



01 E-GAS 안전 아키텍처 아이디어
자동차 기능 안전은 전자 및 전기 시스템의 고장으로 인한 인명 피해 위험을 합리적인 범위 내에서 제어하는 것을 목표로 합니다. 다음 그림은 일반적인 전자 및 전기 시스템 하드웨어 구성도입니다. 전자 및 전기 시스템의 구성 요소에는 그림에 보이는 하드웨어 외에 그림에 보이지 않는 소프트웨어도 포함되어 있습니다.
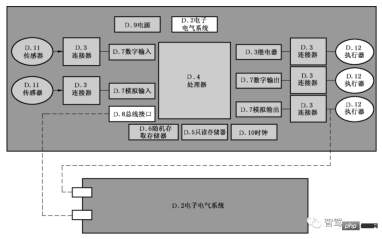
그림 1 일반적으로 사용되는 전자 및 전기 하드웨어 시스템
전자 및 전기 시스템의 오류에는 소프트웨어 및 하드웨어 설계 오류로 인한 시스템 오류와 무작위 하드웨어 오류로 인한 오류가 모두 포함됩니다. . 시스템 아키텍처에 따라 기능적 오류를 예방 및 감지하고, 오류 발생 시 피해를 방지하거나 줄이기 위해 다양한 안전 메커니즘을 설계해야 합니다. 이를 위해서는 이러한 안전 메커니즘을 관리 및 제어하고 기능 안전의 전반적인 개발 어려움을 줄이기 위한 강력한 기능 안전 소프트웨어 아키텍처가 필요합니다.
현재 E-GAS(Standardized E-Gas Monitoring Concept for Gasoline and Diesel Engine Control Units)는 의심할 여지 없이 가장 널리 사용되는 보안 소프트웨어 아키텍처 솔루션입니다. E-GAS는 원래 가솔린/디젤 엔진 관리 시스템을 위한 안전 아키텍처 솔루션으로 제안되었지만 간단한 적용을 거쳐 차체 시스템, 변속기 시스템, 신에너지 3전기 시스템 등에 사용할 수도 있으며 매우 우수한 성능을 발휘합니다. 성능 확장 가능하고 널리 사용됩니다.
아래 그림은 E-GAS의 3레이어 소프트웨어 아키텍처 설계입니다. 소프트웨어는 위에서 아래로 레벨1~3으로 나누어져 있으며, 총 3개의 레이어가 기능 구현 레이어(기능 레벨)입니다. , Level2는 기능 모니터링 레이어(기능 모니터링 레벨), Level3은 컨트롤러 모니터링 레벨입니다. 이 아키텍처는 우수한 계층형 모니터링 프레임워크를 형성하고 기능 안전 분해를 효과적으로 구현합니다. QM(ASIL X) + ASIL X(ASIL X)의 안전 분해 전략이 일반적으로 채택됩니다. 즉, 기능 구현 소프트웨어(레벨 1)는 다음에 따라 개발됩니다. QM 레벨, 기능적 중복 소프트웨어 또는 안전 조치(레벨 2, 레벨 3)는 최고 요구사항 레벨 ASIL X(ASIL X)에 따라 개발되어 기능 소프트웨어의 안전 개발 비용을 효과적으로 줄일 수 있습니다.
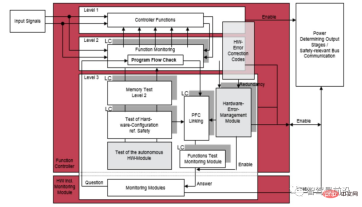
그림 2 E-GAS 3계층 모니터링 아키텍처 체계
Level1 기능 구현 계층
Level1은 기능 구현 계층으로, 세부사항 기능적 모터 컨트롤러의 경우 이 계층은 요청된 토크를 모터의 토크 출력으로 변환합니다.
Level2 기능 모니터링 레이어
Level2는 기능 모니터링 레이어로, Level1 기능이 정상적으로 실행되는지 모니터링하는 데 사용됩니다. Level2의 핵심은 Level1이 정상적으로 실행되고 있는지 판단하는 방법을 설계하는 것입니다. Level1이 정상적으로 실행되고 있는지 판단하는 방법은 모니터링되는 기능과 관련되는 경우가 많지만, 모니터링되는 기능마다 소프트웨어 다양화 및 중복성을 통해 판단 방법이 다릅니다. 그러나 합리성 확인과 같이 더 광범위하게 적용되는 일부 판단 방법도 있습니다.
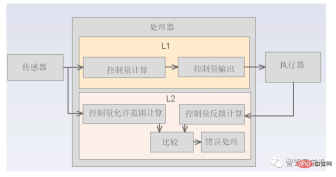
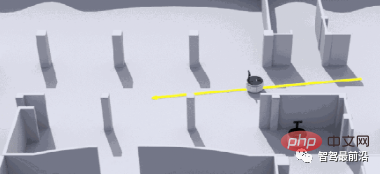
그림 3 타당성 검사
위 그림과 같이 Level2에서 타당성 검사 방법을 사용하여 Level1 기능이 정상적으로 작동하는지 여부를 판단할 때 먼저 이를 기반으로 제어를 계산합니다. 센서에서 입력된 신호가 허용 출력의 합리적인 범위 내에 있는지 확인하고, 액츄에이터에서 피드백된 실제 출력을 계산하여 최종적으로 레벨 1의 실제 출력이 허용 가능한 합리적인 범위 내에 있는지 판단합니다. 합리적인 범위를 벗어나면 레벨 1 기능이 비정상인 것으로 판단하고 오류 처리를 수행한다.
레벨3 컨트롤러 모니터링 레이어
레벨3은 컨트롤러 모니터링 레이어로 주로 세 가지 기능으로 구성됩니다.
전자 및 전기 시스템 하드웨어 진단: 컨트롤러 CPU 코어 오류, RAM 오류, ROM 오류 등과 같은 전자 및 전기 시스템 하드웨어 오류를 모니터링합니다.
독립 모니터링: 컨트롤러 관련 오류가 발생한 후 컨트롤러는 더 이상 안전 관련 로직을 안정적으로 실행할 수 없습니다. 안전을 보장하려면 심각한 MCU 오류 후에도 이를 보장하기 위한 추가 외부 독립 모니터링 모듈이 필요합니다. , 아직 안전한 상태로 진입하는 것은 가능합니다. 이 추가 독립 모니터링 모듈은 일반적으로 감시 기능이 통합된 전원 관리 칩입니다.
응용 흐름 확인: Level1, Level2의 모니터링 프로그램이 정상적으로 실행되는지 모니터링합니다. 이 모니터링 기능은 프로그램 흐름 검사와 Watchdog Feeding을 바인딩하여 구현됩니다. Level1, Level2 관련 모니터링 프로그램이 설정된 순서대로 실행되지 않거나, 지정된 시간 내에 실행되지 않으면 프로그램 흐름 확인에 실패하여 도그를 정상적으로 급식할 수 없어 시스템 안전상태에 진입하게 됩니다.
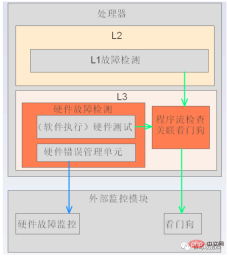
그림 4 Level3 기능 블록 다이어그램
02 해외 기능 안전 소프트웨어 아키텍처 개발
기능 안전과 소프트웨어 아키텍처에 관해서는 "소프트웨어"부터 시작할 수 있습니다. 기능안전성을 준수하는 아키텍처''와 '기능안전성 소프트웨어 아키텍처' 사이의 관계를 살펴본다.
전자는 소프트웨어 개발 관점에서 기능 안전을 갖춘 소프트웨어 아키텍처 설계 프로세스의 준수에 중점을 둡니다. 즉, 소프트웨어 아키텍처 설계 프로세스는 다음과 같이 ISO 26262에서 제시한 다양한 요구 사항을 충족해야 합니다. , 설계 원칙, 설계 요소 요구 사항, 보안 분석 요구 사항, 오류 감지 메커니즘 요구 사항, 오류 처리 메커니즘 및 설계 검증 방법 등이 있습니다. 그 중 소프트웨어 아키텍처 수준의 보안 분석의 주류 방법은 "소프트웨어 FMEA(Failure Mode and Effects)"입니다. 분석)' 및 '소프트웨어 DFA'(종속 실패 분석)'입니다.
후자는 임베디드 소프트웨어 시스템의 관점에서 시스템 수준의 기능 안전을 지원하는 데 중점을 둡니다. E-Gas 보안 아키텍처의 아이디어를 바탕으로 "계층화된 모니터링 아이디어", "보안 대책" 및 "진단 프레임워크"가 "기능 안전 소프트웨어 아키텍처"의 핵심이며 "계층화된 모니터링 아이디어"와 " 보안 조치'는 위에 나와 있습니다. 기사에서 설명한 대로 이 섹션의 나머지 부분에서는 주로 '진단 프레임워크'에 중점을 둡니다. 우리가 사용하는 기본 소프트웨어 개발 플랫폼이 AUTOSAR CP, AP, non-AUTOSAR인지에 관계없이 기능안전 소프트웨어 아키텍처의 설계 아이디어는 유사하며 여기서는 AUTOSAR CP를 기준으로 설명합니다.
1) 기능 안전 진단 프레임워크 기술 요구 사항
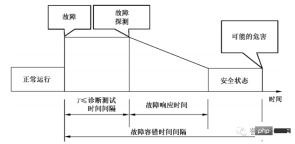
그림 5 오류 응답 시간 및 오류 허용 시간 간격
FTTI(Fault Tolerance Time Interval, Fault Toler)를 결합합니다. 개미 시간 간격) 결함 진단 프로세스를 이해합니다. 결함 발생부터 가능한 위험 발생까지의 기간이 FTTI 시간입니다. 이 기간 동안에는 주로 진단 테스트, 결함 대응 프로세스 및 가능한 위험이 발생하기 전에 안전한 상태로 진입하려는 희망이 있습니다(그림 4.1-8). ). 진단 테스트 프로세스에서는 진단 테스트 트리거링, 오류 확인(디바운스) 등을 고려해야 합니다. 오류 응답 프로세스에서는 합리적인 작동 모드(예: 오류 안전, 오류 작동, 비상 작동 등) 진입, 오류 저장을 고려해야 합니다. , 등.
요약하자면, "진단 프레임워크"의 핵심 설계에서는 진단 테스트 및 오류 대응 프로세스를 포괄하는 것을 고려해야 합니다. 주요 기능 안전 진단 프레임워크 기술 요구 사항은 다음과 같습니다.
- 통합 결함 관리: E-GAS 다계층 모니터링 프레임워크의 각 결함 모니터링 계층에서 보고된 결함의 통합 상태 관리
- 결함 응답 시간 요구 사항: 결함 허용 시간 간격(FTTI)을 충족해야 함 안전 상태 진입 감지) 요구사항
- 독립성 요구사항: 온칩 보안 메커니즘과 기능 간에는 공통적인 원인 문제가 있으며, 독립적인 모니터링(MCU 오프칩 모니터링)이 지원되어야 합니다
- 다양한 요구사항: 소프트웨어 아키텍처는 프레임워크 설계의 일반화 및 지원을 충족해야 합니다. 다양한 보안 전략(프로젝트마다 보안 메커니즘에 대한 요구 사항이 다름)
- 진단 테스트 타이밍: 전원 켜기 및 끄기, 주기, 조건 트리거 등
- 결함 디바운스/지연 확인: 안전 메커니즘의 디바운스 테스트를 지원해야 함 기능, 최소한 시간 기반 및 개수 기반 디바운스 알고리즘 지원
- 진단 이벤트 및 기능 분리: 진단 이벤트 및 기능은 독립적으로 관리되며 a 매핑 관계
- 고장 저장: 고장 정보의 비휘발성 저장 지원
2) 외국 진단 프레임워크 기술의 해석
진단 프레임워크 기술을 해석하기 전에 두 가지 제안이 있습니다. 참고용.
① 제안 1: 필요에 따라 진단 테스트 시기를 결정하세요
a. 전원을 켤 때: 다음은 일반적인 애플리케이션 요구 사항을 기반으로 한 설명입니다. 안전 메커니즘과 해당 기능은 이중 지점을 형성합니다. 잠재적인 다중 지점 오류의 실패율을 줄이기 위해 안전 메커니즘은 일반적으로 시스템 시작 단계(전원이 켜진 경우) 동안 자체 점검을 수행해야 합니다. 또한 다중 프로세서 시스템에서는 진단 테스트 동기화 문제를 고려해야 합니다.
b. 런타임: 크게 정기 진단 테스트와 조건 진단 테스트로 구분됩니다. 진단 주기의 정의에는 FDTI(고장 감지 시간 간격)의 제약 조건을 고려해야 하며, 조건부 진단 테스트는 일반적으로 상태 전환이 발생할 때 또는 기능을 활성화하기 전에 기능을 진단합니다.
c. 전원을 끌 때: 시간이 많이 걸리는 테스트를 수행하도록 선택할 수 있으며 테스트 결과는 일반적으로 다음 시작 시 처리됩니다.
② 권장사항 2: 그룹 진단 테스트 수행
진단 관리(진단 트리거링 및 결함 응답 등 포함)를 용이하게 하려면 심각한 결함/비중대 결함, 진단 테스트 타이밍 및 결함에 따라 그룹화하십시오. 다른 요인. 전원을 켜는 동안 코어 오류, 램 테스트 오류 등과 같은 중대한 오류가 감지되면 오류 응답은 자동 상태(예: MCU가 연속 재설정 상태에 있음)로 처리될 수 있습니다.
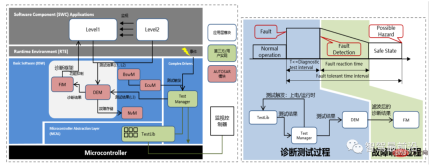
그림 6 "기능 안전 진단 프레임워크" 및 "기능 안전 진단 제어 흐름"
E-Gas 3계층 모니터링 프레임워크 Level1(기능 레벨) 및 Level2(기능 모니터링 레벨) )은 ASW(응용 소프트웨어, 즉 그림 4.1-9의 SWC) 계층에 위치하고, Level3(컨트롤러 모니터링 수준)은 BSW(기본 소프트웨어) 계층에 위치한다. "진단 프레임워크"도 BSW 계층에 있습니다. 위에서 언급한 것처럼 주로 진단 테스트와 오류 대응 프로세스를 다루며, 그 구성과 작업 프로세스는 다음과 같습니다.
- BswM과 EcuM은 주로 전원 켜기 및 끄기 관리를 담당하며 각각 STARTUP, UP 및 SHUTDOWN 단계에서 전원 켜기, 런타임 및 전원 끄기에 대한 진단 테스트를 수행합니다
- ASW-Level1(E- 가스 레벨1) 적용 범위 기능 입력/출력 진단, ASW-레벨2(E-Gas 레벨2)는 일반적으로 ASW-레벨1 ASIL 레벨 분해를 실현하기 위해 ASW-레벨1 기능의 중복 알고리즘으로 구현됩니다. ECU 및 MCU 수준에서 하드웨어 오류를 모니터링합니다(ISO26262(2018)-Part5 Annex D 및 MCU 안전 매뉴얼을 참조하는 것이 좋습니다). 레벨 1 및 레벨 2 공통 원인 오류에 대한 진단을 다루고 다음 사항에 대한 질문 및 답변 감시 메커니즘을 구현합니다. "모니터링 컨트롤러"를 사용한 논리 및 시간 독립적 진단
- TestManager는 TestLib 안전 메커니즘의 진단 테스트를 시작하고 해당 테스트 결과를 수집하는 역할을 담당합니다.
- DEM은 E-Gas 레벨 1/2/3의 테스트 결과를 수집합니다. , 진단 이벤트를 디바운스하고 오류 코드를 표시하며 NvM 스토리지를 통해 오류 정보를 제공합니다. FiM은 DEM 진단 테스트 결과(디바운스 후)를 기반으로 구성된 기능을 표시하고 기능 소프트웨어(ASW-Level1)는 표시를 기반으로 기능 억제를 결정합니다.
위 내용은 스마트카 기능안전 소프트웨어 아키텍처의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 Windows 11 上的智能应用控制:如何打开或关闭它Jun 06, 2023 pm 11:10 PM
Windows 11 上的智能应用控制:如何打开或关闭它Jun 06, 2023 pm 11:10 PM智能应用控制是Windows11中非常有用的工具,可帮助保护你的电脑免受可能损害数据的未经授权的应用(如勒索软件或间谍软件)的侵害。本文将解释什么是智能应用控制、它是如何工作的,以及如何在Windows11中打开或关闭它。什么是Windows11中的智能应用控制?智能应用控制(SAC)是Windows1122H2更新中引入的一项新安全功能。它与MicrosoftDefender或第三方防病毒软件一起运行,以阻止可能不必要的应用,这些应用可能会减慢设备速度、显示意外广告或执行其他意外操作。智能应用
 一文聊聊SLAM技术在自动驾驶的应用Apr 09, 2023 pm 01:11 PM
一文聊聊SLAM技术在自动驾驶的应用Apr 09, 2023 pm 01:11 PM定位在自动驾驶中占据着不可替代的地位,而且未来有着可期的发展。目前自动驾驶中的定位都是依赖RTK配合高精地图,这给自动驾驶的落地增加了不少成本与难度。试想一下人类开车,并非需要知道自己的全局高精定位及周围的详细环境,有一条全局导航路径并配合车辆在该路径上的位置,也就足够了,而这里牵涉到的,便是SLAM领域的关键技术。什么是SLAMSLAM (Simultaneous Localization and Mapping),也称为CML (Concurrent Mapping and Localiza
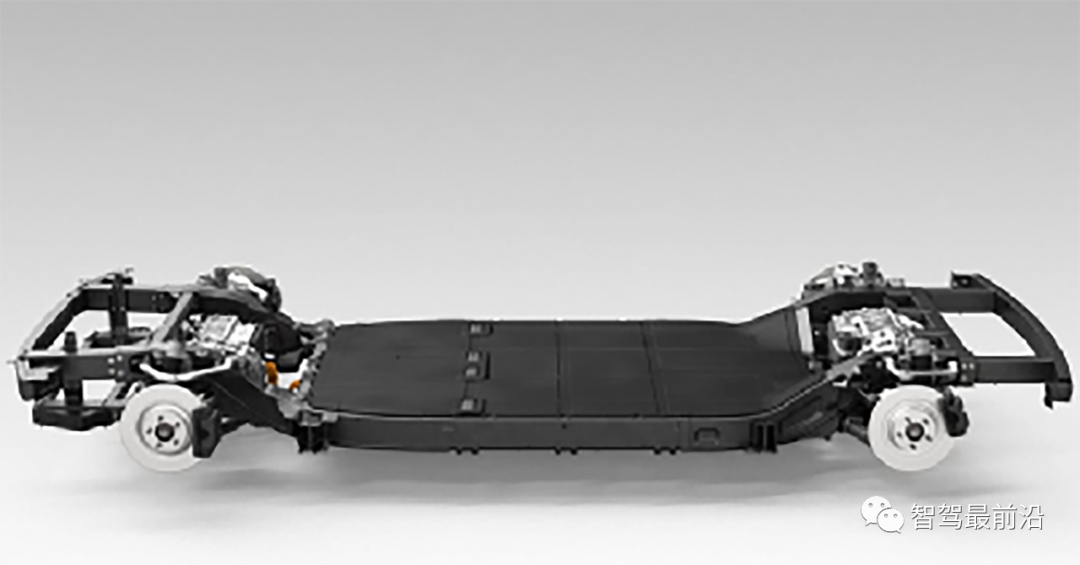 一文读懂智能汽车滑板底盘May 24, 2023 pm 12:01 PM
一文读懂智能汽车滑板底盘May 24, 2023 pm 12:01 PM01什么是滑板底盘所谓滑板式底盘,即将电池、电动传动系统、悬架、刹车等部件提前整合在底盘上,实现车身和底盘的分离,设计解耦。基于这类平台,车企可以大幅降低前期研发和测试成本,同时快速响应市场需求打造不同的车型。尤其是无人驾驶时代,车内的布局不再是以驾驶为中心,而是会注重空间属性,有了滑板式底盘,可以为上部车舱的开发提供更多的可能。如上图,当然我们看滑板底盘,不要上来就被「噢,就是非承载车身啊」的第一印象框住。当年没有电动车,所以没有几百公斤的电池包,没有能取消转向柱的线传转向系统,没有线传制动系
 智能网联汽车线控底盘技术深度解析May 02, 2023 am 11:28 AM
智能网联汽车线控底盘技术深度解析May 02, 2023 am 11:28 AM01线控技术认知线控技术(XbyWire),是将驾驶员的操作动作经过传感器转变成电信号来实现传递控制,替代传统机械系统或者液压系统,并由电信号直接控制执行机构以实现控制目的,基本原理如图1所示。该技术源于美国国家航空航天局(NationalAeronauticsandSpaceAdministration,NASA)1972年推出的线控飞行技术(FlybyWire)的飞机。其中,“X”就像数学方程中的未知数,代表汽车中传统上由机械或液压控制的各个部件及相关的操作。图1线控技术的基本原理
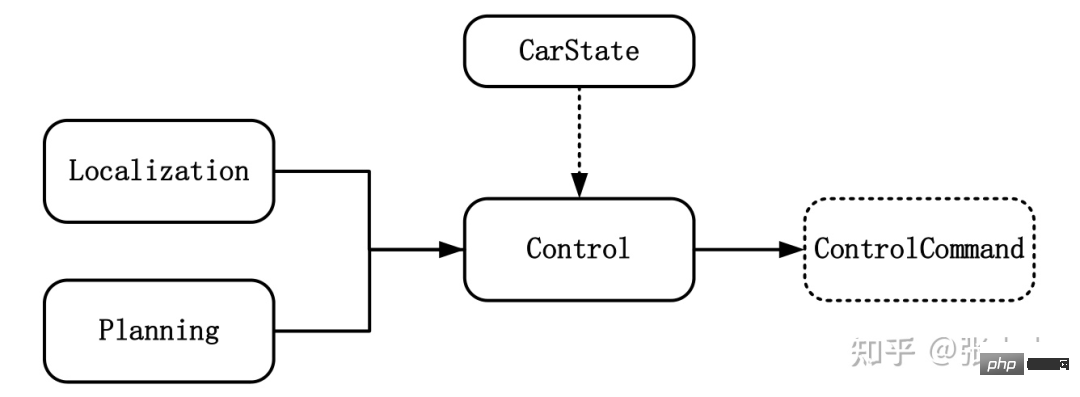 智能汽车规划控制常用控制方法详解Apr 11, 2023 pm 11:16 PM
智能汽车规划控制常用控制方法详解Apr 11, 2023 pm 11:16 PM控制是驱使车辆前行的策略。控制的目标是使用可行的控制量,最大限度地降低与目标轨迹的偏差、最大限度地提供乘客的舒适度等。如上图所示,与控制模块输入相关联的模块有规划模块、定位模块和车辆信息等。其中定位模块提供车辆的位置信息,规划模块提供目标轨迹信息,车辆信息则包括档位、速度、加速度等。控制输出量则为转向、加速和制动量。控制模块主要分为横向控制和纵向控制,根据耦合形式的不同可以分为独立和一体化两种方法。1 控制方法1.1 解耦控制所谓解耦控制,就是将横向和纵向控制方法独立分开进行控制。1.2 耦合控
 李飞飞两位高徒联合指导:能看懂「多模态提示」的机器人,zero-shot性能提升2.9倍Apr 12, 2023 pm 08:37 PM
李飞飞两位高徒联合指导:能看懂「多模态提示」的机器人,zero-shot性能提升2.9倍Apr 12, 2023 pm 08:37 PM人工智能领域的下一个发展机会,有可能是给AI模型装上一个「身体」,与真实世界进行互动来学习。相比现有的自然语言处理、计算机视觉等在特定环境下执行的任务来说,开放领域的机器人技术显然更难。比如prompt-based学习可以让单个语言模型执行任意的自然语言处理任务,比如写代码、做文摘、问答,只需要修改prompt即可。但机器人技术中的任务规范种类更多,比如模仿单样本演示、遵照语言指示或者实现某一视觉目标,这些通常都被视为不同的任务,由专门训练后的模型来处理。最近来自英伟达、斯坦福大学、玛卡莱斯特学
 一文读懂智能汽车驾驶员监控系统Apr 11, 2023 pm 08:07 PM
一文读懂智能汽车驾驶员监控系统Apr 11, 2023 pm 08:07 PM驾驶员监控系统,缩写DMS,是英文Driver Monitor System的缩写,即驾驶员监控系统。主要是实现对驾驶员的身份识别、驾驶员疲劳驾驶以及危险行为的检测功能。福特DMS系统01 法规加持,DMS进入发展快车道在现阶段开始量产的L2-L3级自动驾驶中,其实都只有在特定条件下才可以实行,很多状况下需要驾驶员能及时接管车辆进行处置。因此,在驾驶员太信任自动驾驶而放弃或减弱对驾驶过程的掌控时可能会导致某些事故的发生。而DMS-驾驶员监控系统的引入可以有效减轻这一问题的出现。麦格纳DMS系统,
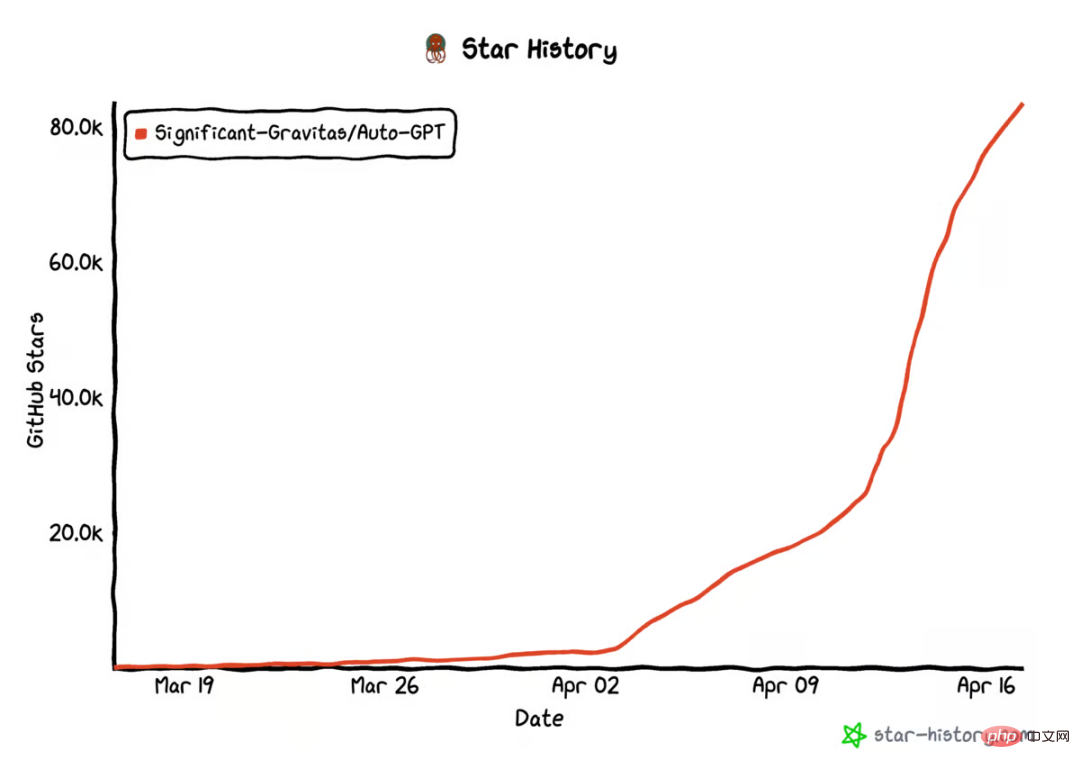 AutoGPT star量破10万,这是首篇系统介绍自主智能体的文章Apr 28, 2023 pm 04:10 PM
AutoGPT star量破10万,这是首篇系统介绍自主智能体的文章Apr 28, 2023 pm 04:10 PM在GitHub上,AutoGPT的star量已经破10万。这是一种新型人机交互方式:你不用告诉AI先做什么,再做什么,而是给它制定一个目标就好,哪怕像「创造世界上最好的冰淇淋」这样简单。类似的项目还有BabyAGI等等。这股自主智能体浪潮意味着什么?它们是怎么运行的?它们在未来会是什么样子?现阶段如何尝试这项新技术?在这篇文章中,OctaneAI首席执行官、联合创始人MattSchlicht进行了详细介绍。人工智能可以用来完成非常具体的任务,比如推荐内容、撰写文案、回答问题,甚至生成与现实生活无


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

SublimeText3 영어 버전
권장 사항: Win 버전, 코드 프롬프트 지원!

SublimeText3 중국어 버전
중국어 버전, 사용하기 매우 쉽습니다.

WebStorm Mac 버전
유용한 JavaScript 개발 도구

SublimeText3 Mac 버전
신 수준의 코드 편집 소프트웨어(SublimeText3)

SublimeText3 Linux 새 버전
SublimeText3 Linux 최신 버전
뜨거운 주제
 1374
1374 523919
523919