
Python에서 arctan 변환 각도를 구현하는 방법

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB앞으로
- 2023-04-19 16:04:062306검색
직교 좌표계
평면 좌표계의 경우 광선 OP와 x축 사이의 각도 θ의 범위는 [0,2π) 또는 (-π,&pi일 수 있습니다. ;] 달리 지정하지 않는 한 후자를 사용하여
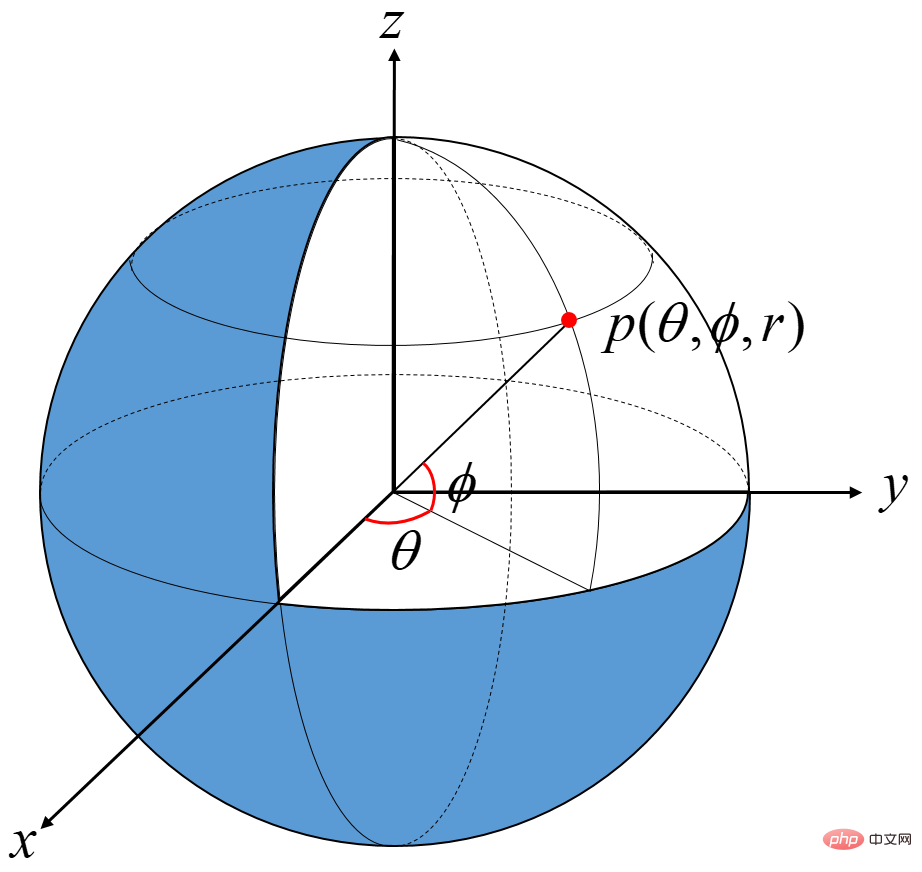
직교 공간 좌표계의 점 Pc = (x, y, z)를 구면 좌표계의 형태로 표현합니다Ps = ( θ , ф , r ) θ的范围,可以取[0,2π)或者(-π,π],如无特殊说明, 我们统一使用后者。
将笛卡尔空间坐标系中的点 Pc = ( x , y , z ) 表示成球体坐标系中的形式 Ps = ( θ , ϕ , r )。
其中
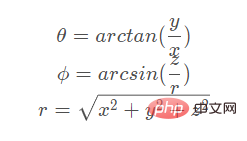
根据球坐标的定义,要求θ∈[−π,π],ϕ∈[−π/2,π/2] ,r∈[0 , +∞)。
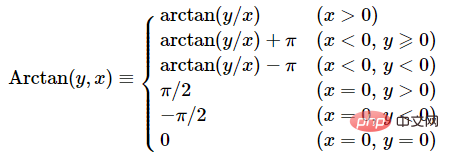
对于 θ,正切函数的周期是 π,因此反正切函数 arctan 一般也只取一个周期,其定义域是 R,值域是(−π/2 , π/2) 。为了解决这个问题,引入了 Arctan 函数,也就是 arctan2 函数。
atan2 函数的使用 atan2(delta_y , delta_x)
import math a = math.atan2(400,-692.820) # 2.6179936760992044 angle = a/math.pi*180 # 149.99998843242386
atan 函数的使用 atan(delta_y / delta_x)
import math
delta_y = 400
delta_x = -692.820
if delta_x == 0:
b = math.pi / 2.0
angle = b/math.pi*180
if delta_y == 0:
angle = 0.0
elif delta_y < 0:
angle -= 180
else:
b = math.atan(delta_y/delta_x)
angle = b/math.pi*180
if delta_y > 0 and delta_x < 0:
angle = angle + 180
if delta_y < 0 and delta_x < 0:
angle = angle - 180
b,angle
# (-0.5235989774905888, 149.99998843242386)atan 和 atan2 的异同
参数的个数不同
两者返回值都是弧度
如果 delta_x等于0,atan2依然可以计算,但是 atan 则需要提前判断,否则就会导致程序出错
象限的处理
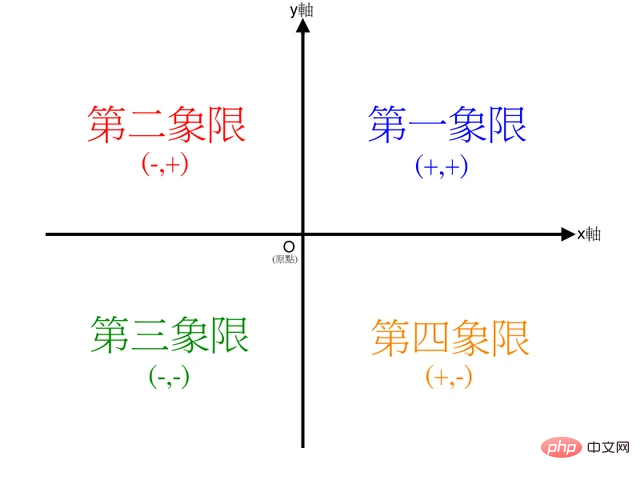
atan2(b,a)是4象限反正切,它的取值不仅取决于正切值b/a,还取决于点(b,a) 落入哪个象限:
当点 (b,a) 落入第一象限(b>0, a>0)时,atan2(b,a)的范围是
0 ~ pi/2当点 (b,a)落入第二象限(b>0, a2016f729810242ee256f5d79180922eb0)时,atan2(b,a)的范围是
-pi/2~0
而 atan(b/a) 仅仅根据正切值为a/b求出对应的角度 (可以看作仅仅是2象限反正切):
当 b/a > 0 时,atan(b/a)取值范围是
0 ~ pi/2当 b/a a428a9a19c89d16d800282a33caa38620, a>0)或
第四象限(bfaf8bb8ba0f442a0df2432c638c997200)时,atan2(b,a) = atan(b/a)-
点 (b,a) 落入
第二象限 (b>0, a87f6b943ff28f63a8989f8ed817318e00,故 atan(b/a) 取值范围是 <code>0 ~ pi/2,而此时atan2(b,a)的范围是-pi~-pi/2
🎜🎜구면좌표의 정의에 따르면, θ∈[−π,π], ф∈[−π/2,π/2], r∈[0, +∞). 🎜🎜 θ의 경우 탄젠트 함수의 주기는 π이므로 아크탄젠트 함수 arctan은 일반적으로 한 주기만 취하고 도메인은 R이며 값 범위는 (#minus;π/ 2, ∅/2). 이 문제를 해결하기 위해 arctan2 함수라고도 알려진 Arctan 함수가 도입되었습니다. 🎜🎜🎜🎜atan2 함수 사용법 atan2(delta_y, delta_x)🎜rrreee🎜atan 함수 사용 atan(delta_y / delta_x)🎜rrreee🎜atan과 atan2의 유사점과 차이점🎜- 🎜매개변수 개수가 다릅니다🎜🎜
- 🎜반환값 둘 다 동일한 라디안🎜🎜
- 🎜delta_x가 0이면 atan2를 계산할 수 있지만 atan을 미리 판단해야 합니다. 그렇지 않으면 프로그램 오류가 발생합니다🎜🎜
- 🎜사분면 처리🎜🎜 🎜🎜
 🎜🎜atan2(b,a)는 4사분면 아크 탄젠트입니다. 값은 접선 값 b/a에 따라 달라질 뿐만 아니라 점 (b, a)가 어느 사분면에 속하는지에 따라 달라집니다. 🎜
🎜🎜atan2(b,a)는 4사분면 아크 탄젠트입니다. 값은 접선 값 b/a에 따라 달라질 뿐만 아니라 점 (b, a)가 어느 사분면에 속하는지에 따라 달라집니다. 🎜- 🎜점 (b, a) 첫 번째 사분면(b>0, a>0)에 속하며 atan2(b,a)의 범위는
0 ~ pi/2🎜🎜 - 🎜점(b, a)가 두 번째 사분면(b>0, api/2 ~ pi🎜🎜
- 🎜점(b, a) 제3사분면(b-pi~-pi/2🎜🎜
- 🎜점( b,a)는 제4사분면(b0)에 속하며 atan2(b,a)의 범위는
-pi/2~0🎜🎜🎜🎜이고 atan(b /a)는 a/b의 탄젠트 값만을 기준으로 계산됩니다. 해당 각도(2 사분면의 아크 탄젠트로 간주될 수 있음): 🎜- 🎜 b/a > 0일 때 atan(b/a)의 값 범위는
0 ~ pi/2🎜🎜 - 🎜b/a ea40f26d5dc15c2096d328d98cfd2ad9 0, a, b/a-pi/2~0입니다. atan2(b,a)는
pi/2 ~ pi이므로 atan(b/a)에서 계산한 각도 값에 180을 더해야 합니다. 🎜🎜 - 🎜점 (b,a)는
3사분면(b, b/a>0에 속하므로 atan(b/a의 값 범위는 )는 <code>0 ~ pi/2이고 이때 atan2(b,a)의 범위는-pi~-pi/2이므로 atan(b/a ) 각도를 계산합니다. 값이 180만큼 감소합니다. 🎜🎜🎜🎜결론: atan과 atan2 함수는 atan2 함수를 사용하는 것이 좋습니다🎜
- 🎜 b/a > 0일 때 atan(b/a)의 값 범위는
- 🎜점 (b, a) 첫 번째 사분면(b>0, a>0)에 속하며 atan2(b,a)의 범위는
위 내용은 Python에서 arctan 변환 각도를 구현하는 방법의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!