

CMUÐ は画期的な成果を達成しました。ロボット犬は完全な敏捷性の値を持ち、超高速で障害物を横切ることができ、スピードと安全性の両方を備えています。

CMU とチューリッヒ工科大学のチームは協力して、「Agile But Safe」(ABS) と呼ばれる新しいフレームワークを開発しました。これは、四足ロボットが複雑な環境で高速移動を実現するためのソリューションを提供します。このフレームワークは衝突回避において高い効率を示すだけでなく、前例のない 3.1 ミリ秒の速度も達成します。このイノベーションは、脚式ロボットの分野に新たな進歩をもたらします。
ロボットの高速動作の分野では、速度と安全性を同時に維持することが常に大きな課題となってきました。しかし、カーネギーメロン大学(CMU)とチューリッヒ工科大学(ETH)の研究チームは最近、画期的な発見を達成しました。彼らが開発した新しい四足ロボットのアルゴリズムは、複雑な環境で素早く移動できるだけでなく、障害物を巧みに回避することができ、まさに「機敏性と安全性」という目標を達成します。このアルゴリズムの革新性は、周囲の環境を迅速に特定して分析し、リアルタイムのデータに基づいてインテリジェントな意思決定を行う能力にあります。高度なセンサーと強力なコンピューティング能力を使用することで、ロボットは周囲の障害物を正確に感知し、歩行と軌道を調整して回避することができます。この技術の応用が成功すれば、高速ロボットの開発が大幅に促進されるでしょう。

論文アドレス: https://arxiv.org/pdf/2401.17583.pdf
ABS のサポートにより、ロボット犬はさまざまなシナリオで驚くべき高速障害物回避能力を実証しました。
障害物の多い狭い廊下:

乱雑な屋内シーン:

芝生でも屋外でも、静的障害物でも動的な障害物でも、ロボット犬はそれらを冷静に処理できます:

ベビーカーに遭遇したとき、ロボット犬は機敏に回避します:




ABS ブレークスルー テクノロジー:
RL 学習モデル不要の到達回避値
ABSは、「アジャイルポリシー」(Agile Policy)と「リカバリポリシー」(Recovery Policy)の二重ポリシー(Dual Policy)設定を採用しています。敏捷性戦略により、ロボットは障害物を素早く移動できますが、到達回避値推定が潜在的な危険 (ベビーカーの突然の出現など) を検出すると、回復戦略が介入してロボットの安全を確保します。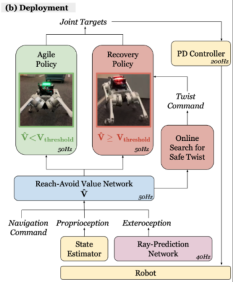

回復戦略の革新は次のとおりです。これにより、四足ロボットがバックアップ保護戦略として線形速度および角速度コマンドを迅速に追跡できるようになります。アジャイル戦略とは異なり、回復戦略の観察空間は線速度と角速度コマンドの追跡に焦点を当てており、外部の感覚情報を必要としません。回復戦略のミッション報酬は、線速度追跡、角速度追跡、生存、敏捷性戦略へのスムーズな切り替えを可能にする姿勢の維持に重点を置いています。この戦略のトレーニングもシミュレーション環境で実行されますが、回復戦略をトリガーする可能性のある条件によりよく適応するために、特定のドメインのランダム化とカリキュラム設定が使用されます。このアプローチにより、四足ロボットは高速動作中の潜在的な故障に迅速に対応できるようになります。
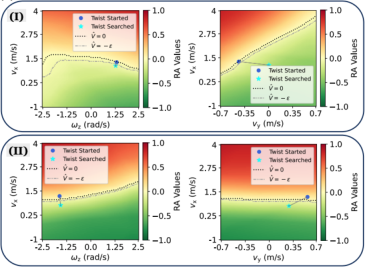
下の図は、2 つの特定の状況 (I および II) で回復戦略がトリガーされたときの RA (防御) 値の状況を視覚的に表したものです。これらの視覚化は、vx (x 軸に沿った速度) 対 ωz (z 軸の周りの角速度) および vx 対 vy (y 軸に沿った速度) 平面で実行されます。図は探索前の初期回転状態(つまり現在のロボットベースの回転状態)と探索により得られたコマンドを示しています。簡単に言うと、これらのグラフは、特定の条件下で回復戦略の探索を通じて得られた最適な動作指示と、これらの指示が RA 値にどのような影響を与えるかを示し、さまざまな動作状態におけるロボットの安全性を反映しています。


以上がCMUÐ は画期的な成果を達成しました。ロボット犬は完全な敏捷性の値を持ち、超高速で障害物を横切ることができ、スピードと安全性の両方を備えています。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 あなたは無知のベールの後ろに職場AIを構築する必要がありますApr 29, 2025 am 11:15 AM
あなたは無知のベールの後ろに職場AIを構築する必要がありますApr 29, 2025 am 11:15 AMジョン・ロールズの独創的な1971年の著書「正義の理論」で、彼は私たちが今日のAIデザインの核となり、意思決定を使用するべきであるという思考実験を提案しました:無知のベール。この哲学は、公平性を理解するための簡単なツールを提供し、リーダーがこの理解を使用してAIを公平に設計および実装するための青写真を提供します。 あなたが新しい社会のルールを作っていると想像してください。しかし、前提があります。この社会でどのような役割を果たすかは事前にわかりません。過半数または限界少数派に属している、金持ちまたは貧弱、健康、または障害者になることがあります。この「無知のベール」の下で活動することで、ルールメーカーが自分自身に利益をもたらす決定を下すことができません。それどころか、人々はより公衆を策定する意欲があります
 決定、決定…実用的な応用AIの次のステップApr 29, 2025 am 11:14 AM
決定、決定…実用的な応用AIの次のステップApr 29, 2025 am 11:14 AMロボットプロセスオートメーション(RPA)を専門とする多くの企業は、繰り返しタスクを自動化するためのボットを提供しています。 一方、プロセスマイニング、オーケストレーション、インテリジェントドキュメント処理スペシャル
 エージェントが来ています - 私たちがAIパートナーの隣ですることについてもっとApr 29, 2025 am 11:13 AM
エージェントが来ています - 私たちがAIパートナーの隣ですることについてもっとApr 29, 2025 am 11:13 AMAIの未来は、単純な単語の予測と会話シミュレーションを超えて動いています。 AIエージェントは出現しており、独立したアクションとタスクの完了が可能です。 このシフトは、AnthropicのClaudeのようなツールですでに明らかです。 AIエージェント:研究a
 共感がAI主導の未来におけるリーダーのコントロールよりも重要である理由Apr 29, 2025 am 11:12 AM
共感がAI主導の未来におけるリーダーのコントロールよりも重要である理由Apr 29, 2025 am 11:12 AM急速な技術の進歩は、仕事の未来に関する将来の見通しの視点を必要とします。 AIが単なる生産性向上を超えて、私たちの社会構造の形成を開始するとどうなりますか? Topher McDougalの今後の本、Gaia Wakes:
 製品分類のためのAI:マシンは税法を習得できますか?Apr 29, 2025 am 11:11 AM
製品分類のためのAI:マシンは税法を習得できますか?Apr 29, 2025 am 11:11 AM多くの場合、Harmonized System(HS)などのシステムからの「HS 8471.30」などの複雑なコードを含む製品分類は、国際貿易と国内販売に不可欠です。 これらのコードは、すべてのINVに影響を与える正しい税申請を保証します
 データセンターの要求は、気候技術のリバウンドを引き起こす可能性がありますか?Apr 29, 2025 am 11:10 AM
データセンターの要求は、気候技術のリバウンドを引き起こす可能性がありますか?Apr 29, 2025 am 11:10 AMデータセンターと気候技術投資におけるエネルギー消費の将来 この記事では、AIが推進するデータセンターのエネルギー消費の急増と気候変動への影響を調査し、この課題に対処するための革新的なソリューションと政策の推奨事項を分析します。 エネルギー需要の課題:大規模で超大規模なデータセンターは、数十万の普通の北米の家族の合計に匹敵する巨大な力を消費し、新たなAIの超大規模なセンターは、これよりも数十倍の力を消費します。 2024年の最初の8か月で、Microsoft、Meta、Google、Amazonは、AIデータセンターの建設と運用に約1,250億米ドルを投資しました(JP Morgan、2024)(表1)。 エネルギー需要の成長は、挑戦と機会の両方です。カナリアメディアによると、迫り来る電気
 AIとハリウッドの次の黄金時代Apr 29, 2025 am 11:09 AM
AIとハリウッドの次の黄金時代Apr 29, 2025 am 11:09 AM生成AIは、映画とテレビの制作に革命をもたらしています。 LumaのRay 2モデル、滑走路のGen-4、OpenaiのSora、GoogleのVEO、その他の新しいモデルは、前例のない速度で生成されたビデオの品質を向上させています。これらのモデルは、複雑な特殊効果と現実的なシーンを簡単に作成できます。短いビデオクリップやカメラ認知モーション効果も達成されています。これらのツールの操作と一貫性を改善する必要がありますが、進歩の速度は驚くべきものです。 生成ビデオは独立した媒体になりつつあります。アニメーション制作が得意なモデルもあれば、実写画像が得意なモデルもあります。 AdobeのFireflyとMoonvalleyのMAであることは注目に値します
 ChatGptはゆっくりとAIの最大のYES-MANになりますか?Apr 29, 2025 am 11:08 AM
ChatGptはゆっくりとAIの最大のYES-MANになりますか?Apr 29, 2025 am 11:08 AMChatGptユーザーエクスペリエンスは低下します:それはモデルの劣化ですか、それともユーザーの期待ですか? 最近、多数のCHATGPT有料ユーザーがパフォーマンスの劣化について不満を述べています。 ユーザーは、モデルへの応答が遅く、答えが短い、助けの欠如、さらに多くの幻覚を報告しました。一部のユーザーは、ソーシャルメディアに不満を表明し、ChatGptは「お世辞になりすぎて」、重要なフィードバックを提供するのではなく、ユーザービューを検証する傾向があることを指摘しています。 これは、ユーザーエクスペリエンスに影響を与えるだけでなく、生産性の低下やコンピューティングリソースの無駄など、企業の顧客に実際の損失をもたらします。 パフォーマンスの劣化の証拠 多くのユーザーは、特にGPT-4などの古いモデル(今月末にサービスから廃止される)で、ChatGPTパフォーマンスの大幅な分解を報告しています。 これ


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター

EditPlus 中国語クラック版
サイズが小さく、構文の強調表示、コード プロンプト機能はサポートされていません

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

Safe Exam Browser
Safe Exam Browser は、オンライン試験を安全に受験するための安全なブラウザ環境です。このソフトウェアは、あらゆるコンピュータを安全なワークステーションに変えます。あらゆるユーティリティへのアクセスを制御し、学生が無許可のリソースを使用するのを防ぎます。

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。
ホットトピック
 7831
7831 15164814140252130025123929
15164814140252130025123929