
ROS 2를 사용하여 로봇의 하드웨어 가속을 단순화하는 방법

- 王林앞으로
- 2023-04-09 16:01:111294검색
번역가 | Li Rui
리뷰어 | Sun Shujuan
로봇을 개발할 때 시스템 통합이 최종 애플리케이션 개발보다 더 중요한 프로젝트 리소스의 대부분을 차지하는 경우가 많습니다. 보급형 산업용 협동로봇이 등장하면서 기존 하드웨어에서 동작하는 소프트웨어 개발에만 전념하는 소프트웨어 개발자들이 생겨났다. 그러나 로봇의 하드웨어와 소프트웨어 기능 사이에는 중요한 관계가 있습니다. 보다 전문적이고 에너지 효율적이며 안전한 고성능 로봇을 만들기 위해서는 컴퓨팅 하드웨어에 대한 설계 제어를 유지해야 합니다.

하드웨어 과제 및 소프트웨어 기술
로봇공학자가 미래에 요구되는 더 우수하고 빠른 로봇을 제공하려면 극복해야 할 하드웨어 장애물이 있습니다. 무어 이후 컴퓨팅 세계에서는 최신 세대의 마이크로프로세서를 채택하기 위해 하드웨어를 업그레이드해도 원하는 애플리케이션 성능 업그레이드가 제공되지 않습니다. 앞으로 나아갈 길은 더 이상 최신 칩을 기다리는 데 있지 않습니다. 하드웨어 가속은 필요한 이득을 얻는 유일한 방법인 경우가 많습니다.
이 하드웨어 문제는 종종 소프트웨어 개발에 편향된 기술을 사용하는 로봇 공학과 같은 분야의 개발자 작업을 복잡하게 만듭니다. 이는 새로운 산업용 로봇에 대한 시장 수요를 충족하려면 적응형 컴퓨팅 하드웨어를 설계해야 한다는 전망에 직면해야 함을 의미합니다. 생산 라인 및 창고와 같은 영역에서 생산성을 높이기 위해 로봇을 사용하는 기업은 추가적인 유연성, 정밀한 위치 제어, 뛰어난 비전 기반 기능, 향상된 데이터 캡처 및 낮은 전력 소비를 제공하는 장치를 찾고 있습니다.
로봇 하드웨어 가속의 주요 원칙은 기존의 제어 중심 접근 방식과 달리 소프트웨어 개발에 대한 하이브리드 제어 및 데이터 중심 접근 방식을 통해 팀이 최적의 양의 하드웨어 리소스를 애플리케이션에 할당하는 맞춤형 컴퓨팅 아키텍처를 설계할 수 있다는 것입니다.
구현 측면에서는 이기종 컴퓨팅 모델이 필요합니다. 이는 제어 흐름 계산에 탁월한 CPU와 GPU를 활용하는 동시에 데이터 흐름 계산을 처리하기 위해 FPGA의 장점을 활용합니다. 이 접근 방식은 CPU/GPU에 대한 유연성과 완전한 제어를 모두 제공하여 낮은 전력 소비, 고성능, 짧은 대기 시간 및 하드웨어 가속 결정성을 갖춘 복잡한 계산을 구현합니다. 현재 다양한 공급업체에서는 이 하이브리드 컴퓨팅 모델의 이점을 제공하는 AMD-Xilinx Kria™ SOM 및 관련 Kria 로봇 스택과 같은 적응형 SoC(시스템 온 칩) 및 SOM(시스템 온 모듈) 장치를 제공하고 있습니다. 이 표에서는 이러한 다양한 모델을 비교합니다.
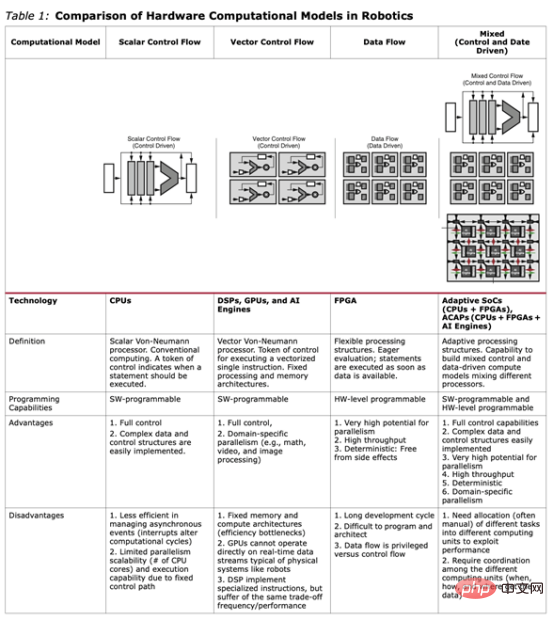
적응형 SoC(시스템 온 칩) 및 SOM(시스템 수준 모듈)을 통해 로봇 전문가는 올바른 데이터 경로 및 제어 메커니즘을 생성하는 아키텍처를 프로그래밍하여 기계 동작을 구축할 수 있습니다. 그러나 확립된 도구와 기술을 사용하여 이러한 아키텍처를 프로그래밍하려면 정교한 엔지니어링 기술이 필요합니다.
로봇공학자는 적절한 하드웨어 및 임베디드 설계 전문 지식이 부족하며 현재 로봇 작업을 해결하기 위해 계산 그래프 형태로 동작을 구축하는 데 익숙합니다. 그들은 종종 C++를 사용하여 고급 소프트웨어 엔지니어링 실습을 통해 복잡한 실시간 결정론적 시스템을 만듭니다.
로봇 운영 체제(ROS) 기반
로봇공학자가 사용 가능한 하드웨어 가속 기술을 활용하려면 이제 다른 접근 방식이 필요합니다. 이상적으로는 이 접근 방식을 통해 익숙한 개발 환경(예: ROS)에서 사용자 정의 하드웨어를 만들고 친숙한 도구(예: Gazebo)를 사용하여 시뮬레이션할 수 있어야 합니다.
ROS는 로봇 공학 애플리케이션 개발을 위한 사실상의 산업 표준이며, 2020년 ROS2가 도입된 이후 더욱 그렇습니다. 이는 현재 ROS와 Gazebo를 사용하는 많은 그룹에서 산업 전반의 로봇 공학 애플리케이션을 위한 기본 소프트웨어 개발 키트(SDK)가 되었습니다.
적응형 컴퓨팅을 ROS에 통합하려는 이전 이니셔티브에서는 하드웨어 엔지니어의 관점에서 이러한 문제를 해결했습니다. 이들은 사용자가 임베디드 및 하드웨어 흐름에 대한 이전 경험이 있으므로 RTL, HDL 및 HLS와 같은 개념과 이를 작동하는 데 사용되는 설계 도구에 익숙하다고 가정합니다. 마찬가지로, 임베디드 대상에 배포하려면 Yocto, OpenEmbedded 및 관련 도구에 대한 이해가 필요합니다.
대부분의 로봇 공학 전문가가 이러한 배경을 갖고 있지 않다는 점을 이해하고 ROS2 하드웨어 가속 워킹 그룹(HAWG)은 임베디드 프로세스를 ROS 생태계에 직접 통합하기 위해 ROS 중심 접근 방식을 취하고 있습니다. 데스크톱 워크스테이션에서 ROS 작업 공간을 구축할 때 로봇공학자가 즐기는 것과 유사한 경험을 제공하는 것을 목표로 합니다.
HAWG의 작업은 적응형 계산을 활용하기 위해 ROS 계산 그래프를 최적화하는 방법에 대한 발표된 연구와 프로그래밍 가능한 논리에서 그래프의 일부를 가속화하기 위한 도구 및 방법에 대한 권장 사항을 기반으로 합니다. 그 외에도 HAWG는 이제 C++ 및 OpenCL과 같은 친숙한 언어에 초점을 맞춘 아키텍처(아래 그림)를 제안하고 있습니다.
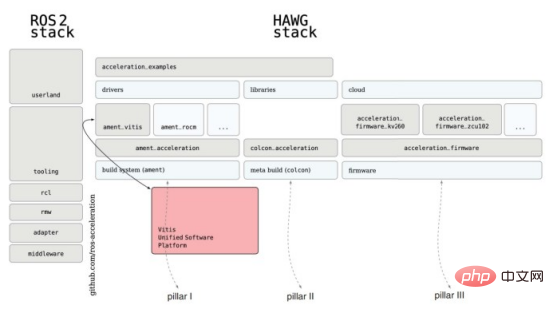
ROS 2 및 HAWG 스택을 함께 사용하면 하드웨어 가속이 가능합니다.
제안된 아키텍처는 플랫폼에 구애받지 않으므로 엣지 시설, 워크스테이션, 데이터 센터 또는 클라우드 컴퓨팅 플랫폼에 적합하며 기술에 구애받지 않아 FPGA, CPU 및 GPU는 물론 Easy 다양한 모듈과 마더보드에 포팅할 수 있습니다.
궁극적으로 이 작업을 통해 대부분의 로봇 전문가는 하드웨어 가속의 기회를 활용하여 차세대 고급 및 복잡한 로봇을 구현할 수 있습니다.
원제: ROS 2로 로봇용 하드웨어 가속 단순화, 작성자: Ben Dickson
위 내용은 ROS 2를 사용하여 로봇의 하드웨어 가속을 단순화하는 방법의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!