




1. TransBigData 소개
TransBigData는 일반 교통 시공간 빅데이터(예: 택시 GPS 데이터, 공유 자전거 데이터, 버스 GPS 데이터 등)를 빠르고 간결하게 처리하는 방법을 제공합니다. TransBigData는 트래픽 시공간 빅데이터 분석의 각 단계에 대한 다양한 처리 방법을 제공합니다. 코드는 간결하고 효율적이며 유연하며 간결한 코드로 복잡한 데이터 작업을 구현할 수 있습니다.
현재 TransBigData는 주로 다음과 같은 방법을 제공합니다.
- 데이터 전처리: 데이터 세트에 대한 데이터 양, 기간, 샘플링 간격 등 기본 정보를 빠르게 계산하는 방법을 제공하고 다양한 데이터에 대해 해당 정리 방법도 제공합니다. 소음.
- 데이터 래스터화: 연구 영역 내에서 여러 유형의 지리적 래스터(직사각형, 삼각형, 육각형 및 지오해시 래스터)를 생성하고 일치시키는 방법 시스템을 제공합니다. 이를 통해 공간 점을 벡터화된 방식으로 알고리즘 방식으로 신속하게 변환할 수 있습니다. 데이터는 지리적 래스터.
- 데이터 시각화: 시각화 패키지 keplergl을 기반으로 간단한 코드를 사용하여 Jupyter Notebook에 데이터를 대화형 및 시각적으로 표시할 수 있습니다.
- 궤적 처리: 궤적 데이터 GPS 지점에서 궤적 선 유형 생성, 궤적 지점 조밀화 및 희박화 등
- 지도 기반 지도, 좌표 변환 및 계산: 지도 기반 지도와 다양한 특수 좌표계 간의 좌표 변환을 로드하고 표시합니다.
- 구체적인 처리 방법 : 택시 GPS 데이터에서 주문 시작점과 끝점을 추출하고, 휴대폰 신호 데이터에서 거주지와 직장을 식별하고, 지하철망 GIS 데이터에서 네트워크 토폴로지를 구성하고 계산하는 등 다양한 특정 데이터에 해당 처리 방법을 제공합니다. 최단 경로 등
TransBigData는 pip 또는 conda를 통해 설치할 수 있습니다. 설치하려면 명령 프롬프트에서 다음 코드를 실행하세요.
pip install -U transbigdata
설치가 완료된 후 Python에서 다음 코드를 실행하여 TransBigData 패키지를 가져옵니다.
import transbigdata as tbd
2. 데이터 전처리
TransBigData는 데이터 처리에 일반적으로 사용되는 Pandas 및 GeoPandas 패키지와 원활하게 연결될 수 있습니다. 먼저 Pandas 패키지를 소개하고 택시 GPS 데이터를 읽습니다.
import pandas as pd
# 读取数据
data = pd.read_csv('TaxiData-Sample.csv',header = None)
data.columns = ['VehicleNum','time','lon','lat','OpenStatus','Speed']
data.head()결과는 그림 2에 표시됩니다.

▲ 그림 2 택시 GPS 데이터
그런 다음 GeoPandas 패키지를 도입하여 지역 정보를 읽습니다. 연구 범위 및 표시:
import geopandas as gpd # 读取研究范围区域信息 sz = gpd.read_file(r'sz/sz.shp') sz.plot()
결과는 그림 3에 표시됩니다.

▲ 그림 3 연구 범위의 지역 정보
TransBigData 패키지는 교통 시공간 데이터에 대한 몇 가지 일반적인 전처리 방법을 통합합니다. 그 중 tbd.clean_outofshape 메소드는 데이터와 연구 범위 영역 정보를 입력하고, 연구 범위 밖의 데이터를 제거할 수 있다. tbd.clean_taxi_status 메소드는 택시 GPS 데이터에서 순간적인 승객 상태 변화 기록을 제거할 수 있다. 전처리 방법을 사용할 때 데이터 테이블의 중요 정보 열에 해당하는 열 이름을 전달해야 합니다. 코드는 다음과 같습니다.
# 数据预处理 #剔除研究范围外的数据,计算原理是在方法中先栅格化后栅格匹配研究范围后实现对应。因此这里需要同时定义栅格大小,越小则精度越高 data = tbd.clean_outofshape(data, sz, col=['lon', 'lat'], accuracy=500) # 剔除出租车数据中载客状态瞬间变化的数据 data = tbd.clean_taxi_status(data, col=['VehicleNum', 'time', 'OpenStatus'])
위 코드를 처리한 후 연구 외부의 데이터를 결합했습니다. 승객 상태의 즉각적인 변화에 대한 데이터가 포함된 택시 GPS 데이터의 범위는 제거됩니다.
3. 데이터 래스터화
래스터 형식(지리적 공간에서 동일한 크기의 그리드)은 데이터 분포를 표현하는 가장 기본적인 방법입니다. GPS 데이터가 래스터화된 후 각 데이터 포인트에는 해당 위치의 래스터 정보가 포함됩니다. 래스터를 사용하여 데이터의 분포를 표현할 때, 그것이 나타내는 분포는 실제 상황에 가깝습니다.
TransBigData 도구는 완전하고 빠르고 편리한 래스터 처리 시스템을 제공합니다. 래스터 분할을 위해 TransBigData를 사용하는 경우 먼저 래스터화 매개변수(래스터 좌표계를 정의하는 것으로 이해될 수 있음)를 결정해야 합니다. 매개변수는 래스터화를 빠르게 수행하는 데 도움이 될 수 있습니다.
# 定义研究范围边界 bounds = [113.75, 22.4,114.62, 22.86] # 通过边界获取栅格化参数 params = tbd.area_to_params(bounds,accuracy = 1000) params
출력:
{'slon': 113.75,
'slat': 22.4,
'deltalon': 0.00974336289289822,
'deltalat': 0.008993210412845813,
'theta': 0,
'method': 'rect',
'gridsize': 1000} 내용 이때 출력되는 래스터화 매개변수 params 중 래스터 좌표계의 원점 좌표(slon, slat), 단일 래스터의 경도 및 위도 길이와 너비(deltalon, deltalat), 래스터의 회전 각도(theta)가 저장됩니다. , 래스터 그리드의 모양(메서드 매개변수, 값은 정사각형, 삼각형, 육각형 헥사일 수 있음) 및 그리드의 크기(그리드 크기 매개변수, 미터 단위)입니다.
래스터화 매개변수를 얻은 후 TransBigData에서 제공하는 방법을 사용하여 래스터 일치 및 GPS 데이터 생성과 같은 작업을 수행할 수 있습니다.
전체 래스터 처리 방법 시스템은 그림 4에 나와 있습니다.

▲ 그림 4 TransBigData에서 제공하는 래스터 처리 시스템
tbd.GPS_to_grid 방법을 사용하면 각 택시에 대한 GPS 포인트를 생성할 수 있습니다. LONCOL 및 LATCOL이 생성되며 이 두 열은 함께 래스터를 지정합니다.
# 将GPS数据对应至栅格,将生成的栅格编号列赋值到数据表上作为新的两列 data['LONCOL'],data['LATCOL']= tbd.GPS_to_grids(data['lon'],data['lat'],params)
下一步,聚合集计每一栅格内的数据量,并为栅格生成地理几何图形,构建GeoDataFrame:
# 聚合集计栅格内数据量 grid_agg=data.groupby(['LONCOL','LATCOL'])['VehicleNum'].count().reset_index() # 生成栅格的几何图形 grid_agg['geometry']=tbd.grid_to_polygon([grid_agg['LONCOL'],grid_agg['LATCOL']],params) # 转换为GeoDataFrame grid_agg=gpd.GeoDataFrame(grid_agg) # 绘制栅格 grid_agg.plot(column = 'VehicleNum',cmap = 'autumn_r')
结果如图5所示:

▲图5 数据栅格化的结果
对于一个正式的数据可视化图来说,我们还需要添加底图、色条、指北针和比例尺。TransBigData也提供了相应的功能,代码如下:
import matplotlib.pyplot as plt
fig =plt.figure(1,(8,8),dpi=300)
ax =plt.subplot(111)
plt.sca(ax)
# 添加行政区划边界作为底图
sz.plot(ax=ax,edgecolor=(0,0,0,0),facecolor=(0,0,0,0.1),linewidths=0.5)
# 定义色条位置
cax = plt.axes([0.04, 0.33, 0.02, 0.3])
plt.title('Data count')
plt.sca(ax)
# 绘制数据
grid_agg.plot(column = 'VehicleNum',cmap = 'autumn_r',ax = ax,cax = cax,legend = True)
# 添加指北针和比例尺
tbd.plotscale(ax,bounds = bounds,textsize = 10,compasssize = 1,accuracy = 2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()结果如图6所示:

▲图6 tbd包绘制的出租车GPS数据分布
4、订单起讫点OD提取与聚合集计
针对出租车GPS数据,TransBigData提供了直接从数据中提取出出租车订单起讫点(OD)信息的方法,代码如下:
# 从GPS数据提取OD oddat=tbd.taxigps_to_od(data,col=['VehicleNum','time','Lng','Lat','OpenStatus']) oddata
结果如图7所示:

▲图7 tbd包提取的出租车OD
TransBigData包提供的栅格化方法可以让我们快速地进行栅格化定义,只需要修改accuracy参数,即可快速定义不同大小粒度的栅格。我们重新定义一个2km*2km的栅格坐标系,将其参数传入tbd.odagg_grid方法对OD进行栅格化聚合集计并生成GeoDataFrame:
# 重新定义栅格,获取栅格化参数 params=tbd.area_to_params(bounds,accuracy = 2000) # 栅格化OD并集计 od_gdf=tbd.odagg_grid(oddata,params) od_gdf.plot(column = 'count')
结果如图8所示:

▲图8 tbd集计的栅格OD
添加地图底图,色条与比例尺指北针:
# 创建图框
import matplotlib.pyplot as plt
fig =plt.figure(1,(8,8),dpi=300)
ax =plt.subplot(111)
plt.sca(ax)
# 添加行政区划边界作为底图
sz.plot(ax=ax,edgecolor=(0,0,0,1),facecolor=(0,0,0,0),linewidths=0.5)
# 绘制colorbar
cax=plt.axes([0.05, 0.33, 0.02, 0.3])
plt.title('Data count')
plt.sca(ax)
# 绘制OD
od_gdf.plot(ax = ax,column = 'count',cmap = 'Blues_r',linewidth = 0.5,vmax = 10,cax = cax,legend = True)
# 添加比例尺和指北针
tbd.plotscale(ax,bounds=bounds,textsize=10,compasssize=1,accuracy=2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()结果如图9所示:

▲ 图9 TransBigData绘制的栅格OD数据
同时,TransBigData包也提供了将OD直接聚合集计到区域间的方法:
# OD集计到区域 # 方法1:在不传入栅格化参数时,直接用经纬度匹配 od_gdf = tbd.odagg_shape(oddata,sz,round_accuracy=6) # 方法2:传入栅格化参数时,程序会先栅格化后匹配以加快运算速度,数据量大时建议使用 od_gdf = tbd.odagg_shape(oddata,sz,params = params) od_gdf.plot(column = 'count')
结果如图10所示:
▲图10 tbd集计的小区OD
加载地图底图并调整出图参数:
# 创建图框
import matplotlib.pyplot as plt
import plot_map
fig =plt.figure(1,(8,8),dpi=300)
ax =plt.subplot(111)
plt.sca(ax)
# 添加行政区划边界作为底图
sz.plot(ax = ax,edgecolor = (0,0,0,0),facecolor = (0,0,0,0.2),linewidths=0.5)
# 绘制colorbar
cax = plt.axes([0.05, 0.33, 0.02, 0.3])
plt.title('count')
plt.sca(ax)
# 绘制OD
od_gdf.plot(ax = ax,vmax = 100,column = 'count',cax = cax,cmap = 'autumn_r',linewidth = 1,legend = True)
# 添加比例尺和指北针
tbd.plotscale(ax,bounds = bounds,textsize = 10,compasssize = 1,accuracy = 2000,rect = [0.06,0.03],zorder = 10)
plt.axis('off')
plt.xlim(bounds[0],bounds[2])
plt.ylim(bounds[1],bounds[3])
plt.show()结果如图11所示:

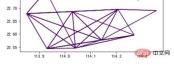
▲ 图11区域间OD可视化结果
5、交互可视化
在TransBigData中,我们可以对出租车数据使用简单的代码在jupyter notebook中快速进行交互可视化。这些可视化方法底层依托了keplergl包,可视化的结果不再是静态的图片,而是能够与鼠标响应交互的地图应用。
tbd.visualization_data方法可以实现数据分布的可视化,将数据传入该方法后,TransBigData会首先对数据点进行栅格集计,然后生成数据的栅格,并将数据量映射至颜色上。代码如下:
结果如图12所示:
# 可视化数据点分布 tbd.visualization_data(data,col = ['lon','lat'],accuracy=1000,height = 500)
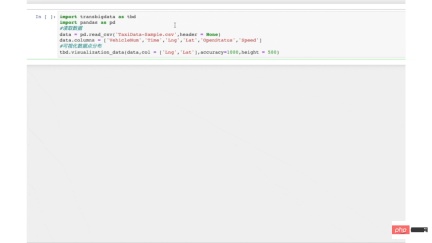
▲ 图12数据分布的栅格可视化
对于出租车数据中所提取出的出行OD,也可使用tbd.visualization_od方法实现OD的弧线可视化。该方法也会对OD数据进行栅格聚合集计,生成OD弧线,并将不同大小的OD出行量映射至不同颜色。代码如下:
# 可视化数据点分布 tbd.visualization_od(oddata,accuracy=2000,height = 500)
结果如图13所示:

▲ 图13 OD分布的弧线可视化
对个体级的连续追踪数据,tbd.visualization_trip方法可以将数据点处理为带有时间戳的轨迹信息并动态地展示,代码如下:
# 动态可视化轨迹 tbd.visualization_trip(data,col = ['lon','lat','VehicleNum','time'],height = 500)
结果图14所示。点击其中的播放键,可以看到出租车运行的动态轨迹效果。
위 내용은 멋지네요. Python이 교통 데이터 시각화를 실현합니다!의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

 Python 학습 : 2 시간의 일일 연구가 충분합니까?Apr 18, 2025 am 12:22 AM
Python 학습 : 2 시간의 일일 연구가 충분합니까?Apr 18, 2025 am 12:22 AM하루에 2 시간 동안 파이썬을 배우는 것으로 충분합니까? 목표와 학습 방법에 따라 다릅니다. 1) 명확한 학습 계획을 개발, 2) 적절한 학습 자원 및 방법을 선택하고 3) 실습 연습 및 검토 및 통합 연습 및 검토 및 통합,이 기간 동안 Python의 기본 지식과 고급 기능을 점차적으로 마스터 할 수 있습니다.
 웹 개발을위한 파이썬 : 주요 응용 프로그램Apr 18, 2025 am 12:20 AM
웹 개발을위한 파이썬 : 주요 응용 프로그램Apr 18, 2025 am 12:20 AM웹 개발에서 Python의 주요 응용 프로그램에는 Django 및 Flask 프레임 워크 사용, API 개발, 데이터 분석 및 시각화, 머신 러닝 및 AI 및 성능 최적화가 포함됩니다. 1. Django 및 Flask 프레임 워크 : Django는 복잡한 응용 분야의 빠른 개발에 적합하며 플라스크는 소형 또는 고도로 맞춤형 프로젝트에 적합합니다. 2. API 개발 : Flask 또는 DjangorestFramework를 사용하여 RESTFULAPI를 구축하십시오. 3. 데이터 분석 및 시각화 : Python을 사용하여 데이터를 처리하고 웹 인터페이스를 통해 표시합니다. 4. 머신 러닝 및 AI : 파이썬은 지능형 웹 애플리케이션을 구축하는 데 사용됩니다. 5. 성능 최적화 : 비동기 프로그래밍, 캐싱 및 코드를 통해 최적화
 Python vs. C : 성능과 효율성 탐색Apr 18, 2025 am 12:20 AM
Python vs. C : 성능과 효율성 탐색Apr 18, 2025 am 12:20 AMPython은 개발 효율에서 C보다 낫지 만 C는 실행 성능이 높습니다. 1. Python의 간결한 구문 및 풍부한 라이브러리는 개발 효율성을 향상시킵니다. 2.C의 컴파일 유형 특성 및 하드웨어 제어는 실행 성능을 향상시킵니다. 선택할 때는 프로젝트 요구에 따라 개발 속도 및 실행 효율성을 평가해야합니다.
 Python in Action : 실제 예제Apr 18, 2025 am 12:18 AM
Python in Action : 실제 예제Apr 18, 2025 am 12:18 AMPython의 실제 응용 프로그램에는 데이터 분석, 웹 개발, 인공 지능 및 자동화가 포함됩니다. 1) 데이터 분석에서 Python은 Pandas 및 Matplotlib를 사용하여 데이터를 처리하고 시각화합니다. 2) 웹 개발에서 Django 및 Flask 프레임 워크는 웹 응용 프로그램 생성을 단순화합니다. 3) 인공 지능 분야에서 Tensorflow와 Pytorch는 모델을 구축하고 훈련시키는 데 사용됩니다. 4) 자동화 측면에서 파이썬 스크립트는 파일 복사와 같은 작업에 사용할 수 있습니다.
 Python의 주요 용도 : 포괄적 인 개요Apr 18, 2025 am 12:18 AM
Python의 주요 용도 : 포괄적 인 개요Apr 18, 2025 am 12:18 AMPython은 데이터 과학, 웹 개발 및 자동화 스크립팅 필드에 널리 사용됩니다. 1) 데이터 과학에서 Python은 Numpy 및 Pandas와 같은 라이브러리를 통해 데이터 처리 및 분석을 단순화합니다. 2) 웹 개발에서 Django 및 Flask 프레임 워크를 통해 개발자는 응용 프로그램을 신속하게 구축 할 수 있습니다. 3) 자동 스크립트에서 Python의 단순성과 표준 라이브러리가 이상적입니다.
 파이썬의 주요 목적 : 유연성과 사용 편의성Apr 17, 2025 am 12:14 AM
파이썬의 주요 목적 : 유연성과 사용 편의성Apr 17, 2025 am 12:14 AMPython의 유연성은 다중 파리가 지원 및 동적 유형 시스템에 반영되며, 사용 편의성은 간단한 구문 및 풍부한 표준 라이브러리에서 나옵니다. 유연성 : 객체 지향, 기능 및 절차 프로그래밍을 지원하며 동적 유형 시스템은 개발 효율성을 향상시킵니다. 2. 사용 편의성 : 문법은 자연 언어에 가깝고 표준 라이브러리는 광범위한 기능을 다루며 개발 프로세스를 단순화합니다.
 파이썬 : 다목적 프로그래밍의 힘Apr 17, 2025 am 12:09 AM
파이썬 : 다목적 프로그래밍의 힘Apr 17, 2025 am 12:09 AMPython은 초보자부터 고급 개발자에 이르기까지 모든 요구에 적합한 단순성과 힘에 호의적입니다. 다목적 성은 다음과 같이 반영됩니다. 1) 배우고 사용하기 쉽고 간단한 구문; 2) Numpy, Pandas 등과 같은 풍부한 라이브러리 및 프레임 워크; 3) 다양한 운영 체제에서 실행할 수있는 크로스 플랫폼 지원; 4) 작업 효율성을 향상시키기위한 스크립팅 및 자동화 작업에 적합합니다.
 하루 2 시간 안에 파이썬 학습 : 실용 가이드Apr 17, 2025 am 12:05 AM
하루 2 시간 안에 파이썬 학습 : 실용 가이드Apr 17, 2025 am 12:05 AM예, 하루에 2 시간 후에 파이썬을 배우십시오. 1. 합리적인 학습 계획 개발, 2. 올바른 학습 자원을 선택하십시오. 3. 실습을 통해 학습 된 지식을 통합하십시오. 이 단계는 짧은 시간 안에 Python을 마스터하는 데 도움이 될 수 있습니다.


핫 AI 도구

Undresser.AI Undress
사실적인 누드 사진을 만들기 위한 AI 기반 앱

AI Clothes Remover
사진에서 옷을 제거하는 온라인 AI 도구입니다.

Undress AI Tool
무료로 이미지를 벗다

Clothoff.io
AI 옷 제거제

AI Hentai Generator
AI Hentai를 무료로 생성하십시오.

인기 기사
뜨거운 도구

PhpStorm 맥 버전
최신(2018.2.1) 전문 PHP 통합 개발 도구

Eclipse용 SAP NetWeaver 서버 어댑터
Eclipse를 SAP NetWeaver 애플리케이션 서버와 통합합니다.

SublimeText3 영어 버전
권장 사항: Win 버전, 코드 프롬프트 지원!

Atom Editor Mac 버전 다운로드
가장 인기 있는 오픈 소스 편집기

Dreamweaver Mac版
시각적 웹 개발 도구

