


직렬 통신 프로그래밍을 지원하도록 Linux 시스템을 구성하세요
직렬 통신은 컴퓨터와 외부 장치 간의 데이터 전송에 사용되는 일반적인 하드웨어 통신 방법입니다. Linux 시스템에서는 구성을 통해 직렬 포트에 대한 지원을 구현한 다음 직렬 통신 프로그래밍을 수행할 수 있습니다. 이 기사에서는 Linux 시스템에서 직렬 포트를 구성하는 방법을 소개하고 관련 코드 예제를 제공합니다.
1. 직렬 포트 장치를 확인하세요
리눅스 시스템에서는 직렬 포트 장치를 TTY 장치라고 합니다. 터미널 명령 ls /dev/ttyS*를 사용하여 시스템에 존재하는 직렬 장치를 볼 수 있습니다. 일반적으로 시스템에 직렬 포트 장치가 있는 경우 /dev/ttyS0 또는 /dev/ttyS1과 유사한 출력이 표시됩니다. 그중 /dev/ttyS0는 첫 번째 직렬 포트 장치를 나타내고, /dev/ttyS1은 두 번째 직렬 포트 장치를 나타내는 식입니다. ls /dev/ttyS*来查看系统中存在的串口设备。通常,如果系统存在串口设备,会显示类似 /dev/ttyS0 或 /dev/ttyS1 的输出。其中,/dev/ttyS0 代表第一个串口设备,/dev/ttyS1 代表第二个串口设备,以此类推。
二、配置串口参数
在进行串口通信编程之前,我们需要配置串口的参数,包括波特率、数据位、校验位、停止位等。可以通过终端命令stty来进行串口参数的配置。以下是一个示例命令:
stty -F /dev/ttyS0 9600 cs8 -cstopb -parenb
上述命令中,“-F /dev/ttyS0”指定了要配置的串口设备为/dev/ttyS0,9600是指定的波特率,cs8表示数据位为8位,-cstopb表示停止位为1位,-parenb表示不进行奇偶校验。根据需要,可以根据实际情况调整这些参数。
三、打开串口设备
在进行串口通信编程之前,需要通过打开串口设备来进行操作。可以使用open()函数来打开串口设备。以下是一个简单的代码示例:
#include<unistd.h>
#include<fcntl.h>
#include<errno.h>
int fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY | O_NONBLOCK);
if (fd == -1) {
perror("打开串口设备失败");
return -1;
}上述代码中,open()函数通过传入串口设备路径/dev/ttyS0以及一些标志来打开串口设备。O_RDWR表示以可读写的方式打开设备,O_NOCTTY表示不将打开的串口作为控制终端,O_NONBLOCK表示以非阻塞的方式打开设备。打开成功后,会返回一个文件描述符fd供后续使用。
四、设置串口参数
在打开串口设备后,我们需要使用tcgetattr()函数获取串口的原始参数,然后通过修改这些参数来进行串口参数的配置。以下是一个简单的代码示例:
#include<termios.h> struct termios options; tcgetattr(fd, &options); cfsetispeed(&options, B9600); // 设置输入波特率为9600 cfsetospeed(&options, B9600); // 设置输出波特率为9600 options.c_cflag |= CS8 | CLOCAL | CREAD; // 设置数据位为8位,并开启本地连接和接收使能 options.c_cflag &= ~PARENB; // 关闭奇偶校验 options.c_cflag &= ~CSTOPB; // 设置停止位为1位 tcsetattr(fd, TCSANOW, &options);
上述代码中,tcgetattr()函数用于获取串口的原始参数,并将其存储在struct termios结构体变量options中。接着,通过cfsetispeed()和cfsetospeed()函数设置输入和输出波特率为9600,再通过位操作设置数据位、奇偶校验和停止位等参数。最后,使用tcsetattr()函数将修改后的参数写回串口中。
五、串口通信
在配置完串口参数后,我们可以使用read()函数从串口中读取数据,使用write()函数向串口中写入数据。以下是一个简单的接收串口数据的代码示例:
char buffer[255];
int bytes_read = read(fd, buffer, sizeof(buffer));
if (bytes_read == -1) {
perror("读取串口数据失败");
return -1;
}
printf("接收到的数据:%s
", buffer);上述代码中,我们先定义了一个缓冲区buffer用于存储接收到的数据。然后,使用read()函数从串口中读取数据,并将读取到的数据存储在缓冲区中。接着,使用printf()函数打印出接收到的数据。
六、关闭串口设备
在程序结束后,我们需要关闭打开的串口设备。可以使用close()
stty를 통해 구성할 수 있습니다. 다음은 예제 명령입니다. close(fd);위 명령에서 "-F /dev/ttyS0"은 구성할 직렬 장치가
/dev/ttyS0이고 9600는 지정된 전송 속도, <code>cs8는 데이터 비트가 8비트임을 의미하고, -cstopb는 정지 비트가 1비트임을 의미하고, -parenb 패리티 검사가 수행되지 않았음을 의미합니다. 필요한 경우 실제 상황에 따라 이러한 매개변수를 조정할 수 있습니다. 🎜🎜3. 직렬 포트 장치 열기🎜🎜직렬 통신 프로그래밍을 하기 전에 직렬 포트 장치를 열어야 합니다. open() 함수를 사용하여 직렬 장치를 열 수 있습니다. 다음은 간단한 코드 예입니다. 🎜rrreee🎜위 코드에서 open() 함수는 직렬 장치 경로 /dev/ttyS0를 전달하여 직렬 장치를 엽니다. 그리고 일부 플래그. O_RDWR은 읽기-쓰기 모드에서 장치를 여는 것을 의미하고, O_NOCTTY는 열린 직렬 포트를 제어 터미널로 사용하지 않음을 의미하며, O_NONBLOCK은 여는 것을 의미합니다. 비차단 방식으로 장치를 켜세요. 성공적으로 열리면 후속 사용을 위해 파일 설명자 fd가 반환됩니다. 🎜🎜4. 직렬 포트 매개변수 설정🎜🎜직렬 포트 장치를 연 후 tcgetattr() 함수를 사용하여 직렬 포트의 원래 매개변수를 얻은 다음 직렬 포트 매개변수를 구성해야 합니다. 이러한 매개변수를 수정하여 다음은 간단한 코드 예입니다. 🎜rrreee🎜위 코드에서 tcgetattr() 함수는 직렬 포트의 원래 매개변수를 가져와 struct termiosoptions의 /code> 구조입니다. 그런 다음 cfsetispeed() 및 cfsetospeed() 함수를 통해 입출력 전송 속도를 9600으로 설정한 다음 비트 연산을 통해 데이터 비트, 패리티 및 정지 비트를 설정합니다. . 마지막으로 tcsetattr() 함수를 사용하여 수정된 매개변수를 직렬 포트에 다시 씁니다. 🎜🎜5. 직렬 포트 통신🎜🎜직렬 포트 매개변수를 구성한 후 read() 함수를 사용하여 직렬 포트에서 데이터를 읽고 write()를 사용할 수 있습니다. > 직렬 포트에 데이터를 쓰는 함수입니다. 다음은 직렬 포트 데이터를 수신하는 간단한 코드 예제입니다. 🎜rrreee🎜위 코드에서는 먼저 수신된 데이터를 저장하기 위한 버퍼 buffer를 정의합니다. 그런 다음 read() 함수를 사용하여 직렬 포트에서 데이터를 읽고 읽은 데이터를 버퍼에 저장합니다. 다음으로 printf() 함수를 사용하여 수신된 데이터를 인쇄합니다. 🎜🎜6. 직렬 포트 장치 닫기🎜🎜프로그램이 종료되면 열려 있는 직렬 포트 장치를 닫아야 합니다. close() 함수를 사용하면 아래와 같이 직렬 포트 장치를 닫을 수 있습니다. 🎜rrreee🎜위 코드는 이전에 열려 있던 직렬 포트 장치를 닫고 관련 리소스를 해제합니다. 🎜🎜위의 구성과 코드 예제를 통해 Linux 시스템에서 직렬 통신 프로그래밍을 구현할 수 있습니다. 물론 실제 응용에서는 예외 처리, 버퍼 관리 등 더 많은 상황을 고려해야 합니다. 이 글이 당신에게 도움이 되기를 바랍니다. 🎜위 내용은 직렬 통신 프로그래밍을 지원하도록 Linux 시스템 구성의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 这就是修复 Windows 11 的 WSL 错误的方法May 03, 2023 pm 07:19 PM
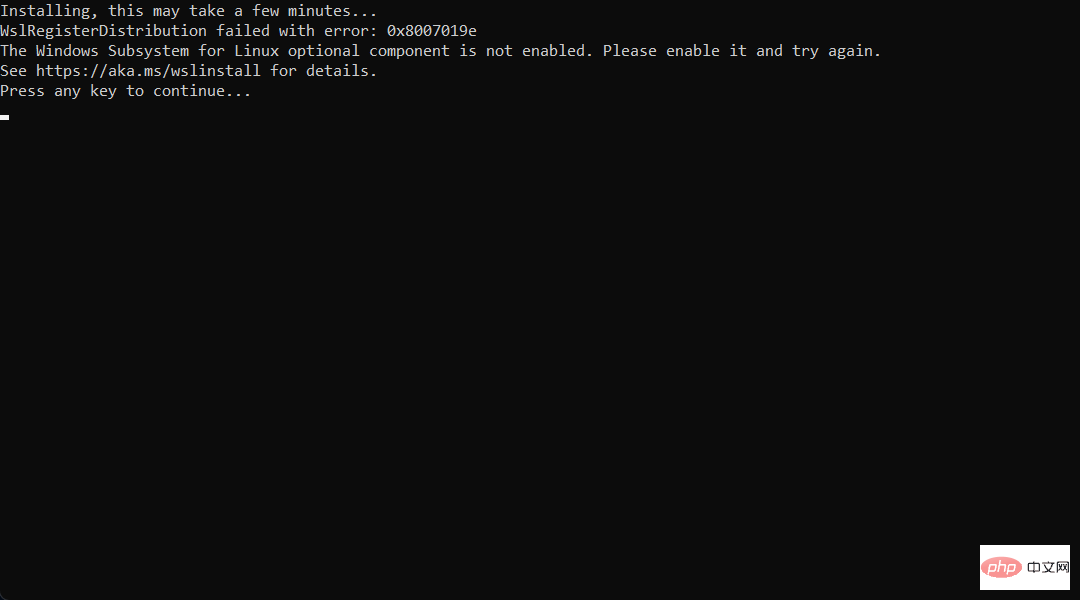
这就是修复 Windows 11 的 WSL 错误的方法May 03, 2023 pm 07:19 PMWindows11中的WSL错误可能由于多种原因而发生。确切的消息是WslRegisterDistributionFailed并带有不同的错误代码。适用于Linux的Windows子系统(WSL)是一项允许开发人员和典型用户在其Windows计算机上安装和使用Linux的功能。尽管此功能对开发人员非常有价值,但它有时会导致难以修复的令人难以置信的复杂情况。幸运的是,这些错误并非不可克服。在这篇文章中,我们将讨论所有可能的原因和解决方案。Windows11中最常见的W
 如何在 Windows 10 或 11 WSL 上安装 Oracle Linux – 子系统Apr 14, 2023 pm 10:07 PM
如何在 Windows 10 或 11 WSL 上安装 Oracle Linux – 子系统Apr 14, 2023 pm 10:07 PM在Windows10上安装OracleLinux8或7.5的步骤|11WSL1.启用WSL–Windows子系统Linux我们需要拥有的第一件事是WSL,如果尚未启用它,请启用它。转到搜索框并输入–打开或关闭Windows功能。在选项出现时,单击以打开相同。在打开的窗口中,向下滚动并选择为Linux的Windows子系统提供的框。然后单击确定按钮。之后重新启动系统以应用更改。2.在Windows11或10上下载OracleLinx8或
 如何处理Linux系统中频繁出现的进程资源耗尽问题Jun 29, 2023 am 09:58 AM
如何处理Linux系统中频繁出现的进程资源耗尽问题Jun 29, 2023 am 09:58 AM如何处理Linux系统中频繁出现的进程资源耗尽问题概述:Linux系统下,有时会出现进程资源耗尽的情况,如CPU负载高、内存占用过多等问题。这些问题可能导致系统性能下降,甚至系统崩溃。本文将介绍一些解决进程资源耗尽问题的常见方法。一、定位问题:监测系统资源:使用top、htop等工具监测系统资源的使用情况,包括CPU、内存、磁盘和网络等。查看进程:使用ps命
 在 Windows 上运行 shell 脚本文件的不同方法Apr 13, 2023 am 11:58 AM
在 Windows 上运行 shell 脚本文件的不同方法Apr 13, 2023 am 11:58 AM适用于 Linux 的 Windows 子系统第一种选择是使用适用于 Linux 或 WSL 的 Windows 子系统,这是一个兼容层,用于在 Windows 系统上本地运行 Linux 二进制可执行文件。它适用于大多数场景,允许您在 Windows 11/10 中运行 shell 脚本。WSL 不会自动可用,因此您必须通过 Windows 设备的开发人员设置启用它。您可以通过转到设置 > 更新和安全 > 对于开发人员来完成。切换到开发人员模式并通过选择是确认提示。接下来,查找 W
 想在 Windows 11 上安装 AlmaLinux?这是怎么做的Apr 30, 2023 pm 08:13 PM
想在 Windows 11 上安装 AlmaLinux?这是怎么做的Apr 30, 2023 pm 08:13 PM在MicrosoftStore中,现在有一个版本的AlmaLinux与适用于Linux的Windows子系统兼容。这为用户提供了一系列令人印象深刻的新选项,因此我们将向您展示如何在Windows11上安装AlmaLinux。它于2021年3月发布,提供了第一个稳定的生产版本,此后该非营利基金会增加了许多新成员。最近的AMD是上个月加入的,时间是2022年3月。借助适用于Linux的Windows子系统,在Windows和Linux世界中工作的开
 如何优化和调整Linux系统的内核参数以提高性能Jun 29, 2023 am 10:24 AM
如何优化和调整Linux系统的内核参数以提高性能Jun 29, 2023 am 10:24 AM如何优化和调整Linux系统的内核参数以提高性能摘要:Linux操作系统是世界上最流行的操作系统之一,拥有强大的性能和灵活的配置选项。本文介绍了如何通过优化和调整Linux系统的内核参数来提高性能。从理解内核参数的含义开始,将探讨常见的性能调优技巧,包括内存管理、磁盘IO、网络和调度器等方面。通过这些优化和调整,用户可以更好地利用Linux系统,提升工作效率
 linux中acpi是什么意思Jun 01, 2023 pm 04:03 PM
linux中acpi是什么意思Jun 01, 2023 pm 04:03 PMlinux中acpi是“Advanced Configuration and Power Interface”的缩写,意思是高级配置与电源管理接口,这是微软、英特尔和东芝共同开发的一种工业标准。ACPI是提供操作系统与应用程序管理所有电源管理接口,包括了各种软件和硬件方面的规范。
 Linux系统中的服务优化指南Jun 18, 2023 pm 02:32 PM
Linux系统中的服务优化指南Jun 18, 2023 pm 02:32 PM随着Linux操作系统在企业中的广泛应用,对其服务的优化需求越来越高。本文将介绍Linux系统中常见的服务优化指南,以帮助企业更好地运维和管理Linux系统。禁止不必要的服务Linux系统中预装了许多服务程序,其中一些可能不会被企业所使用。禁止不必要的服务可以降低系统资源的消耗,并减少系统的安全漏洞。例如,企业如果不需要用到FTP服务,可以通过禁用FTP服务


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

드림위버 CS6
시각적 웹 개발 도구

맨티스BT
Mantis는 제품 결함 추적을 돕기 위해 설계된 배포하기 쉬운 웹 기반 결함 추적 도구입니다. PHP, MySQL 및 웹 서버가 필요합니다. 데모 및 호스팅 서비스를 확인해 보세요.

ZendStudio 13.5.1 맥
강력한 PHP 통합 개발 환경

메모장++7.3.1
사용하기 쉬운 무료 코드 편집기

DVWA
DVWA(Damn Vulnerable Web App)는 매우 취약한 PHP/MySQL 웹 애플리케이션입니다. 주요 목표는 보안 전문가가 법적 환경에서 자신의 기술과 도구를 테스트하고, 웹 개발자가 웹 응용 프로그램 보안 프로세스를 더 잘 이해할 수 있도록 돕고, 교사/학생이 교실 환경 웹 응용 프로그램에서 가르치고 배울 수 있도록 돕는 것입니다. 보안. DVWA의 목표는 다양한 난이도의 간단하고 간단한 인터페이스를 통해 가장 일반적인 웹 취약점 중 일부를 연습하는 것입니다. 이 소프트웨어는
뜨거운 주제
 1371
1371 523819
523819