



カメラやライダーのキャリブレーションは多くの作業において重要な基礎作業であり、キャリブレーションの精度はその後のソリューションフュージョンの効果の上限に直接影響します。多くの自動運転およびロボット企業は、キャリブレーションの精度を継続的に向上させるために多くの人的資源と物的リソースを投資しています。今日は、一般的なカメラとライダーのキャリブレーション ツールボックスをいくつか紹介します。これらを収集することをお勧めします。
1.Libcbdetect
ワンショットでの複数のチェッカーボード検出: https://www.cvlibs.net/software/libcbdetect/
MATLAB を使用します。このアルゴリズムは、角の点を自動的に抽出し、サブピクセルの精度で長方形の市松模様のようなパターンに結合するように作成されました。このアルゴリズムには、さまざまな種類の画像 (ピンホール カメラ、魚眼カメラ、パノラマ カメラなど) を処理する機能があります。

2.Autoware キャリブレーション パッケージ
Autoware フレームワーク LIDAR カメラ キャリブレーション ツール キット。
リンク: https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator

#3. 3D-3D マッチングに基づくターゲット キャリブレーション
3D-3D 点対応に基づく LiDAR カメラ キャリブレーション、ROS パッケージ、論文「3D-3D 点対応を使用した LiDAR-カメラ キャリブレーション」より!
リンク: https://github.com/ankitdhall/lidar_camera_calibration

4.上海 AI ラボ OpenCalib
上海人工知能研究所が開発した OpenCalib は、センサー キャリブレーション ツールボックスを提供します。このツールボックスは、IMU、LIDAR、カメラ、レーダーなどのセンサーの校正に使用できます。
リンク: https://github.com/PJLab-ADG/SensorsCalibration


##5. Apolloキャリブレーション ツール
Apollo キャリブレーション ツールボックス、リンク: https://github.com/ApolloAuto/apollo/tree/master/modules/calibration6.Livox -cameraキャリブレーション ツール
このソリューションは、Livox レーダーとカメラの間の外部パラメータを手動でキャリブレーションする方法を提供し、Mid-40、Horizon、および Tele-15 で検証されています。これには、カメラの内部パラメータの計算、校正データの取得、外部パラメータの計算の最適化、およびレーダー カメラ フュージョン アプリケーションに関連するコードが含まれています。このソリューションでは、校正プレートの隅の点が校正ターゲットとして使用され、Livox レーダーの非反復走査特性により、点群の密度が比較的高く、正確な位置を見つけることが容易になります。レーダー点群のコーナーポイント。カメラレーダーのキャリブレーションと融合も良い結果をもたらす可能性があります。 リンク: https://github.com/Livox-SDK/livox_camera_lidar_calibration中国語ドキュメント: https://github.com/Livox-SDK/livox_camera_lidar_calibration/blob/master/doc_resources/ README_cn.md
7.CalibrationTools
CalibrationTools は、LIDAR-LIDAR、LIDAR カメラ、その他のセンサー ペア用のキャリブレーション ツールを提供します。これに加えて、次の機能も提供されます。
1) 測位 - バイアス推定ツールは、測位パフォーマンスを向上させるために推測航法 (IMU およびオドメトリ) に使用されるセンサーのパラメーターを推定します。
2) Autoware 制御出力の視覚化および分析ツール;
3) 車両コマンド遅延を修正するためのキャリブレーション ツール;
リンク: https://github.com /tier4 /CalibrationTools

##8.Matlab
Matlab 独自のツールボックスは、LIDAR とカメラのキャリブレーションをサポートしています。リンク:https://ww2.mathworks。 cn/help/lidar/ug/lidar-and-camera-calibration.html
9.ROS キャリブレーション ツール
ROSカメラ LIDAR キャリブレーション パッケージ、リンク: https://github.com/heethesh/lidar_camera_calibration
#10.直接視覚的な LIDAR キャリブレーション
このパッケージは、LIDAR カメラ キャリブレーション用のツールボックスを提供します:ユニバーサル: 回転および非反復スキャン LIDAR、ピンホール、魚眼、全方向投影カメラを含む、さまざまな LIDAR およびカメラ投影モデルを処理できます。 。 ターゲットなし: キャリブレーション ターゲットは必要ありませんが、キャリブレーションに環境構造とテクスチャを使用します。 シングルショット: キャリブレーションには、少なくとも 1 組の LIDAR 点群とカメラ画像が必要です。オプションで、精度を向上させるために複数の LIDAR カメラ データ ペアを使用できます。 自動: キャリブレーション プロセスは自動であり、最初に推測する必要はありません。 正確かつ堅牢: ピクセルレベルの直接 LIDAR カメラ登録アルゴリズムを使用します。これは、エッジベースの間接 LIDAR カメラ登録と比較して、より堅牢で正確です。
リンク: https://github.com/koide3/direct_visual_lidar_calibration11.2D lidar-camera ツールボックス
これは ROS ベースのシングルです-ラインレーザーとカメラの外部パラメータの自動校正コード。キャリブレーション原理は下図に示すとおりで、カメラはQRコードを介してカメラ座標系におけるキャリブレーションプレート平面の平面方程式を推定し、レーザー点群がその平面上に落ちてくるため、点群は外部パラメータに変換されます。カメラ座標系では、構築された点から平面までの距離が誤差として使用され、非線形最小二乗法を使用して解決されます。 リンク: https://github.com/MegviiRobot/CamLaserCalibraTool
以上がカメラとライダーはどのように調整されますか?業界のすべての主流の校正ツールの概要の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 オンライン学習とパッシブアグレッシブアルゴリズムのガイドApr 13, 2025 am 11:09 AM
オンライン学習とパッシブアグレッシブアルゴリズムのガイドApr 13, 2025 am 11:09 AM導入 データは、ソーシャルメディア、金融取引、eコマースプラットフォームなどのソースから前例のないレートで生成されています。この連続的な情報ストリームを処理することは課題ですが、
 Openaiを使用した3つの実験的な実験' s O1を確認する必要があります-AnalyticsVidhyaApr 13, 2025 am 11:06 AM
Openaiを使用した3つの実験的な実験' s O1を確認する必要があります-AnalyticsVidhyaApr 13, 2025 am 11:06 AM導入 あなたが話す前に、あなたはどれくらいの頻度で本当に考え、推論しますか?現在の最先端のLLMであるGPT-4Oは、多くの時間をかけて応答することなく、すでに印象的な反応を提供していました。しかし、それが取られ始めたら想像してみてください
 Openai O1にアクセスする方法は? - 分析VidhyaApr 13, 2025 am 11:05 AM
Openai O1にアクセスする方法は? - 分析VidhyaApr 13, 2025 am 11:05 AM導入 ストロベリーは市場に出ています!!!他のOpenaiの最新モデルによってもたらされた人工知能の最近の進歩と同じくらい実り多いものになることを願っています。 私たちは長い間GPT-5を待っていました
 LlamainDexを使用したマルチドキュメントエージェントRAGの構築Apr 13, 2025 am 11:03 AM
LlamainDexを使用したマルチドキュメントエージェントRAGの構築Apr 13, 2025 am 11:03 AM導入 人工知能の急速に進化する分野では、膨大な量の情報を処理および理解する能力がますます重要になっています。マルチドキュメントエージェントラグ - 強力なアプリを入力します
 SQLを無料で学習するYouTubeチャネル - 分析VidhyaApr 13, 2025 am 10:46 AM
SQLを無料で学習するYouTubeチャネル - 分析VidhyaApr 13, 2025 am 10:46 AM導入 SQL(構造化されたクエリ言語)のマスタリングは、データ管理、データ分析、およびデータベース管理を追求する個人にとって重要です。あなたが初心者として始めている場合、または改善を求めているベテランのプロである場合、
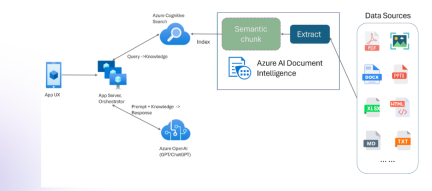 マルチモダリティとAzure Document Intelligenceを備えたRAGApr 13, 2025 am 10:38 AM
マルチモダリティとAzure Document Intelligenceを備えたRAGApr 13, 2025 am 10:38 AM導入 データに基づいて動作する現在の世界では、リレーショナルAIグラフ(RAG)は、データを相関させ、関係をマッピングすることにより、業界に多くの影響を及ぼします。しかし、もう少しもっと行くことができたらどうでしょう
 生成AIの時代の責任AIApr 13, 2025 am 10:28 AM
生成AIの時代の責任AIApr 13, 2025 am 10:28 AM導入 私たちは今、人工知能の時代に住んでおり、私たちの周りのすべてがその日まで賢くなっています。最先端の大手言語モデル(LLMS)およびAIエージェントは、複雑なタスクを実行することができます
 GPT-4o vs Openai O1:新しいOpenaiモデルは誇大広告に値しますか?Apr 13, 2025 am 10:18 AM
GPT-4o vs Openai O1:新しいOpenaiモデルは誇大広告に値しますか?Apr 13, 2025 am 10:18 AM導入 Openaiは、待望の「Strawberry」アーキテクチャに基づいて新しいモデルをリリースしました。 O1として知られるこの革新的なモデルは、推論能力を強化し、問題を通じて考えられるようになりました


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

MinGW - Minimalist GNU for Windows
このプロジェクトは osdn.net/projects/mingw に移行中です。引き続きそこでフォローしていただけます。 MinGW: GNU Compiler Collection (GCC) のネイティブ Windows ポートであり、ネイティブ Windows アプリケーションを構築するための自由に配布可能なインポート ライブラリとヘッダー ファイルであり、C99 機能をサポートする MSVC ランタイムの拡張機能が含まれています。すべての MinGW ソフトウェアは 64 ビット Windows プラットフォームで実行できます。

MantisBT
Mantis は、製品の欠陥追跡を支援するために設計された、導入が簡単な Web ベースの欠陥追跡ツールです。 PHP、MySQL、Web サーバーが必要です。デモおよびホスティング サービスをチェックしてください。

Safe Exam Browser
Safe Exam Browser は、オンライン試験を安全に受験するための安全なブラウザ環境です。このソフトウェアは、あらゆるコンピュータを安全なワークステーションに変えます。あらゆるユーティリティへのアクセスを制御し、学生が無許可のリソースを使用するのを防ぎます。

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

Dreamweaver Mac版
ビジュアル Web 開発ツール

