
자율주행 하드웨어가 사전 내장된 후 자동차 회사는 데이터 폐쇄 루프를 어떻게 구현합니까?

- 王林앞으로
- 2023-04-15 09:46:021463검색
하드웨어 사전 임베딩은 자율 주행 추세에 맞춰 자동차 OEM이 채택한 새로운 모델입니다. 즉, 자동차에 하드웨어를 사전 임베딩함으로써 사용자는 소프트웨어를 지속적으로 업그레이드하기만 하면 후속 차량을 더 잘 활용할 수 있습니다. OEM이 모델을 시장에 출시해야 한다는 압력을 줄이는 동시에 경험을 쌓을 수 있습니다. 하드웨어 사전 임베딩과 OTA 원격 업그레이드 사이에는 반드시 필요한 연결이 있습니다. 하드웨어 사전 임베딩에 대해 설명한 후 OTA의 원리에 대해 이야기하겠습니다.
그 전에 먼저 하드웨어 사전 내장이나 OTA 모두 제거할 수 없는 주제인 자동차 회사의 연구 개발 과정에서 데이터 폐쇄 루프를 어떻게 달성합니까?
하드웨어 프리임베딩과 OTA의 경우 나가서 좌회전하면 선미에서 정리된 내용을 보실 수 있습니다.
본론으로 돌아가서, 이번 호의 주제로 돌아가겠습니다. 자율 주행 하드웨어가 사전 내장된 후 자동차 회사는 데이터 폐쇄 루프를 어떻게 실현합니까?

5단계만으로 데이터 폐쇄 루프를 달성할 수 있습니다.
NI는 데이터 폐쇄 루프를 생성하기 위한 데이터 수집/처리를 위한 5단계 방법을 제안합니다. 광고 테스트
- 빅 데이터 관리
- 시나리오 가상화
- 데이터 개방 루프 피드백
- 데이터 폐쇄 루프
데이터 수집부터 데이터 폐쇄 루프까지, 단 5단계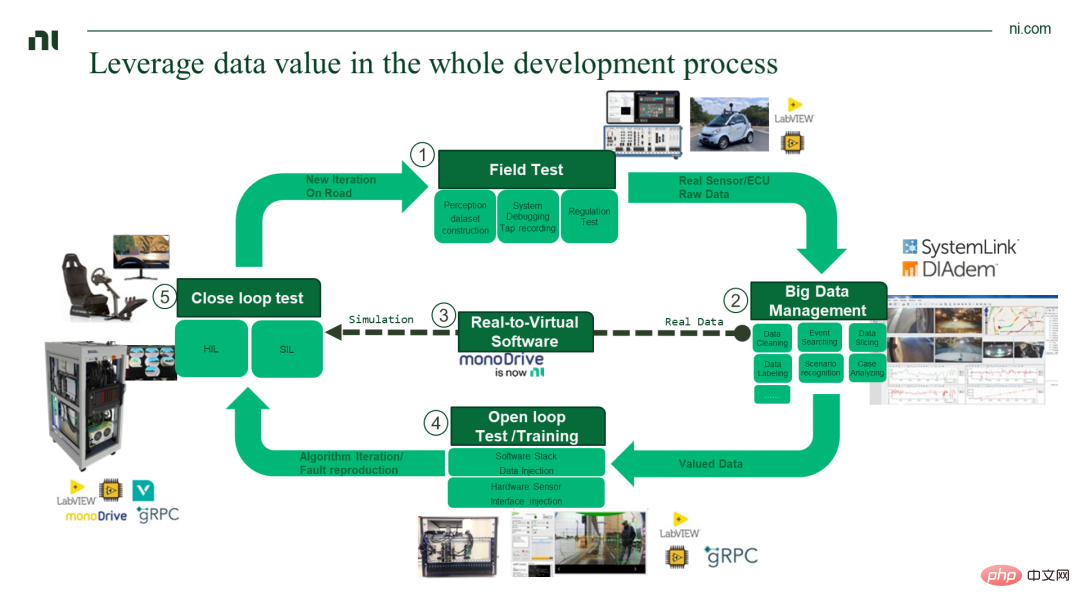
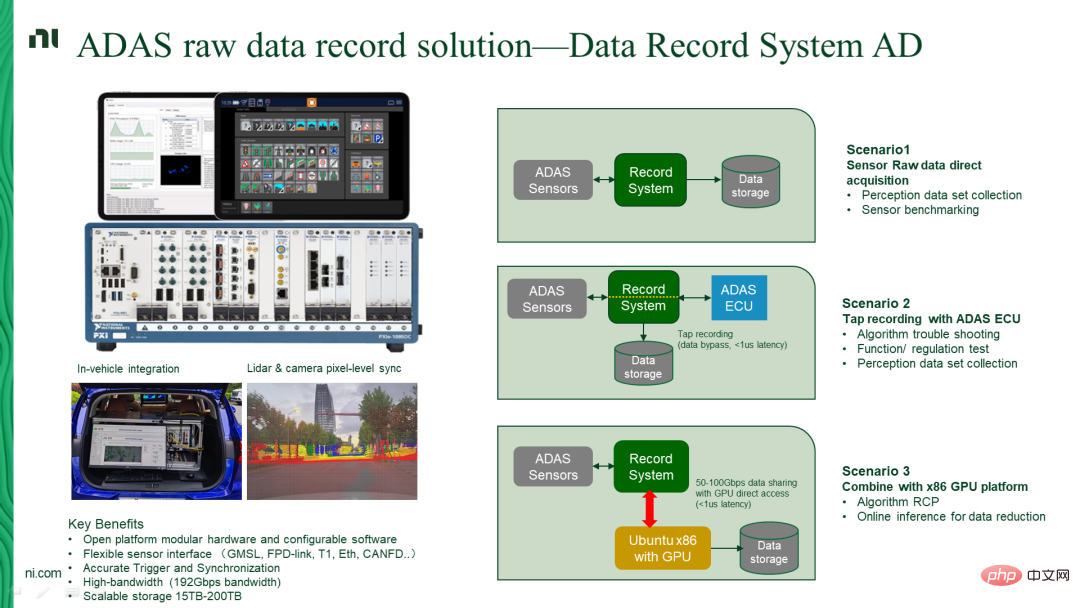
1. 도로 테스트 - 데이터 기록 시스템 AD
도로 테스트는 차량 내 통신이든 차량 간 통신이든 실제 장면 데이터를 수집하는 중요한 소스입니다. , 자동 테스트 시스템에서는 대량의 데이터를 처리해야 합니다. 일반적으로 데이터 수집, 동기화 및 저장 장비가 필요합니다.
자율주행차에는 어떤 종류의 센서가 필요한가요?자율주행차는 센싱, 의사결정, 제어 기능이 통합된 자율주행차입니다. 그 중 센싱 시스템은 인간 운전자의 시각, 청각, 촉각 등의 기능을 대체하고, 카메라로 수집한 대규모 교통량을 통합하고, 레이더 및 기타 센서는 환경 데이터를 통해 다양한 교통 요소를 정확하게 식별하여 자율주행차 의사결정 시스템을 지원합니다.
1. 카메라
카메라는 영상 수집 방식에 따라 디지털 카메라와 아날로그 카메라 두 가지로 분류됩니다.
디지털 카메라는 일반적으로 차량에 사용되며, 비디오 캡처 장비에서 생성된 아날로그 비디오 신호를 디지털 신호로 변환한 다음 컴퓨터에 저장할 수 있습니다.아날로그 카메라는 특정 비디오 캡처 카드를 통해 캡처된 비디오 신호를 디지털 모드로 변환한 다음 컴퓨터로 변환하여 사용하기 전에 압축할 수만 있습니다.
예를 들어, 우리가 사용하는 유선 전화는 아날로그 신호이므로 통화 중에 소음(현재 소리 또는 들리지 않음)이 발생하기 쉽습니다. 좋은 통화 품질을 유지하기 위해 당사 휴대폰은 휴대폰의 아날로그 신호를 디지털화합니다. 동일한 원리를 사용하면 디지털 카메라를 사용하여 이미지의 노이즈를 효과적으로 줄이고 개선할 수 있습니다. 이미징 효과.
 사진 출처: 보쉬 공식 홈페이지
사진 출처: 보쉬 공식 홈페이지
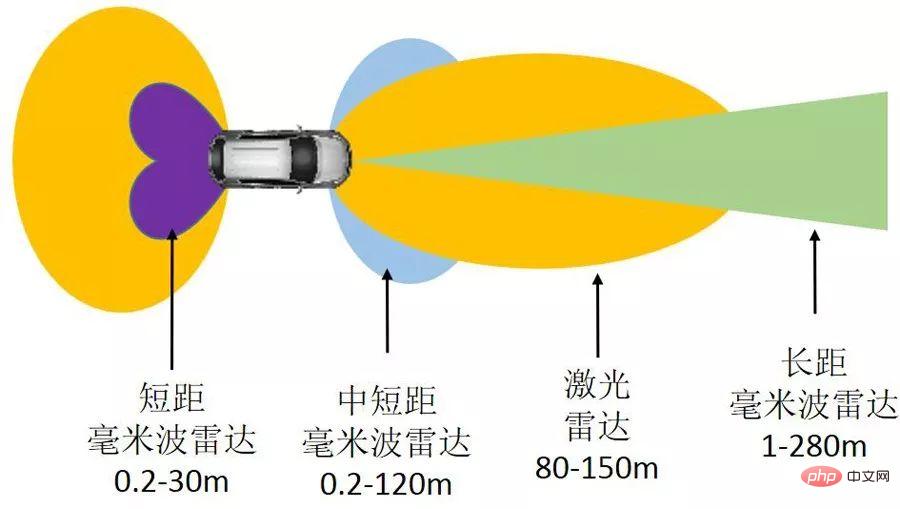
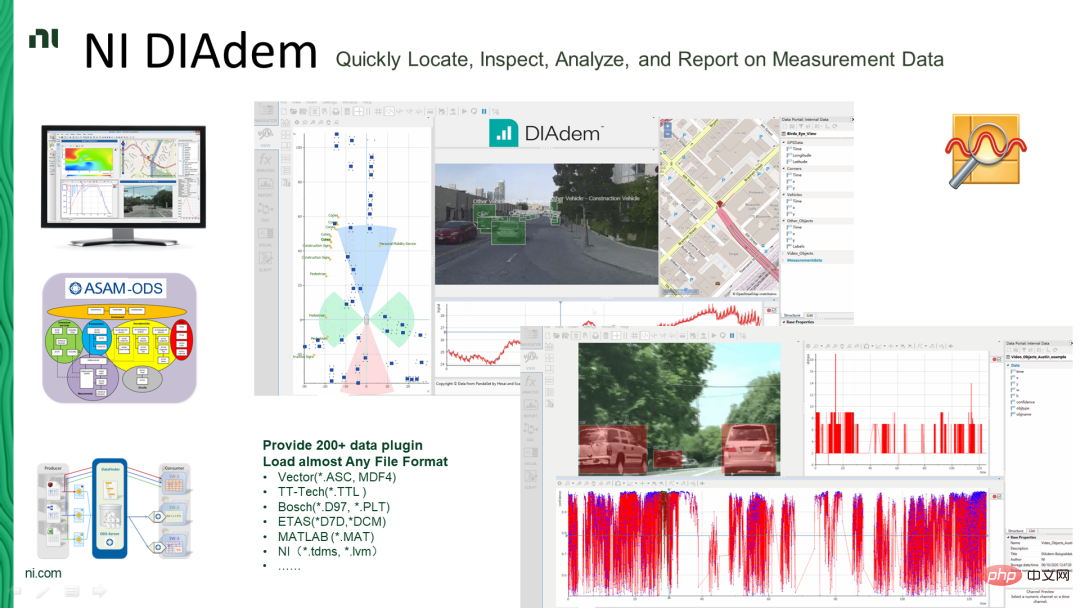
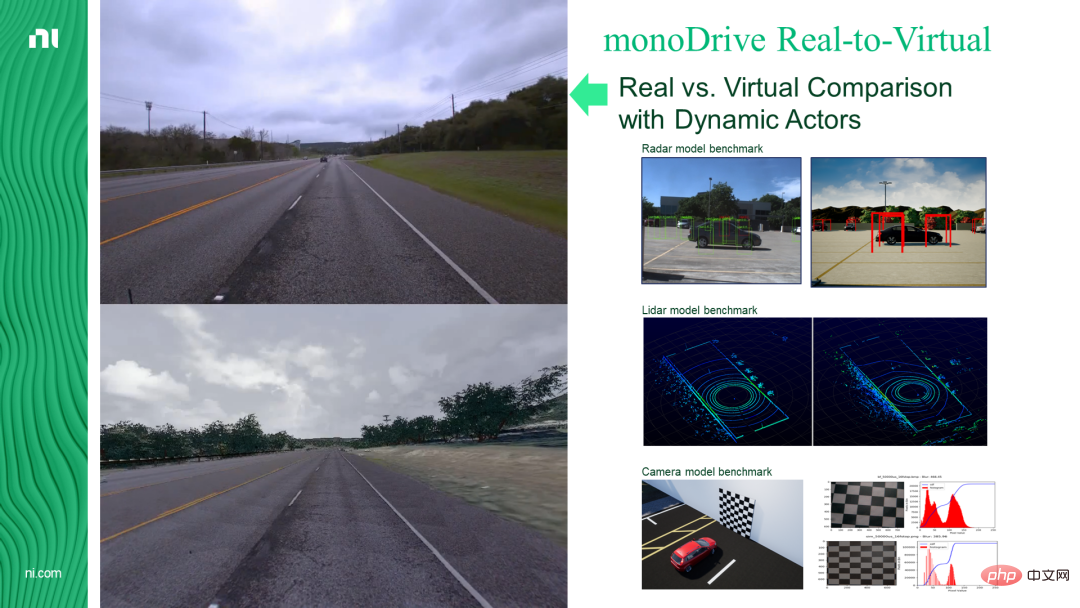
레이다는 주변 환경을 능동적으로 감지할 수 있으며 시각 센서에 비해 외부 환경의 영향을 덜 받습니다. 레이더는 표적에 전자파를 방출하고 에코를 수신하여 표적의 거리, 방향, 거리 변화율 등의 데이터를 얻습니다. 레이더는 전자파 대역에 따라 라이더, 밀리미터파 레이더, 초음파 레이더의 세 가지 범주로 나눌 수 있습니다. NI가 제공하는 PXI 플랫폼 기반의 모듈형 데이터 수집 솔루션은 여러 대의 카메라, 차량 이더넷, CAN/CANFD, GPS 등의 데이터 수집을 충족할 수 있으며, 연속적인 단계. 예를 들어 ADAS 도메인 컨트롤러는 기본적으로 개발 및 반복 단계에 있으며, NI 테스트 장비를 미들웨어로 사용하여 데이터 우회 수집 방식을 통해 데이터를 다시 수집하면 센서가 ECU 데이터 링크가 파괴되지 않습니다. . 또한 NI 솔루션은 15TB~200TB의 데이터 저장 용량을 지원합니다. 수집된 데이터의 정확성을 보장하려면 데이터를 기록하는 차량에 지능형 주행 수준에 맞는 센서와 측정 기술이 장착되어야 합니다. 주요 센서 유형에는 카메라, 밀리미터파 레이더, 라이더가 포함됩니다. 시스템의 중심에는 모든 센서로부터 데이터를 수집하고 현재 환경의 모델을 실시간으로 계산하는 퓨전 컨트롤러가 있으며, 이 데이터는 주행, 조향 및 제동 시스템을 제어하는 데 사용됩니다. 다양한 센서, ECU 및 통신 데이터 기록의 요구를 충족하는 고성능 데이터 수집 시스템은 지속적인 작동을 위해 특별히 설계되어야 하며 카메라, 밀리미터파의 원시 데이터를 측정할 수 있는 신뢰성이 높은 RAID 저장 장치를 제공해야 합니다. 레이더 및 LiDAR 테스트에는 추가 참조 카메라 비디오 데이터뿐만 아니라 차량 및 차량 이더넷, CAN, CANFD, FlexRay 및 기타 여러 버스 데이터의 정확한 위치를 제공하는 관성 내비게이션 시스템 데이터도 포함되어 있습니다. 프로세스 측면에서 빅 데이터 관리는 차량 관리, 데이터 센터 및 터미널 데이터 사용의 세 부분으로 나뉩니다. 차량에서 데이터센터로 데이터를 전송하는 과정에서는 데이터 마이그레이션 등 백홀(Backhaul) 방식이 일반적으로 사용되며, 데이터 용량은 차량 1대당/일 10~100TB에 달할 수 있다. 결과적으로 데이터 센터는 주로 차량의 4G 또는 5G 네트워크를 통해 수행되는 차량을 실시간으로 모니터링할 수도 있습니다. 다양한 레벨의 차량의 경우 수집해야 하는 데이터의 양도 기하급수적으로 늘어났습니다. 현재 일반적인 L3 단계를 예로 들면, 4K 초고화질 카메라, 128라인 라이더 및 기타 센서가 도입되면서 데이터 수집 시스템이 하루 8시간 동안 기록하는 데이터의 양은 무려 30TB에 이른다. . 획득 시스템은 고대역폭, 고용량 데이터 저장을 제공해야 하며, 데이터를 데이터 센터에 간편하게 전송하는 방법도 고려해야 합니다. 예를 들어, 데이터는 전용 데이터 업로드 머신을 통해 PB 용량의 데이터 센터로 전송됩니다. 이러한 클라우드 기반 도구 외에도 또 다른 데이터 마이닝 아티팩트인 DIAdem이 있습니다. 도로 테스트 데이터, 다중 소스 데이터 이미지, 포인트 클라우드 및 일부 버스 데이터에 대한 해당 데이터 시각화 및 데이터 마이닝을 구현하기 위해 클라우드에 배포할 수 있습니다. DIAdem은 200개 이상의 데이터 플러그인을 제공할 수 있으며 ASC, MDF4, TTL, MAT 등과 같은 테스트 제조업체의 다양한 유형의 데이터 형식과 호환됩니다. 도로 테스트를 통해 데이터를 수집한 후 데이터를 정리 및 분류하고 장면을 선택하고 최종적으로 실제 도로 테스트와 가상 시뮬레이션 테스트를 결합하는 작업이 필요합니다. monoDrive는 충실도가 높은 센서 물리적 모델링과 장면 의미론적 분할을 달성할 수 있는 도구입니다. 또한 클라우드 시뮬레이션 기능을 지원하고 수많은 테스트 사례를 클라우드에 배포하여 시뮬레이션 진행을 가속화할 수 있습니다. monoDrive의 또 다른 중요한 장점은 실제 가상 장면 자동 생성의 확장된 기능입니다. 장면 재구성이나 센서 모델링 과정에서 NI는 그에 따라 실제 센서 데이터와 가상 센서 데이터에 라벨을 붙일 수 있다는 점을 언급할 가치가 있습니다. 실제 차량 데이터를 시뮬레이션 시나리오로 변환하고, 대량의 실제 차량 데이터 축적을 기반으로 데이터 기반 R&D 모델을 구현하는 도구입니다. ▲ 장면 전환 효과 수집 툴체인은 엄청난 양의 동적 데이터와 정적 데이터의 배열 및 조합을 지원하여 편차 문제를 해결합니다. 케이스 디자인과 실제 상황 사이의 큰 질문은 자율주행 시뮬레이션을 현실 세계에 더 가깝게 만듭니다. ▲ 의미론적 장면 변환 도구 체인 이 단계는 원본을 수행합니다 데이터는 ADAS 인식 소프트웨어로 다시 피드백되고, 그 중 일부는 주로 일부 모델의 테스트 부분을 위해 일부 소프트웨어 피드백을 수행하기 위해 소프트웨어 스택으로 직접 다시 피드백됩니다. 또 다른 부분은 실제 ECU에 직접 피드백되어 도로 테스트 중에 발견한 일부 상황을 보다 현실적으로 재현할 수 있습니다. NI 시스템 아키텍처의 구성: 사용자 데이터 센터, Linux 플랫폼 기반의 Replay PC, NI PXI 플랫폼 데이터 폐쇄 루프를 형성하고 원시 데이터의 가치, 점점 더 많은 자동차 회사가 이러한 클러스터 데이터 피드백 시스템을 구축하고 있습니다. 많은 자동차 회사에서는 AEB 기능을 정의할 때 일반적으로 AEB 기능이 100,000km 또는 200,000km 동안 잘못 실행되어서는 안 된다고 요구합니다. 예를 들어주세요 - 도로 테스트 중 80,000km를 주행했는데 갑자기 잘못된 트리거가 발생하면 돌아가서 해당 소프트웨어를 수정해야 합니다. 소프트웨어를 수정한 후에도 100,000km를 더 달려야 합니까? 분명히 이 모든 것을 다시 수행하는 것은 많은 시간과 경험을 낭비하게 될 것입니다. 이러한 과제에 직면했을 때 효과적인 방법은 무엇입니까? Wang Shuai는 "80,000km의 첫 번째 도로 테스트에서 문제가 발생하면 이전 마일리지 데이터가 기록되도록 할 수 있습니다. 그런 다음 문제가 발견되면 소프트웨어를 반복적으로 수정합니다. 수정한 후 소프트웨어를 사용하면 수집된 원본 데이터를 사용하여 소프트웨어가 원본 데이터에서 정상적으로 실행될 수 있는지 테스트합니다. 이를 통해 투자가 줄어들어 개발 속도가 빨라집니다. 루프 테스트 – SIL 및 HIL2. 레이더
2. 빅 데이터 관리 - DIAdem
3. 장면 가상화 - monoDrive


4. 데이터 개방 루프 피드백 - PXI 플랫폼 기반 시스템 아키텍처
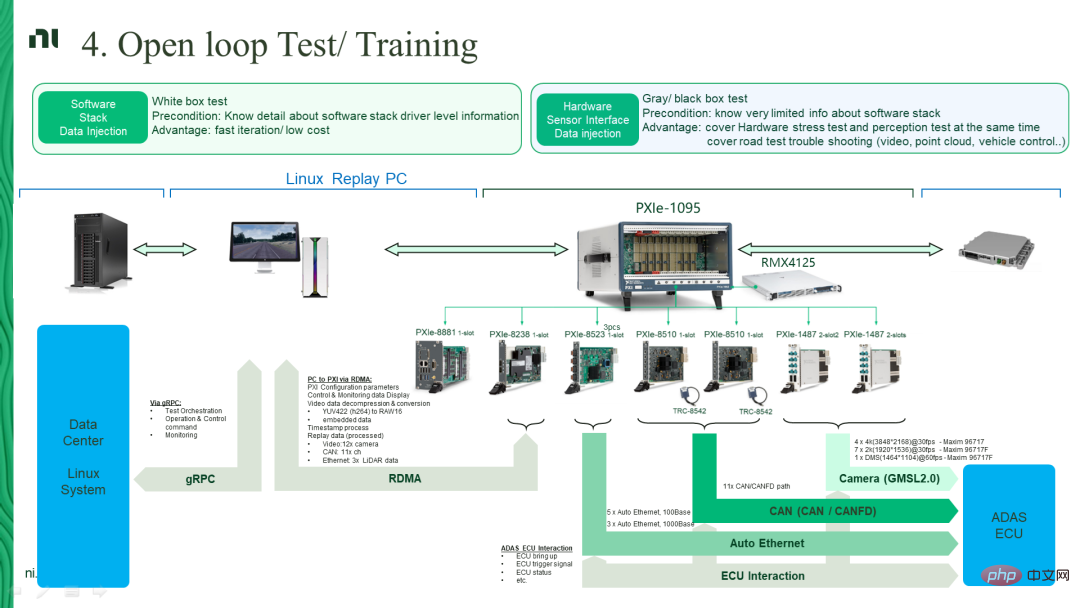
폐쇄 루프 테스트에는 일반적으로 SIL(software-in-the-loop) 및 HIL(hardware-in-the-loop)이 포함됩니다. Software-in-the-loop 측면에서 NI의 솔루션은 monoDrive 플랫폼을 사용하여 클라우드에 배치로 배포할 수 있는 환경을 제공하는 것입니다. Hardware-in-the-loop 측면에서 NI의 솔루션은 PXI 플랫폼과 카메라, 차량 버스, 데이터 동기화 분야의 NI 장점을 활용하여 여러 유형의 센서에 대한 데이터 주입 기능을 갖춘 폐쇄 루프 시스템을 구현하는 것입니다.
위 내용은 자율주행 하드웨어가 사전 내장된 후 자동차 회사는 데이터 폐쇄 루프를 어떻게 구현합니까?의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!