
ホームページ >テクノロジー周辺機器 >AI >Haomo Cam4DOcc が CVPR2024 に選ばれました: 4D ネットワーク予測にカメラのみを使用し、自動運転に空間と時間を予測する機能を提供します
Haomo Cam4DOcc が CVPR2024 に選ばれました: 4D ネットワーク予測にカメラのみを使用し、自動運転に空間と時間を予測する機能を提供します

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2024-03-07 14:19:021168ブラウズ
2024 年 2 月 27 日、HaoMo Zhixing 人工知能テクノロジー チームが提出した論文「Cam4DOcc: 自動運転アプリケーションにおけるカメラのみの 4D 占有予測のベンチマーク」が、トップ国際会議 CVPR 2024 に無事選出されました。
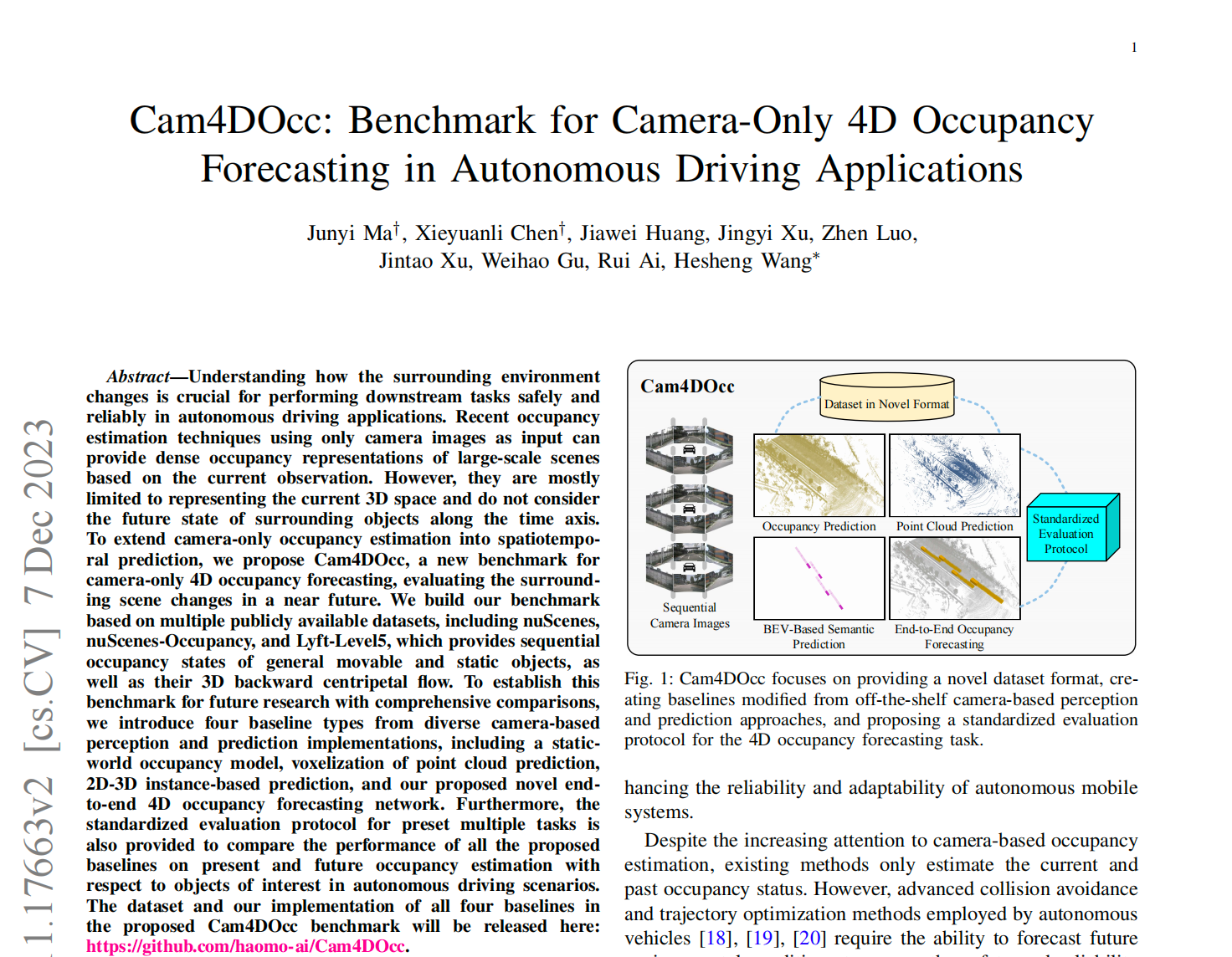
Cam4DOcc は、Hao Mo によって提案された新しいベンチマークで、4D 占有グリッド予測にカメラを使用します。この方法は、近い将来の周囲のシーンの変化を評価し、カメラ占有グリッド推定を時空間予測に拡張できます。このようにして、自動運転システムの周囲環境の動的な変化を認識し、予測する能力が向上しました。
まず、Hao Mo は、いくつかの公開されているデータ セットに基づいて新しい形式のデータ セットを作成し、さらに Cam4DOcc ベンチマークの基本的なリファレンスを提供する標準化された評価プロトコルと 4 つのベースライン タイプを提案しました。次に、Haimo は、エンドツーエンドの方法で将来の占有状況を推定するための、初のカメラベースの 4D 占有予測ネットワーク OCFNet を提案しました。最後に、Haomo は Cam4DOcc ベンチマークに基づいて 4 つの異なるタスクを含む複数の実験を実施し、提案されたベースラインと OCFNet を包括的に評価しました。実験結果は、OCFNet がすべてのベースラインを上回り、トレーニング データが限られている場合でも、合理的な将来の占有率を生み出すことを示しています。 Haomo は、4 つの異なるタイプのベースラインを比較することで、エンドツーエンドの時空間ネットワークが、カメラのみを使用した占有予測の最も有望な研究方向である可能性があることを示しています。さらに、拡張 GMO アノテーションと追加の 3D 逆放射状フローの使用も、4D 占有予測に有益であることが示されています。

コンピューター ビジョンとパターン認識に関する IEEE カンファレンス (CVPR) は、コンピューター ビジョンとパターン認識の分野における 3 つのトップ カンファレンスの 1 つであり、一流の大学や機関が主催します。ニューカッスル大学、シドニー工科大学、ジョンズ・ホプキンス大学など。 CVPR は非常に厳しい審査基準を設けており、Cam4DOcc 手法を提案した Hao Mo 氏の論文が CVPR2024 に選出され、Hao Mo 氏の技術探査の成果が評価されました。
フェイモは創業以来、常に技術革新を基本とし、業界をリードする多くの技術特許を取得し続け、大型モデルを中心に自動運転技術の開発方向性を率先して打ち出してきました。中国における大規模なコンピューティング能力とビッグデータ。 Haimo がリリースした業界初の自動運転生成モデル DriveGPT、Xuehu・Hairuo は、自動運転システムの開発プロセスに大幅な技術的向上をもたらし、Haimo の自動運転システムの開発は完全に新しいモードに入りました。また、自動車インテリジェンスの開発プロセスも大幅に加速しました。
以上がHaomo Cam4DOcc が CVPR2024 に選ばれました: 4D ネットワーク予測にカメラのみを使用し、自動運転に空間と時間を予測する機能を提供しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。