



#2021 年に種が蒔かれました
BEV 障害物のストーリーを読んだ学生は、私たちのグループが 10 月 21 日の資料の頃に BEV 障害物に取り組み始めたことを知っているはずです。当時は人手がなかったため、BEVの車線標示をやろうとは思いませんでした。しかし、12月頃に候補者と会ったのを覚えています。面接中に、彼らは半年以上前からBEV車線標示に取り組んでいたと聞きました。技術ルート全体が高架道路を介してBEV車線標示ネットワークとして使用されていました。精度の高いマップ。真の値をトレーニングし、効果は悪くないと言えます。残念ながら、その候補者は最終的に私たちのところに来ませんでした。 2021 年の Telsa AI Day で教えられた車線標示の内容と組み合わせることで、BEV 車線標示作成の種がグループに植えられました。2022 年に正しい第一歩を踏み出しましょう
2022 年を通じて、私たちのチームの人員は非常に逼迫していました。6 月と 7 月はちょうど人員が足りたのを覚えています。 BEV 車線を探索します。しかし、当時、私たちのグループには、これを2か月以内に行う必要があるクラスメートは1人だけでした(今ではシャオシュアンと呼びましょう)。そして、2021年の種が芽を出し始めました。私たちはデータから始めるつもりでした。学生のXiaoxuanはまだとても上手でした(非常に想像力が豊かで、Xiaoxuanは将来、みんなを驚かせるようなものをもっと作りました)、そしてそれはほぼ使用されました。 、高速高精度地図を通じて、該当する車両の周囲の車線データを抽出できます。作った時はまだみんなすごく興奮していたのを覚えています。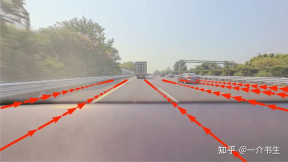
23 年間のつまずき
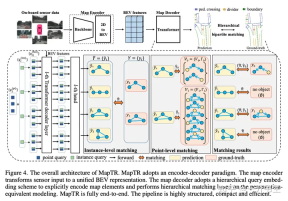
当社の BEV 障害物は、BEV がこの道を進むことができることを証明しており、路上テストでも良好な結果を示しているからです。グループは、車線境界線を検討するためのより多くのリソースを持ち始めました。これは BEV ではないことに注意してください。なぜ?というのも、当時はオンライン化へのプレッシャーが大きく、BEVレーンラインの経験も浅く、つまり2Dレーンラインを量産した人がグループ全体でほとんどいなかったからです。 。 2023 年上半期はまさに「つまずき」と言える状況で、社内で何度も白熱した議論を重ね、最終的に 2 つのラインを形成することを決定し、そのうちの 1 つは 2D レーンラインです。 2Dレーンラインを中心とした後処理、軽量モデル、2Dレーンラインによるレーンライン後処理量産経験の蓄積。 1 つのラインは BEV レーンラインです。人員が少なく (実際には 1 ~ 2 人のみ)、BEV レーンラインのモデル設計に重点を置き、モデルの経験を蓄積しています。 BEV 車線区画線ネットワークは既に数多く存在しますが、私たちに大きな影響を与えた 2 つの論文を参考までに掲載します。 「HDMapNet: オンライン HD マップ構築および評価フレームワーク」および「MapTR: オンライン ベクトル化 HD マップ構築のための構造化モデリングと学習」
しかし、ストーリーには紆余曲折がつきもので、車線データは高速・高精度地図でしか作成できません。市をどうするか? 解決すべき悪質な事件がまだたくさんあります。このとき、いよいよ重要人物が登場しますが、クラスメイトのシャオタン(データグループの重鎮)と呼びましょう。クラスメイトのシャオタンと他の人たちは、点群再構成を使用してクリップを再構築してくれました ( このプロセスは非常に苦痛でした。この 2 か月間が彼らにとって最もストレスの多い時期だったことを覚えています (笑)。もちろん、クラスメートのシャオタンと私たちはよく衝突しました)愛し合って殺し合った。結局のところ、私は会議中に「またデータがない」とよく言います。)。では、再建後のラベルはどうするのかというと、当時のサプライヤーを見てみると、ラベルを貼る経験はおろか、そのようなラベルを貼るツールを持っている会社もありませんでした。 Xiaotang らと協力して、長い 1 か月を経て、サプライヤーとともに注釈ツールが最終的に完成しました。 (私たちは、自動運転アノテーション業界全体に力を与えているとよく冗談を言います。このプロセスは本当に苦痛で、クリップの再構築は読み込みに非常に時間がかかります)。しかし、全体のラベリングはまだ比較的時間がかかるか高価であり、この時点で、Xiaoxuan は車線事前ラベリングの大型モデルでデビューしました (車線事前ラベリングの大型モデルの効果は依然として顕著です)。驚いて彼を見た。この一連の組み合わせにより、ようやく車線データの作成がほぼ完了します。 8月には、BEVレーンライン制御レーンラインが十分に反復され、単純な高速操縦機能に適しています。今もXiaoxuanは大きなモデルの事前にマークされた方向で私たちにさらなる驚きをもたらしてくれます、私たちとXiaotangはまだお互いを愛しています。
しかし、話はそう簡単に終わりません。9 月に、マルチモーダル (ライダー、カメラ、レーダー) マルチタスク (車線、障害物、Occ) 融合前のモデルの開発に着手しました。その後、City Navigation (NCP)、つまり認識を重視し地図を無視するいわゆるソリューションもサポートする予定です。 BEV の障害物と BEV 車線の経験に基づいて、おそらく 9 月末までに車両に統合ネットワークを展開する予定です。道路標識認識、交差点トポロジーなど、多くのサブタスクが車線境界線にも追加されました。このプロセスでは、BEV 車線ラインの後処理をアップグレードし、車線ライン 3 次スプライン フィッティングを放棄し、ポイント トラッキング スキームを採用しました。ポイント トラッキング スキームの出力と車線ライン モデルを簡単に組み合わせることができます。このプロセスも苦痛で、2ヶ月連続で週に1回の臨時ミーティングを開催し、結局フィッティングプランに基づいて順調に進んできましたが、より高い限界に到達するには苦痛と喜びを味わうしかありません。最後に、私たちはすでに基本的な機能を路上テストに導入しています。
図 4 について簡単に説明します。左側は車線のポイント追跡の効果です。現在、モデルの知覚範囲は最初の 80 メートルのみです。後ろにいくつかのポイントがあることがわかります。追跡によって残された車。右側は私たちが確立したリアルタイムの知覚マップです もちろん、まだ急速な反復プロセスの途中であり、まだ多くの問題が解決されています。
24年目の新たな始まり
24年という年月を経て、21年から現在までの成長と蓄積を振り返るこの瞬間、私は本当に幸運でした。 21 年後にその時点に到達するために、私は BEV を行う機会に恵まれ、その過程で互いに助け合える志を同じくする友人のグループがいることが非常に幸運です。 24 年間、融合前のモデルの量産、データ方向の取り組み、タイミング モデルの探求、エンドツーエンドの想像力など、私たちが追求すべきことはたくさんあります。
以上がBEVレーンラインの実装について少しの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Gemma Scope:AI'の思考プロセスを覗くためのGoogle'の顕微鏡Apr 17, 2025 am 11:55 AM
Gemma Scope:AI'の思考プロセスを覗くためのGoogle'の顕微鏡Apr 17, 2025 am 11:55 AMジェマの範囲で言語モデルの内部の仕組みを探る AI言語モデルの複雑さを理解することは、重要な課題です。 包括的なツールキットであるGemma ScopeのGoogleのリリースは、研究者に掘り下げる強力な方法を提供します
 ビジネスインテリジェンスアナリストは誰で、どのようになるか?Apr 17, 2025 am 11:44 AM
ビジネスインテリジェンスアナリストは誰で、どのようになるか?Apr 17, 2025 am 11:44 AMビジネスの成功のロック解除:ビジネスインテリジェンスアナリストになるためのガイド 生データを組織の成長を促進する実用的な洞察に変換することを想像してください。 これはビジネスインテリジェンス(BI)アナリストの力です - GUにおける重要な役割
 SQLに列を追加する方法は? - 分析VidhyaApr 17, 2025 am 11:43 AM
SQLに列を追加する方法は? - 分析VidhyaApr 17, 2025 am 11:43 AMSQLの変更テーブルステートメント:データベースに列を動的に追加する データ管理では、SQLの適応性が重要です。 その場でデータベース構造を調整する必要がありますか? Alter Tableステートメントはあなたの解決策です。このガイドの詳細は、コルを追加します
 ビジネスアナリストとデータアナリストApr 17, 2025 am 11:38 AM
ビジネスアナリストとデータアナリストApr 17, 2025 am 11:38 AM導入 2人の専門家が重要なプロジェクトで協力している賑やかなオフィスを想像してください。 ビジネスアナリストは、会社の目標に焦点を当て、改善の分野を特定し、市場動向との戦略的整合を確保しています。 シム
 ExcelのCountとCountaとは何ですか? - 分析VidhyaApr 17, 2025 am 11:34 AM
ExcelのCountとCountaとは何ですか? - 分析VidhyaApr 17, 2025 am 11:34 AMExcelデータカウントと分析:カウントとカウントの機能の詳細な説明 特に大規模なデータセットを使用する場合、Excelでは、正確なデータカウントと分析が重要です。 Excelは、これを達成するためにさまざまな機能を提供し、CountおよびCounta関数は、さまざまな条件下でセルの数をカウントするための重要なツールです。両方の機能はセルをカウントするために使用されますが、設計ターゲットは異なるデータ型をターゲットにしています。 CountおよびCounta機能の特定の詳細を掘り下げ、独自の機能と違いを強調し、データ分析に適用する方法を学びましょう。 キーポイントの概要 カウントとcouを理解します
 ChromeはAIと一緒にここにいます:毎日何か新しいことを体験してください!!Apr 17, 2025 am 11:29 AM
ChromeはAIと一緒にここにいます:毎日何か新しいことを体験してください!!Apr 17, 2025 am 11:29 AMGoogle Chrome'sAI Revolution:パーソナライズされた効率的なブラウジングエクスペリエンス 人工知能(AI)は私たちの日常生活を急速に変換しており、Google ChromeはWebブラウジングアリーナで料金をリードしています。 この記事では、興奮を探ります
 ai' s Human Side:Wellbeing and the Quadruple bottuntApr 17, 2025 am 11:28 AM
ai' s Human Side:Wellbeing and the Quadruple bottuntApr 17, 2025 am 11:28 AMインパクトの再考:四重材のボトムライン 長い間、会話はAIの影響の狭い見方に支配されており、主に利益の最終ラインに焦点を当てています。ただし、より全体的なアプローチは、BUの相互接続性を認識しています
 5ゲームを変える量子コンピューティングの使用ケースあなたが知っておくべきであるApr 17, 2025 am 11:24 AM
5ゲームを変える量子コンピューティングの使用ケースあなたが知っておくべきであるApr 17, 2025 am 11:24 AM物事はその点に向かって着実に動いています。量子サービスプロバイダーとスタートアップに投資する投資は、業界がその重要性を理解していることを示しています。そして、その価値を示すために、現実世界のユースケースの数が増えています


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

MinGW - Minimalist GNU for Windows
このプロジェクトは osdn.net/projects/mingw に移行中です。引き続きそこでフォローしていただけます。 MinGW: GNU Compiler Collection (GCC) のネイティブ Windows ポートであり、ネイティブ Windows アプリケーションを構築するための自由に配布可能なインポート ライブラリとヘッダー ファイルであり、C99 機能をサポートする MSVC ランタイムの拡張機能が含まれています。すべての MinGW ソフトウェアは 64 ビット Windows プラットフォームで実行できます。

メモ帳++7.3.1
使いやすく無料のコードエディター

WebStorm Mac版
便利なJavaScript開発ツール

Dreamweaver Mac版
ビジュアル Web 開発ツール

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

