적과 참조 궤적의 두 범례가 일치해야 합니다. )을 교환해야 합니다. 즉, 녹색 선이 최종 기준 궤적입니다. 파란색 선은 원하는 중간 결과 궤적입니다. 아래의 속도 곡선과 수평 및 수직 오차 곡선을 포함하면 저자가 의미하는 바를 이해할 수 있을 것입니다. 튜브 기반 MPC의 녹색 곡선은 최종 결과이고 파란색 곡선은 조정 궤적을 적용하지 않은 결과입니다.
그림 4는 일반 MPC 방법과 파이프라인 기반 MPC 방법의 속도 변화 비교를 보여줍니다.
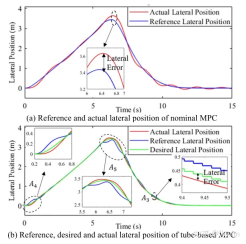
그림 5 가로 위치 비교
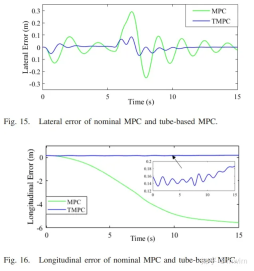
다시 작성해야 할 내용은 다음과 같습니다. 수평 및 수직 오류 그림 6
저자는 스티어링 휠 각도 변화의 부드러움도 비교했는데, 여기서는 자세히 설명하지 않겠습니다. 동시에 저자는 궤적 조정의 좋은 효과에 대한 이론적 근거를 제시했습니다. 이를 추가한 후 궤적 오류는 항상 MRPI 세트 내에 있습니다. 즉, 튜브 기반 모델 예측 제어의 추적 편차입니다. (튜브 기반 MPC)는 항상 MRPI 세트 내에 있습니다. 일반 모델 예측 제어(MPC)는 불확실한 환경에서 경계가 없으며 이는 매우 클 수 있습니다.
(4) 사례 2: 동적 장애물 회피 장면
과 비교 이전 장면에서는 이제 장애물 차량이 움직이기 시작합니다. 전반적인 궤적, 속도 변화, 수평 및 수직 오류, 스티어링 휠 변화의 부드러움에 대해서는 자세히 설명하지 않습니다. 여기서는 전체 궤적만 보여줍니다
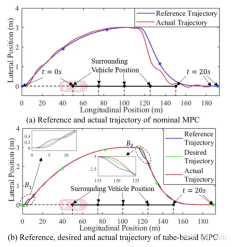
그림 7 일반 MPC 방식과 튜브 기반 MPC 방식의 전체 궤적 비교
(5) 사례 3: 실제 주행 장면
여기서는 저자는 NGSIM 데이터세트를 사용하여 방법을 검증하기로 선택했습니다. 첫째, 저자는 융합 예측 방법을 검증했습니다. NGSIM 데이터 세트에는 차량 궤적 데이터가 포함되어 있으며, 저자는 이를 과거 궤적과 미래 궤적으로 나누고 LSTM 인코더-디코더가 학습할 수 있는 훈련 세트를 구성했습니다. 저자는 10,000개의 궤적을 선택했으며 그 중 7,500개는 훈련 세트로 사용되었고 2,500개는 검증 세트로 사용되었습니다. 최적화 프로그램은 Adam을 가져와 학습률을 0.01로 설정합니다. 예측 효과는 아래 그림과 같습니다
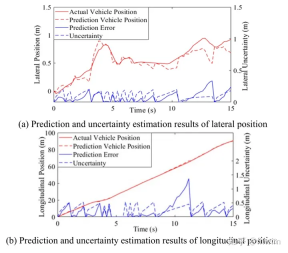
그림 8 수평 및 수직 궤도 예측 결과와 불확실성
이 글에서 저자는 ADE와 같이 궤도 예측 분야에서 일반적으로 사용되는 지표를 사용하지 않았습니다. FDE 등 이 접근 방식은 설득력이 없다고 생각하지만, 이 글의 초점은 튜브 기반 MPC 기반의 궤적 계획이라는 것도 이해할 수 있습니다
궤적 예측을 확인한 후, 궤적 예측 모듈의 역할을 더욱 검증하기 위해 궤적 계획을 수행했습니다. . 비교는 다음과 같습니다. 세 가지 상황이 있습니다.
(a) 장애물 자동차의 실제 미래 궤적을 이미 알고 있는 경우 이것이 통제 그룹 역할을 합니다.
미래를 모르는 경우. 장애물 자동차의 궤적을 먼저 합니다. 궤적 예측(불확도 계산은 아님)을 한 다음 궤적 계획을 세웁니다
(c) 장애물 자동차의 미래 궤적을 알 수 없을 때 먼저 궤적 예측(불확도 계산)을 수행합니다.
그림 9는 각각 True Position, Prediction Results, Proposed Method에 해당하는 (a), (b), (c)의 결과를 보여줍니다.Proposed Method는 의 방법으로 얻은 결과입니다. 이 기사에서는 제안된 방법이 True Position에 더 가깝다는 것을 알 수 있으며 이러한 융합 예측 방법(특히 불확실성 계산)이 효과적임을 보여줍니다.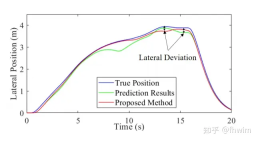
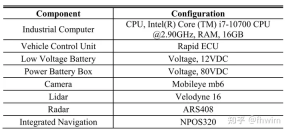
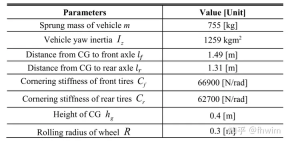
2. 실제 차량 실험 검증
실험에 사용된 차량은 아래 그림과 같습니다.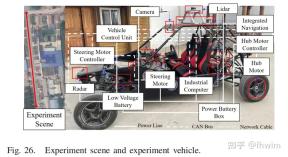
안전을 위해 저자가 설정한 실험 장면은 시뮬레이션 실험 사례 1과 동일합니다. 정적 장애물 회피 장면이므로 전체 궤적, 속도 변화, 수평 및 수직 오차를 비교하는 것이 좋습니다. 그리고 스티어링 휠의 부드러움이 변하는데, 이에 대해서는 자세히 설명하지 않겠습니다.
3. 읽기 요약
우선, 논문의 아이디어는 불확실성 계산을 이용한 궤적 예측 모듈과 튜브 기반 MPC 기반의 궤적 계획 모듈에 관한 것입니다. 그 중 궤적계획 모듈이 주요 내용이다. 나는 이 모듈식 형식이 실제로 궤도 계획에 궤도 예측을 적용하기 때문에 매우 만족합니다. 예측의 출력은 계획의 입력으로 사용되며 계획 모듈은 예측 모듈의 안전 임계값만 결정하므로 두 모듈 간의 결합이 약합니다. 즉, 예측모듈은 장애물 차량의 궤적과 불확실성을 예측한 결과를 제공할 수 있는 한 다른 방법으로 대체될 수 있다. 미래에는 궤적과 불확실성을 직접 예측하기 위해 보다 발전된 신경망이 고려될 수 있습니다. 전체적으로 이번 융합 예측 알고리즘의 과정은 다소 복잡하지만, 논문의 아이디어는 매우 좋다고 생각합니다. 시뮬레이션과 실제 차량 테스트에 대한 아이디어와 작업량도 만족스럽습니다
둘째, 기사를 읽으면서 발견된 낮은 수준의 오류가 있습니다. 예를 들어 LSTM 인코더-디코더 부분에서 LSTM 출력은 미래 단계의 궤적 지점으로 수식에도 쓰여 있지만 텍스트에서는 로 쓰여 있습니다.

Figure 13 LSTM 인코더-디코더 부분의 일부 오류
그리고 시뮬레이션 실험 부분에서 MRPI Set을 계산할 때 시스템 (21), 즉 오류 시스템을 하위 시스템으로 나눈다고 합니다. (32)와 (34), 그러나 실제로 하위 시스템 (30)과 (32)에서는 이러한 작은 오류가 전체 방법에는 영향을 미치지 않지만 독자의 독서 경험에도 영향을 미칩니다.

그림 14 시뮬레이션 실험부 MRPI 원본 텍스트 설정
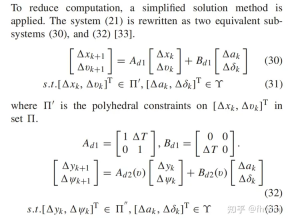
그림 15의 오류 시스템은 하위 시스템 (30)과 (32)로 구분됩니다

원문 링크: https://mp .weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
위 내용은 불확실한 환경에서 자율주행을 위한 궤도 계획 방법 개선의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 최고의 프롬프트 엔지니어링 기술의 최신 연간 편집Apr 10, 2025 am 11:22 AM
최고의 프롬프트 엔지니어링 기술의 최신 연간 편집Apr 10, 2025 am 11:22 AM내 칼럼을 처음 접할 수있는 분들을 위해, 나는 구체화 된 AI, AI 추론, AI의 첨단 획기적인 혁신, AI 교육, AI의 수비, ai re
 유럽의 AI 대륙 행동 계획 : 기가 팩토리, 데이터 실험실 및 녹색 AIApr 10, 2025 am 11:21 AM
유럽의 AI 대륙 행동 계획 : 기가 팩토리, 데이터 실험실 및 녹색 AIApr 10, 2025 am 11:21 AM유럽의 야심 찬 AI 대륙 행동 계획은 EU를 인공 지능의 글로벌 리더로 설립하는 것을 목표로합니다. 핵심 요소는 AI Gigafactories 네트워크를 만드는 것입니다. 각각 약 100,000 개의 고급 AI 칩을 보유하고 있습니다 - Capaci의 4 배
 Microsoft의 간단한 에이전트 스토리가 더 많은 팬을 만들기에 충분합니까?Apr 10, 2025 am 11:20 AM
Microsoft의 간단한 에이전트 스토리가 더 많은 팬을 만들기에 충분합니까?Apr 10, 2025 am 11:20 AMAI 에이전트 애플리케이션에 대한 Microsoft의 통합 접근 방식 : 비즈니스를위한 명확한 승리 새로운 AI 에이전트 기능에 관한 Microsoft의 최근 발표는 명확하고 통합 된 프레젠테이션에 깊은 인상을 받았습니다. 많은 기술 발표와는 달리 TE에서 멍청한 것입니다
 직원에게 AI 전략 판매 : Shopify CEO의 선언문Apr 10, 2025 am 11:19 AM
직원에게 AI 전략 판매 : Shopify CEO의 선언문Apr 10, 2025 am 11:19 AMShopify CEO Tobi Lütke의 최근 메모는 AI 숙련도가 모든 직원에 대한 근본적인 기대를 대담하게 선언하여 회사 내에서 중요한 문화적 변화를 표시합니다. 이것은 도망가는 트렌드가 아닙니다. 그것은 p에 통합 된 새로운 운영 패러다임입니다
 IBM은 전체 AI 통합으로 Z17 메인 프레임을 출시합니다Apr 10, 2025 am 11:18 AM
IBM은 전체 AI 통합으로 Z17 메인 프레임을 출시합니다Apr 10, 2025 am 11:18 AMIBM의 Z17 메인 프레임 : 향상된 비즈니스 운영을 위해 AI를 통합합니다 지난 달, IBM의 뉴욕 본사에서 Z17의 기능을 미리 보았습니다. Z16의 성공을 기반으로 (2022 년에 시작되어 지속적인 수익을 보여주는 시연
 5 Chatgpt가 다른 사람에 따라 멈추고 자신을 완전히 믿으라고 프롬프트Apr 10, 2025 am 11:17 AM
5 Chatgpt가 다른 사람에 따라 멈추고 자신을 완전히 믿으라고 프롬프트Apr 10, 2025 am 11:17 AM흔들리지 않는 자신감을 해제하고 외부 검증의 필요성을 제거하십시오! 이 다섯 개의 chatgpt 프롬프트는 완전한 자립과 자기 인식의 변형적인 변화로 당신을 안내 할 것입니다. 간단히 괄호를 복사, 붙여 넣기 및 사용자 정의하십시오
 AI는 당신의 마음과 위험합니다Apr 10, 2025 am 11:16 AM
AI는 당신의 마음과 위험합니다Apr 10, 2025 am 11:16 AM인공 지능 보안 및 연구 회사 인 Anthropic의 최근 [연구]는 이러한 복잡한 과정에 대한 진실을 밝히기 시작하여 우리 자신의인지 영역과 방해가되는 복잡성을 보여줍니다. 자연 지능과 인공 지능은 우리가 생각하는 것보다 더 유사 할 수 있습니다. 내부 스누핑 : 의인성 해석 가능성 연구 Anthropic이 수행 한 연구에서 얻은 새로운 연구 결과는 AI의 내부 컴퓨팅을 역 엔지니어링하는 것을 목표로하는 기계적 해석 성 분야에서 상당한 발전을 나타냅니다. AI가하는 일을 관찰 할뿐만 아니라 인공 뉴런 수준에서 어떻게 수행하는지 이해합니다. 누군가가 특정한 대상을 보거나 특정한 아이디어에 대해 생각할 때 어떤 뉴런이 발사하는지 그림으로 뇌를 이해하려고한다고 상상해보십시오. 에이
 Dragonwing은 Qualcomm의 가장자리 모멘텀을 보여줍니다Apr 10, 2025 am 11:14 AM
Dragonwing은 Qualcomm의 가장자리 모멘텀을 보여줍니다Apr 10, 2025 am 11:14 AMQualcomm 's Dragonwing : 기업 및 인프라로의 전략적 도약 Qualcomm은 새로운 Dragonwing 브랜드를 통해 전 세계적으로 엔터프라이즈 및 인프라 시장을 대상으로 모바일을 넘어 범위를 적극적으로 확장하고 있습니다. 이것은 단지 Rebran이 아닙니다


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

드림위버 CS6
시각적 웹 개발 도구

ZendStudio 13.5.1 맥
강력한 PHP 통합 개발 환경

VSCode Windows 64비트 다운로드
Microsoft에서 출시한 강력한 무료 IDE 편집기

mPDF
mPDF는 UTF-8로 인코딩된 HTML에서 PDF 파일을 생성할 수 있는 PHP 라이브러리입니다. 원저자인 Ian Back은 자신의 웹 사이트에서 "즉시" PDF 파일을 출력하고 다양한 언어를 처리하기 위해 mPDF를 작성했습니다. HTML2FPDF와 같은 원본 스크립트보다 유니코드 글꼴을 사용할 때 속도가 느리고 더 큰 파일을 생성하지만 CSS 스타일 등을 지원하고 많은 개선 사항이 있습니다. RTL(아랍어, 히브리어), CJK(중국어, 일본어, 한국어)를 포함한 거의 모든 언어를 지원합니다. 중첩된 블록 수준 요소(예: P, DIV)를 지원합니다.

스튜디오 13.0.1 보내기
강력한 PHP 통합 개발 환경
뜨거운 주제
 1374
1374 524019
524019