
ホームページ >ソフトウェアチュートリアル >コンピューターソフトウェア >Mind+ プログラミングで歩行ロボットを作る方法 - Mind+ プログラミングで歩行ロボットを作る方法
Mind+ プログラミングで歩行ロボットを作る方法 - Mind+ プログラミングで歩行ロボットを作る方法

- 王林転載
- 2024-03-06 10:19:051159ブラウズ
php Editor Bananaは今日、歩行ロボットを簡単に作成できるマインドプログラミングというソフトウェアを紹介します。この記事では、誰でもすぐに始められ、プログラミングの楽しさと達成感を味わえるよう、歩行ロボットを作るマインドプログラミングの具体的な操作方法を詳しく解説します。この面白い世界を一緒に探検しましょう!
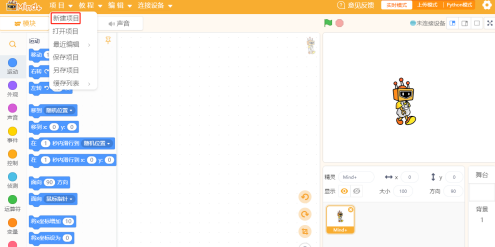
Mindを開き、マウスの左ボタンで[プロジェクト]-[新規プロジェクト]をクリックし、新しいエルフを作成し、エルフ名を[Walking Robot]に変更します。
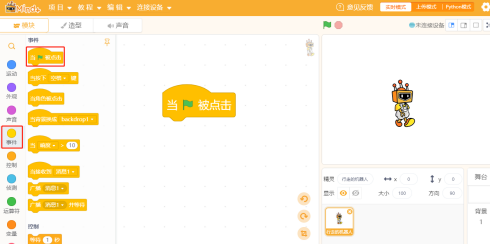
[Event] をクリックし、[Little Green Flag] をプログラミング インターフェイスにドラッグします。
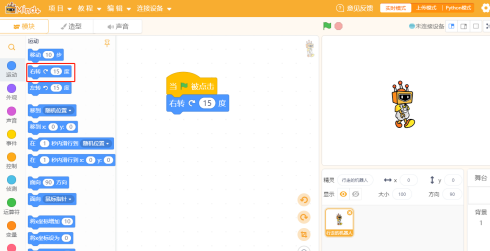
[移動]をクリックし、[小さな緑の旗]の下に[右に(15)度回転]を接続します。
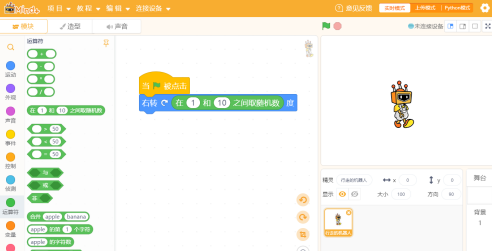
[演算子]をクリックし、[(1)と(10)の間の乱数を取得]をプログラミングインターフェイスにドラッグし、[右に(15)度回す]に挿入します。
[移動]をクリックし、[右に曲がって(1)と(10)の間でランダムな角度を取る]の下に[回転方法を左右反転に設定する]を接続します。

[コントロール]をクリックし、[回転モードを左右反転に設定]の下にある[ループ実行]を接続します。
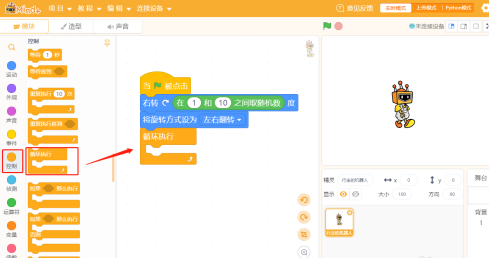
[移動]をクリックし、[ループ実行]内に[移動(10)ステップ]を結合し、[移動(10)ステップ]の下に[エッジに触れたときの反発]を結合します。

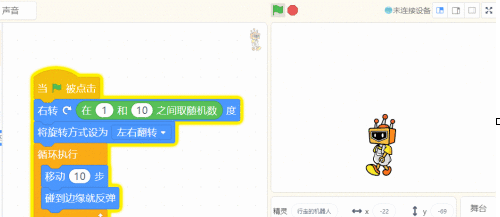
小さな緑色の旗をクリックして実行します。
以上がMind+ プログラミングで歩行ロボットを作る方法 - Mind+ プログラミングで歩行ロボットを作る方法の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。