



CARLA v2 ではエキスパートレベルの習熟度で実行できます。
タイトル: Think2Drive: 準現実的な自動運転のための潜在世界モデルで考えることによる効率的な強化学習 (CARLA-v2 内)
著者の所属: 上海交通大学
現実 世界の自動運転 (AD)、特に都市部での運転には、多くの特殊なケースが含まれます。最近リリースされた AD シミュレーター CARLA v2 は、運転シナリオに 39 の共通イベントを追加し、CARLA v1 よりも現実に近いテスト プラットフォームを提供します。これはコミュニティに新たな課題をもたらします。既存の作業のほとんどは計画のために特定のルールに依存する必要があるため、これまでのところ、CARLA v2 の新しいシナリオでの成功を報告した文献はありませんが、より複雑な状況での CARLA v2 をカバーすることはできません。 。この取り組みでは、プランナーを積極的かつ直接的に育成し、特殊なケースに柔軟かつ効果的に対応できるようにすることを目指しており、これが AD の将来の方向性でもあると考えています。私たちの知る限り、私たちは、環境の遷移を学習するための世界モデルを備えた、Think2Drive という AD 用の最初のモデルベースの強化学習手法を開発しました。この手法は、プランナーをトレーニングするためのニューラル シミュレーターとして機能します。このパラダイムは、ワールド モデルの低次元状態空間とテンソルの並列計算により、トレーニング効率を大幅に向上させます。
その結果、単一の A6000 GPU で 3 日間のトレーニングを行った後、Think2Drive は CARLA v2 でエキスパート レベルの習熟度で実行できました。私たちの知る限り、CARLA v2 での成功はこれまで報告されていません。 (ルートが 100% 完了)。シナリオを通じた運転モデルの評価をサポートするベンチマークである CornerCase-Repository も提案されています。さらに、ルートの完了、違反の数、シーンの密度などのパフォーマンスを評価するための新しいバランスの取れた指標が提案されているため、運転スコアから実際の運転パフォーマンスに関するより多くの情報が得られます。
#実験結果


##最後に書きます
私たちの倉庫へようこそ! BEV、マルチモーダルフュージョン、車両乗員検出、ミリ波レーダー視覚認識、車線検出、3D認識など、多くの技術分野をカバーしています。また、オンライン マップ、マルチセンサー キャリブレーション、Nerf、大規模モデル、計画制御、軌道予測に関するレビューや論文も共有します。私たちのコンテンツを気に入っていただければ幸いです。さらにエキサイティングな情報を得るために、スターを付けたり、倉庫をフォローしたりすることを忘れないでください。ご協力ありがとうございます!以上がThink2Drive: 自動運転のための初のモデルベース RL 手法 (上海交通大学)の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 TFIDFVectorizerを使用して、テキストドキュメントをTF-IDFマトリックスに変換しますApr 18, 2025 am 10:26 AM
TFIDFVectorizerを使用して、テキストドキュメントをTF-IDFマトリックスに変換しますApr 18, 2025 am 10:26 AMこの記事では、テキストデータを分析するための自然言語処理(NLP)の重要なツールである周波数逆文書頻度(TF-IDF)手法について説明します。 TF-IDFは、TEを重み付けすることにより、基本的なワードバッグアプローチの限界を上回ります
 Langchainを使用したスマートAIエージェントの構築:実用的なガイドApr 18, 2025 am 10:18 AM
Langchainを使用したスマートAIエージェントの構築:実用的なガイドApr 18, 2025 am 10:18 AMLangchainでAIエージェントの力を解き放つ:初心者向けガイド 祖母にchatgptとチャットすることで人工知能の不思議を示すことを想像してみてください。 th
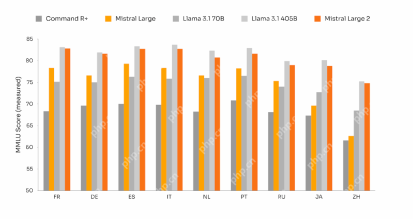 Mistral Large 2:Llama 3.1 405bに挑戦するのに十分強力ですか?Apr 18, 2025 am 10:16 AM
Mistral Large 2:Llama 3.1 405bに挑戦するのに十分強力ですか?Apr 18, 2025 am 10:16 AMミストラル大規模2:ミストラルAIの強力なオープンソースLLMに深く飛び込む メタAIの最近のラマ3.1ファミリーのモデルのリリースに続いて、これまでの最大のモデルのミストラルAIの発表がすぐに続きました。
 安定した拡散のノイズスケジュールとは何ですか? - 分析VidhyaApr 18, 2025 am 10:15 AM
安定した拡散のノイズスケジュールとは何ですか? - 分析VidhyaApr 18, 2025 am 10:15 AM拡散モデルのノイズスケジュールの理解:包括的なガイド AIによって生み出されたデジタルアートの見事なビジュアルに魅了されたことがあり、基礎となるメカニズムについて疑問に思ったことはありますか? 重要な要素は、「ノイズスケジュール、&Quo
 GPT-4Oで会話のチャットボットを構築する方法は? - 分析VidhyaApr 18, 2025 am 10:06 AM
GPT-4Oで会話のチャットボットを構築する方法は? - 分析VidhyaApr 18, 2025 am 10:06 AMGPT-4Oでコンテキストチャットボットを構築する:包括的なガイド AIとNLPの急速に進化する風景では、チャットボットは開発者と組織にとって不可欠なツールになりました。 本当に魅力的でインテリジェントなチャットを作成する重要な側面
 2025年にAIエージェントを構築するためのトップ7フレームワークApr 18, 2025 am 10:00 AM
2025年にAIエージェントを構築するためのトップ7フレームワークApr 18, 2025 am 10:00 AMこの記事では、AIエージェントを構築するための7つの主要なフレームワーク、つまり目標を達成するために知覚、決定、行動する自律的なソフトウェアエンティティについて説明します。 これらのエージェントは、従来の補強学習を上回り、高度な計画と理想を活用します
 タイプIとタイプIIエラーの違いは何ですか? - 分析VidhyaApr 18, 2025 am 09:48 AM
タイプIとタイプIIエラーの違いは何ですか? - 分析VidhyaApr 18, 2025 am 09:48 AM統計的仮説検定におけるタイプIおよびタイプIIエラーの理解 新しい血圧薬をテストする臨床試験を想像してください。 この試験では、この薬は血圧を大幅に低下させると結論付けていますが、実際にはそうではありません。これはタイプです
 Sumy Libraryによる自動テキスト要約Apr 18, 2025 am 09:37 AM
Sumy Libraryによる自動テキスト要約Apr 18, 2025 am 09:37 AMSumy:AIを搭載した要約アシスタント 無限の文書をふるいにかけるのにうんざりしていませんか? 強力なPythonライブラリであるSumyは、自動テキストの要約のための合理化されたソリューションを提供します。 この記事では、Sumyの能力を調べて、あなたを導きます


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

MinGW - Minimalist GNU for Windows
このプロジェクトは osdn.net/projects/mingw に移行中です。引き続きそこでフォローしていただけます。 MinGW: GNU Compiler Collection (GCC) のネイティブ Windows ポートであり、ネイティブ Windows アプリケーションを構築するための自由に配布可能なインポート ライブラリとヘッダー ファイルであり、C99 機能をサポートする MSVC ランタイムの拡張機能が含まれています。すべての MinGW ソフトウェアは 64 ビット Windows プラットフォームで実行できます。

SublimeText3 英語版
推奨: Win バージョン、コードプロンプトをサポート!

SublimeText3 中国語版
中国語版、とても使いやすい

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

PhpStorm Mac バージョン
最新(2018.2.1)のプロフェッショナル向けPHP統合開発ツール

