
ホームページ >テクノロジー周辺機器 >AI >クラウドベースおよび車ベースの MapNeXt がすべて完了しました。次世代オンライン高精度地図の構築
クラウドベースおよび車ベースの MapNeXt がすべて完了しました。次世代オンライン高精度地図の構築

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2024-01-31 18:06:111103ブラウズ
前に書いた&著者の個人的な理解
協調、接続、自動化されたモビリティ (CCAM) では、インテリジェントな運転車両は、周囲の環境を認識し、モデリングし、分析する能力が向上します。意識が高ければ高いほど、複雑な運転シナリオを理解し、意思決定し、安全かつ効率的に実行することができます。高精度 (HD) マップは、センチメートルレベルの精度と車線レベルのセマンティック情報で道路環境を表現し、インテリジェント モビリティ システムの中核コンポーネントであり、CCAM テクノロジーを実現する重要な要素となっています。これらのマップは、自動運転車両が周囲の状況を理解する上で強力な利点を提供します。 HD マップは、物理センサー (マップ)、つまり LIDAR、カメラ、GPS、IMU からの知識を統合して道路環境のモデルを構築するため、隠れセンサーまたは仮想センサーともみなされます。 HD マップは、道路の形状や意味論的な情報だけでなく、道路参加者、気象条件、作業ゾーン、事故のリアルタイムの認識に関する最新情報も含め、スマート シティのデジタル インフラストラクチャの総合的な表現に向けて急速に進化しています。自動運転車を大規模に展開するには、大規模な車両群がこれらのマップを構築および維持する必要があります。車両群内の自動運転車が適切に機能できるように、連携して地図を継続的に更新します。このペーパーでは、高度自動運転 (AD) システムにおけるこれらのマップのさまざまなアプリケーションについて広範なレビューを提供します。私たちは、高精度の地図を構築および維持するためのさまざまな方法とアルゴリズムにおける最近の進歩を体系的にレビューします。 HD マップ配信のためのデータ、通信、インフラストラクチャの要件についても議論され、総合されます。最後に、現在の課題を検討し、次世代デジタル マッピング システムの将来の研究の方向性について議論します。
高精度地図開発の歴史
A.デジタル地図
現代の衛星 システムと画像技術の出現により、世界の正確かつ詳細なデジタル表現の作成に革命が起こり、その結果、Google マップ、OpenStreetMap、Apple Maps、Garmin、Mapbox など、現在デジタル マップと呼ばれるものが誕生しました。デジタル マップは、道路構造と基本的な意味情報、および興味のある地点 (POI) をエンコードします。衛星画像からこれらの地図を作成するために必要な地理的特徴を抽出および特定するには、いくつかの方法と技術があります。デジタル マップは現在、特に GPS と統合されている場合には、日常生活に不可欠なツールとなっています。実際、この統合は、多数のデジタル サービス、最も重要なナビゲーションとルーティングを構築する上で中核的なコンポーネントとなっています。主に人間を支援するために開発されたこれらの地図は、人間のドライバーを支援するために最新の車両で利用できるようになりました。ただし、これらのマップの精度と精度、および AD に必要な更新時間には制限があり、車両はある程度の位置精度と詳細な車線レベルの情報を必要とします。
B. 強化されたデジタル マップ
デジタル マップは、レーン キープ アシストやアダプティブ クルーズなどの先進運転支援システム (ADAS) 機能の要件を満たすために大幅に改良されました。コントロール(ACC)。これらの強化されたデジタル マップの一般的な機能には、制限速度、道路の曲率と勾配、車線情報、交通標識と信号機が含まれます。 ADAS マップとしても知られる強化されたデジタル マップは、現在、ほとんどの最新の車両に不可欠な部分となっており、ADAS 機能を実現しています。強化されたデジタル マップには車線レベルの情報が導入されていますが、その幾何学的精度と意味論的な詳細レベルは、より高いレベルの自律性での適用性を制限します。 AD システムでは、車両は環境に対して高精度で位置を決め、現在の状況を理解し、衝突のない軌道を計画する必要があります。このレベルの自律性を達成するには、自動運転車はセンチメートルレベルの位置精度と車線レベルの幾何情報を備えた地図だけでなく、道路環境のすべての静的および動的特徴を含む環境の 3D モデルも取得する必要があります。
C. 高精度マップ
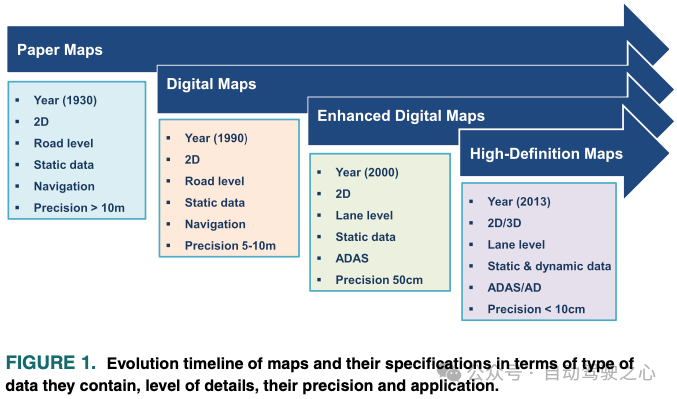
上記の要件を満たす高精度マップ、つまり高精度マップを生成する必要があります。図 1 は、マップの進化、特性、用途、および含まれる情報、精度、詳細レベルを示しています。
D. スケーラブルな地図: 概要
過去 10 年にわたり、学界と産業界の両方が大規模な研究開発努力を通じて高解像度の地図を利用できるようにしてきました。手頃な価格、自己保守性、および拡張性を備えています。しかし、スケールに合わせた HD マップの構築には、自律移動を可能にするという HD マップの可能性と最終目標を最大限に発揮するのを妨げる未解決の問題がまだいくつかあります。これらの課題は次のカテゴリに分類できます。
- 1) データ収集: HD マップのデータ収集は、時間と労力がかかるプロセスになる可能性があります。通常、GPS、IMU、LIDAR、カメラなどのセンサーを組み合わせて使用して、環境に関する詳細情報を収集します。
- 2) データ通信: データ通信には、地図データを収集場所から高精度地図を構築するための処理場所に送信し、最終的には自動運転車などの消費場所に送信することが含まれます。地図作成車両はさまざまなセンサーから大量のデータを生成し、地図を構築および更新するにはこれらのデータを処理する必要があります。多数のマッピング車両からのこのデータをリアルタイムで処理することは、確かに困難です。
- 3) データ処理: データ処理は、高精度地図を構築するために必要な要素や特徴を抽出し、高精度地図を作成するステップです。これは、複数のソースからデータを集約して調整し、マップが正確で最新であることを確認する必要があるため、特に大規模なマップの場合、非常に複雑なタスクになる可能性があります。多数の地図作成車両が地図作成プロセスに関与する場合、データの不整合を避けるために正確な時刻同期を確保する必要があります。 GPS で生成された 1 秒あたりのパルス数 (PPS) 信号を使用した同期は、すべてのオンボード センサーを同期する最も一般的な方法となる傾向があります。
- 4) 地図保守: 地図保守とは、工事現場、道路通行止め、道路接続の変更などの道路環境の変化に基づいて、高精度の地図を継続的に更新するプロセスを指します。道路環境は非常に動的で変化する可能性があるため、このプロセスでは頻繁なデータ収集と処理作業が必要になります。
- 5) データのプライバシーとセキュリティ: HD マップには建物やインフラの位置などの機密情報が含まれることが多いため、データのセキュリティとプライバシーが重要です。このデータを確実に保護し、悪用しないようにすることは大きな課題です。
- 6) マッピングのコスト: 高精度のマップを作成するプロセスでは、マップのコストは重要な要素です。大規模なマッピングには、高精度センサーを備えた高価なマッピング機器セットを搭載した多数のマッピング車両の使用が必要です。このコストは、広いエリアをマッピングする場合に重要になります。民生用センサーを使用すれば高精度のマッピングが可能ですが、これには複雑なマッピング アルゴリズムを使用するという犠牲が伴います。
E. 主な貢献内容
この文書では、階層化アーキテクチャの統合モデルを含む、HD マップの詳細な概要を説明します。同時に、モジュラーADシステムにおける高精度マップの重要性が強調され、さまざまなADコア機能でのそれらの使用が統合されています。この記事では、費用対効果の高いソリューションや、生成から配布までの通信および地図データの要件など、地図データの収集、通信、処理、セキュリティ、コストにおける課題について広範にレビューします。さらに、HD マップの構築と維持における現在の課題についても説明します。最後に、将来および次世代のモバイル高精度地図についていくつかのインスピレーションが提供されます。主な貢献を要約すると:
- 広範なインテリジェント交通システム コミュニティのコンテキストとしての HD マップのスタンドアロンの概要。
- AD システムのさまざまなコア機能の高精度マップで使用される最先端のテクノロジーを詳細にレビューします。
- HD マップをさまざまなレベルで維持し、最新の状態に保つためのさまざまなアプローチ、方法、アルゴリズムの包括的な調査。
- 統合管理などにおける HD マッピングの主な課題と将来の見通しについて話し合います。
HD マップ: 概要
初期の HD マップは、ADAS で使用される強化されたデジタル マップの単なる拡張であり、初期マップと呼ばれていました。 HD マップという用語は最近になって登場したものですが、現在では、Tier 1 自動車会社、地図プロバイダー、OEM を含む CCAM 業界で広く受け入れられています。 HD マップには、自動運転車が運転環境を非常に高い精度で理解するために必要なすべての情報がカプセル化されています。 HD マップが CCAM を実現するための中核であることは一般に受け入れられていますが、HD マップを構成する情報とその情報をどのように表現するかについての明確なガイドラインや標準はありません。それにもかかわらず、市場で入手可能な HD マップには共通の機能があります。センチメートルレベルの位置精度と、車線レベルの幾何学的および意味論的な情報の利用可能性は、ほとんどの HD マップで不可欠な機能です。最も基本的なレベルでは、HD マップは単に点と線分のセットであり、その正確な位置が道路標識、車線区分線、車線境界線、車線分離線を表します。 AD システムの要件により、今日の高精度地図はますます複雑になり、さまざまなソースからのデータが走行環境に関する複数の層の情報を構成しています。 HD マップを複数のレイヤーに分割すると、道路環境のより構造化されたデータ表現が可能になります。これにより、環境をさまざまな詳細レベルでモデル化する必要がある AD システムのさまざまなコンポーネントへのアクセスが容易になります。さらに、階層的なデータ表現により、マップの構築、保存、検索、メンテナンスが容易になります。これらの層の例を図 2 に示します。
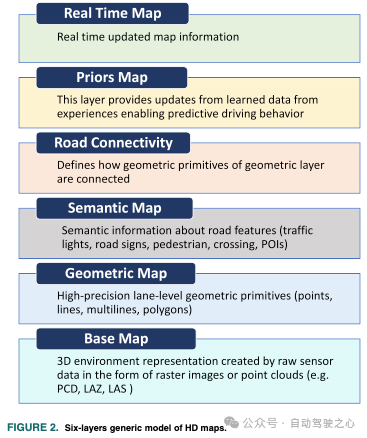
前述したように、車線境界、車線区分線の種類、交通方向、横断歩道、走行可能エリアのポリゴン、交差点の注釈などの車線レベルの詳細を含む、AD システムで使用される地図情報を表現するにはいくつかの方法があります。運転環境は非常に動的ですが、これら 3 つのレイヤーで表されるデータは静的です。環境の全体的な表現には、観測速度、気象状況、渋滞エリア、道路遮断エリア (工事) などに関するリアルタイムの交通情報も含める必要があります。このセクションでは、これらの層に格納されている情報の全体的な概要を統一した方法で提供することを試みます。ほとんどの HD マップ プロバイダーは独自の定義と形式を持っており、HD マップに単一の標準はありませんが、図 2 に示すように、HD マップに含まれる情報を 6 つの異なるレイヤーに分割しています。
A. ベース マップ レイヤー
ベース マップ レイヤーは HD マップの基礎であり、HD マップのベースとみなされます。他のすべてのレイヤーが構築されます。道路、建物、その他の構造物の位置や形状など、環境の高精度な 3 次元地理空間表現が含まれています。道路環境の 3 次元地理空間モデルは、自動運転車にとって重要な情報源になりつつあります。現在、HD マップには環境の 3 次元表現が含まれることがよくあります。ベース マップ レイヤーは通常、LIDAR からの点群や 1 つ以上のカメラからの画像を使用して、場合によっては GPS/IMU の助けを借りて作成されます。この一連のセンサーは、環境を表す高精度かつ詳細な 3D 点群を作成する MMS を形成します。道路と車線の幾何学的および意味論的な特徴がこのレイヤーから抽出され、HD マップ内の他のレイヤーが構築されます。このレイヤーには環境の高密度のデータ表現が含まれているため、自動運転車の正確な位置特定において重要な役割を果たします。点群登録のいくつかの手法を使用すると、生のセンサー データをそのレイヤーの点群と照合することで車両の姿勢を推定できます。この層の構築と更新は、データ処理と通信のニーズの点で困難です。
B. ジオメトリ マップ レイヤー
ベース マップ レイヤーは環境の正確かつ緻密な表現を提供しますが、その表現には環境の理解をサポートする意味のある特徴が欠けています。 . 機能には制限があります。 HD マップのジオメトリ レイヤーは、道路、車線、縁石、その他のフィーチャの位置と形状を含む、道路環境のジオメトリに関する詳細情報を提供します。ジオメトリ レイヤーには通常、道路の幅、車線の数、各車線の中心線、各道路の車線の境界、および路面の標高に関する情報が含まれます。また、縁石、歩道、横断歩道、垂直および水平の交通標識の正確な位置と形状に関する情報も含まれます。これらの各フィーチャは、基本的な幾何学的プリミティブ、つまり点、線、ポリライン、およびポリゴンによって表されます。たとえば、垂直の交通標識の位置は点で表すことができます。車線の中心線または境界は、ポリラインなどの相互接続された一連の線分によって表すことができます。同様に、横断歩道も多角形で表現できます。このレイヤーの幾何学的特徴は、ベース マップ レイヤーからのデータを処理することによって作成されます。ベース マップ データからジオメトリ レイヤーを構築するには、通常、道路のセグメンテーション、車線情報の抽出、道路標識、電柱、交通標識、縁石、障害物、舗装フィーチャなどのいくつかの処理ステップが必要です。このレイヤーは、道路フィーチャの高精度の車線レベルの幾何学的表現を提供します。 HD マップの幾何学的特徴は、さまざまな AD コア コンポーネントにとって重要であり、最も重要なのは動的な道路参加者の動きの正確な予測、および幾何学的に実現可能な軌道の安全な計画です。
C. セマンティック マップ レイヤー
セマンティック マップ レイヤーは、ジオメトリ マップ レイヤーによって提供される道路フィーチャの重要性を定義します。このレイヤーのデータは、マップ内で表されるフィーチャにコンテキストと意味を提供します。たとえば、HD マップのセマンティック マップ レイヤーには、道路の種類 (高速道路、住宅道路など) や車線 (左または右に変わる場合など)、その番号、交通方向、車線が正しいかどうかなどの情報が含まれています。方向転換または方向転換に使用されます。 駐車場についてのご案内。また、制限速度、車線の境界、交差点、横断歩道、交通標識、信号機、駐車スペース、バス停、および環境のコンテキスト表現を構築するために重要なその他の多くの機能に関する情報も含まれています。セマンティック マップ レイヤーにより、自動運転車は環境の詳細な状況表現を構築し、交通ルールを理解できるようになり、さまざまな交通シナリオで正しく安全な意思決定ができるようになります。簡単に言えば、セマンティック マップ レイヤーは、幾何学的マップで定義された道路フィーチャとオブジェクトにセマンティック ラベルを割り当てます。たとえば、ジオメトリ レイヤー内の点は、マップ座標参照系内の順序付けされた座標セットにすぎません。セマンティック レイヤーのみが、ポイントが信号機、徐行標識、または一時停止標識に対応するかどうかを定義します。ご存知のとおり、高精度の地図には豊富な意味情報が含まれています。また、セマンティック レイヤーは、メタデータを道路の曲率、推奨運転速度、各セマンティック特徴の一意の識別子などの道路特徴に関連付けます。実際、意味的に豊富な HD マップにより、自動運転車は運転状況をより深く理解し、複雑なシナリオで複雑な意思決定を行うことができます。ただし、道路環境の信頼性が高く忠実度の高いセマンティック グラフを構築するのは簡単なプロセスではありません。シーンのセグメンテーション、オブジェクト検出、分類、姿勢推定、マッピングに限定されず、いくつかの処理ステップが必要です。コンピューター ビジョン、ディープ ラーニング、センサー フュージョン、セマンティック SLAM アルゴリズムの最近の進歩により、正確なセマンティック グラフを構築できるようになりました。
D. 道路接続層
道路接続層は、道路ネットワークのトポロジと、さまざまな幾何学的要素がどのように接続されているかを記述します。道路レベルの情報と道路レベルの接続のみを含むデジタル マップの標準定義とは対照的に、HD マップには車線レベルの幾何学的情報と意味情報が含まれるため、2 セット以上の車線が定義されるため、道路間の接続が複雑になります。 .間のつながり。より正確には、このレイヤーは、車線の境界、中心線、交差点など、道路のレイアウトと接続性を提供します。車線レベルの接続情報は、道路と車線の間の法的な移行を計画したり、各交差点で許可される操作を計画したりするために必要であり、自動運転車の経路計画には重要です。簡単に言うと、このレイヤーは、ジオメトリ レイヤーを構成するプリミティブがどのように相互に接続されるかを定義します。これらの接続は、幾何学的要素と意味要素の連続したペアを定義することによって確立されます。各幾何学的および意味論的な要素に一意の識別子を割り当てると、グラフ データ構造を使用してこの情報を表現できるようになります。各要素はエッジとノードとしての接続によって表されます。グラフィカルな構造により、地図の迅速なクエリと検索、および効率的なルート計画が可能になります。
#E. 事前マップ レイヤー
このレイヤーは、過去の経験から情報を表し、学習するため、事前マップ レイヤーとも呼ばれます。これには、時間の経過とともに状態が変化するマップ内の幾何学的要素と意味要素が含まれます。フリートデータから交通の流れと事故現場の状況を学習することで、より効率的かつ予測的な運転行動が可能になります。この層は、人間の運転行動や交差点の信号機の動的状態の予測に役立つ情報も取得および学習します。また、駐車命令、占有状況、時刻表などの一時的な道路設定にも適応します。たとえば、一部の都市では、特定の平日に路上駐車が変更され、占有率が予測され、特定の駐車場を管理する時間ルールが、その駐車場を通過するさまざまな車両の以前のマップ レイヤー センサーの読み取り値から導出されます。 。道路ドライバーの運転行動を学習し予測することは、異なる社会間の社会文化的な違いにより困難な場合があります。これらの動作を経験的にモデル化することは、一般的でスケーラブルな AD システムにとって重要です。F. リアルタイム マップ データ
HD マップのリアルタイム レイヤーは、交通状況、道路などの環境に関するリアルタイムの情報を提供する動的レイヤーです。自動運転車のナビゲーションに関するイベント。このレイヤーは通常、車両に搭載されている、または道路脇にあるカメラ、センサー、その他の接続されたデバイスなど、さまざまなソースからのデータを組み合わせて作成されます。特定の通信ネットワークを使用した参加車両やスマート インフラストラクチャのクラウドソーシングを通じて、データがリアルタイムに収集され、高精度地図の更新に使用されます。リアルタイム レイヤーには、他の車両の位置と速度、信号機の位置と状態、道路上の工事区域やその他の障害物や障害物の存在などの情報を含めることができます。この情報は、自動運転車が交通の流れを最適化し、渋滞を軽減するためにリアルタイムで安全かつ効率的な運転の意思決定を行うために重要です。さらに、リアルタイム レイヤーを使用すると、マップの作成に使用されたセンサーによってキャプチャされなかった可能性のある環境に関する最新情報を提供することにより、HD マップの精度と完全性を向上させることができます。簡単に言えば、HD マップのリアルタイム レイヤーは、環境の動的な最新の表現を提供します。動的要素を含む HD マップのリアルタイム更新は困難であり、複雑なインテリジェントな通信インフラストラクチャと複数のアクター間の協力が必要です。高度道路交通システム (ITS)、HD マップ プロバイダー、車両間のデータ送信は信頼性が高く、この調査で後述する特定の要件を満たしている必要があります。
自動運転システム アーキテクチャにおける高精度マップ
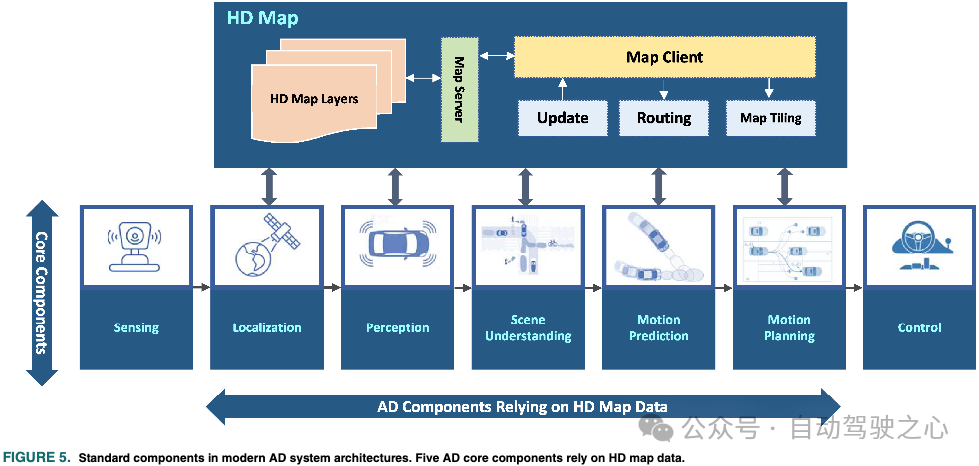
高精度マップは、AD システムに道路環境の詳細かつ正確な表現を提供します。これらのマップには、自動運転車の安全かつ効率的なナビゲーションに必要な、車線レベルの幾何学的、位相的、および意味論的な情報が含まれています。自動運転車で HD マップを使用すると、周囲の状況をよりよく理解し、ルートを計画し、より正確な運転判断を下して、乗客や他の道路利用者の安全を確保できます。このセクションでは、AD システムにおける高精度マップの重要性と使用について説明します。超高精度の地図データは、現在、AD システムのさまざまなコア コンポーネントのほとんどに不可欠な部分になっています。 AD における HD マップの重要性と使用法について説明するために、典型的な最新の AD システムのアーキテクチャと標準コンポーネントを簡単に紹介します。図 5 は、AD システムの標準コンポーネントを示しており、HD マップに依存するコンポーネントを示しています。このセクションは、AD システムのアーキテクチャ、その動作方法、およびそのさまざまなコンポーネントについて簡単に説明することから始まります。このセクションの残りの部分では、HD マップに依存する AD コンポーネントの最先端技術について広範にレビューします。
A. 自動運転システム アーキテクチャ
自動運転車は複雑なサイバー物理システムであり、堅牢で信頼性が高く安全な方法で全体を完成させるために、さまざまなコンポーネントが連携する必要があります。運転タスク。 AD システムに固有のアーキテクチャはありませんが、この作業では、HD マップを使用して AD システムのさまざまな機能を改善する方法を理解するのに役立つ共通のアーキテクチャに依存しています。他のロボット システムと同様に、自律走行車は、(1) センサー、(2) 知覚、(3) 行動という 3 つの主要なコンポーネントを備えた認知エージェントとみなすことができます。これらの要素を業界グレードの AD システムに分解すると、図 5 に示すように、いくつかのコンポーネントが得られます。最新の AD システム アーキテクチャのセンシング コンポーネントには、通常、IMU、GPS、カメラ、LIDAR、レーダーなどのさまざまなセンサーが含まれます。これらのセンサーのサブセットを使用すると、車両は環境に対する相対的な位置を知ることができ、つまり位置特定が可能になり、残りのセンサーは環境自体を感知するために使用されます。センシング コンポーネントの役割は、生のセンサー データを読み取って前処理し、それを AD システムの他の部分に提供することです。最も単純な形式では、センシング コンポーネントは、生のセンサー データをリアルタイムで読み取る一連のセンサー ドライバーで構成されます。測位コンポーネントは、AD システム全体の信頼性の高い動作にとって最も重要なコンポーネントの 1 つです。その目的は、車両の位置を正確に推定することです。局所的なエラーは、AD 処理パイプラインの残りの部分に伝播されます。ローカリゼーションは、センシング コンポーネントからの生のセンサー データを融合する単なる状態推定器です。さらに、マップを利用できるため、特に一部のセンサーが故障したりパフォーマンスが低下したエリアで、位置特定が改善され、堅牢になります。知覚の役割は、障害物や道路要因に関する情報を含む、環境の現在の状態の中間レベルの表現を生成することです。この表現には、車線 (位置、境界、標識、種類)、交通標識、信号機、および走行可能エリアに関する詳細も含まれます。コンピューター ビジョンとディープ ラーニングの技術は、セグメンテーション、クラスタリング、分類タスクに広く使用されています。さらに、ターゲットレベルの融合もこのコンポーネントの重要な部分です。知覚の出力は、追跡されたオブジェクトのリストと、シーンを理解するための画像のセマンティック セグメンテーションです。 HD マップからの幾何学的および意味論的な情報を使用して、オブジェクトの検出と融合を改善することもできます。認識エラーは AD システム全体で使用される情報の品質に影響を与える可能性があるため、正確な認識は安全性にとって非常に重要です。したがって、冗長センサー データ ソースを使用すると、認識の精度の信頼性が高まり、システム全体の堅牢性が向上します。シーン理解コンポーネントは、AD システムの知覚コンポーネントと、高レベルの認知コンポーネントによって与えられる環境の抽象的な中間レベルの状態表現の間のブリッジです。このコンポーネントは、認識コンポーネントによって提供される高精度のマップとデータを構築することで、運転シナリオの状況に応じたより高いレベルの理解を提供することを目的としています。このセクションの後半では、これら 2 つの情報源を融合して、運転環境を理解するためのシーン表現を構築する方法について説明します。 HD マップに依存する AD パイプラインのもう 1 つのコンポーネントは、動き予測コンポーネントです。これは、シーンの理解によって提供される環境の高レベルの時空間表現に基づいて構築され、車両の周囲の道路管理者の行動を予測します。動き予測における HD マップの役割は、シーン内の各道路エージェントの以前の軌跡を提供することです。動き予測は、HD マップが重要な役割を果たす高度にマルチモーダルな問題であり、このセクションで詳しく説明します。動作計画コンポーネントは、自動運転車の実現可能で衝突のない安全な軌道を計算するように設計されています。これは、HD マップ データ上で実行されるルーティング アルゴリズムによって取得されるグローバル最短経路とロード エージェントの予測軌跡を最適化することによって実現されます。動作計画には、検出されたオブジェクトと HD マップによって定義される現在のシーンの状態に依存する動作計画機能も含まれています。制御ユニットは計画された軌道を受け取り、ステアリング、ブレーキ、加速駆動システムの制御コマンドを計算します。制御コンポーネントはマップ データに明示的に依存していないため、この調査では考慮されません。最後に、図 5 に示すように、特別なコンポーネントを使用して、マップ データを提供するリクエストを処理することで他のすべてのコンポーネントにサービスを提供します。 HD マップ データは通常、データベースに保存されており、車両内のマップ クライアントからのリクエストのルーティング、タイル化、更新を行うためにマップ サーバー (ローカルまたはクラウド) によってクエリが実行されます。ルーティング要素は特殊なアルゴリズム処理を必要とするため、AD システムにおける HD マップ アプリケーションの調査で検討します。
B. 位置決め
AD システムの位置決めコンポーネントは、グローバル基準座標系に対する車両の位置と方向を推定するように設計されています。その重要な役割は、システム内の連続するコンポーネントの必要な推定において高い精度と堅牢性を継続的に維持することです。測位アルゴリズムの精度によって、AD システム全体の信頼性が決まります。推定パフォーマンスの低下は深刻な結果や潜在的な損害につながる可能性があるため、悪天候条件下での測位の堅牢性は最新の AD システムの重要な要件です。過去 20 年間にわたり、測位に関する重要な研究が目覚ましい成果を上げ、さまざまな方法が誕生しました。通常の動作条件を確保し、世界規模のシステムの安全性を達成するには、自動運転車の位置を 10 センチメートル以内の精度で位置決めする必要があります。
C. 知覚
AD システムの知覚コンポーネントは、多くの場合、生のカメラ画像や LIDAR 点群の処理に関連しており、静的なターゲット (例: 、交通標識、道路標示など)、周囲の車両、歩行者、自転車などの動的障害物の検出と追跡にも使用されます。認識は、AD システムの重要な中核機能の 1 つです。衝突のないナビゲーションを確保するには、その信頼性とリアルタイム パフォーマンスを確保することが重要です。知覚データと、HD マップのレイヤーに含まれる詳細かつ正確な幾何学的情報および意味情報を融合すると、最も関連性の高い関心領域 (ROI) に焦点を当てることで、知覚を改善できる可能性があります。より正確には、HD マップのジオメトリにより、点群をフィルタリングするための ROI を定義して、特に関心のある点だけを知覚機能に残すことができるため、迅速な検出が簡素化され、計算効率が向上します。
D. シナリオの理解
自動運転車が正しく安全な意思決定を行うには、運転環境を理解することが重要です。 HD マップの初期の動機の 1 つは、環境を理解するのに役立つ正確かつ詳細な情報を自動運転車に提供することでした。この情報により、AD システムは現在の運転状況を理解し、シーンを構成するすべてのエンティティを解釈できるようになります。マップに含まれるジオメトリとセマンティクスにより、コンパクトなデータ モデルと環境表現を体系的に構築できるようになり、車両が複雑な運転シナリオに対応できるようになります。より正確には、AD システムのシーン理解コンポーネントは、HD マップの幾何学的および意味論的な情報によってサポートされ、意味のある知覚コンテキストを一貫して提供できます。生の物体検出に加えて、シーン理解は安全上重要な情報を抽出および推定し、それを後続の処理段階で利用できるようにすることを目的としています。
#E.ROUTING
道路レベルのデジタル マップは、ドライバーのナビゲーションを支援します。これらのマップには車線レベルの詳細が含まれていないため、これらのマップでのルート計算では、道路レベルの接続を使用する以上のことはできません。時間とエネルギーを節約し、世界中で車両の安全性を促進するには、正確で最適化された走行ルートが必要です。効率的かつ低コストの走行ルート計算では、環境の車線レベルのモデルを考慮する必要があります。さらに、非常に動的な環境では、自動運転車が環境内を移動するときにルートを動的に調整するには、交通状況と車線占有率に関する詳細な情報が重要です。詳細で正確な車線レベルの情報と、HD マップ静的レイヤーのアプリオリおよびリアルタイム レイヤーを考慮して、効率的な動的ルート計算が可能です。自動運転車のルーティング サブシステムが現在位置から設定された目的地までの走行可能な経路を計算するには、図 5 に示すように、システムに HD マップ サーバーから最新の地図が提供される必要があります。あるいは、デジタル地図と同様に、ルート計算をサービスとして提供することもできます。正確な位置が HD マップ サーバーに送信されると、最適なルートが計算され、システムの他のコア コンポーネントをサポートするために車両にフィードバックされます。過去数年間、これらのルート案内サービスには、リアルタイムの交通状況とエネルギー要因 (最もエネルギー効率の高いルートなど) が考慮されてきました。自動運転車の場合、ADS によるナビゲーションが困難な複雑な都市環境を回避するルートや、リアルタイムの高精度地図サービスなどのオンライン サービスへの継続的な接続を保証するために良好なネットワーク カバレッジを備えたルートなど、他の要素を考慮することができます。F. 動作計画
AD システムにおける動作計画の役割は、実現可能で安全、衝突のない、省エネの軌道を生成することです。動作計画タスクには通常、軌道の生成と動作計画が含まれます。行動計画は、車線変更、車線内追従、減速、駐車など、さまざまな運転状態間の移行を決定するために使用される高度な意思決定機能です。これらの変換を安全に実行するために、行動プランナーは車両環境の変換モデルを構築するためにローカル マップと車両認識を必要とします。移動ロボットによるナビゲーションとは異なり、道路環境は高度に構造化されており、すべての道路利用者は交通規則に従わなければなりません。生成された AD 軌道は、交通ルールの遵守と走行可能な道路エリア内での移動を保証するために厳密に要求されます。自動運転車の動作計画にはさまざまな方法が存在しますが、それらはすべて、交通規則に準拠するために、高精度の地図によって提供される幾何学的および意味論的な情報にある程度依存しています。サンプルベースの動作計画方法では、HD マップのレーン ジオメトリを使用して、実行不可能な候補軌道を拒否することで探索空間を制限します。G. 動作予測
運転環境は非常に動的であり、歩行者、車両、自転車などのさまざまな道路関係者が関与します。自動運転車がインタラクティブ環境のコンテキスト認識型表現を構築し、潜在的に危険な状況を予測するには、これらの道路関係者の将来の動きや行動を予測することが重要です。抽象的な観点から見ると、これらのトラフィック参加者は、複雑なマルチエージェント システムと考えることができます。実際、道路管理者の動きや行動を予測するための信頼できるソリューションを開発すると、自動運転車の安全性が向上し、現実の交通状況における人間のような行動に適応する能力が向上します。こうした交通参加者の行動を予測することは AD システムにとって極めて重要であり、主にリスク評価と安全で快適な移動計画に使用されます。動き予測とは、道路管理者の現在の状態と環境のモデルに基づいて、道路管理者の将来の行動を推定することを指します。さまざまな研究活動が、道路参加者の将来の移動を予測するという問題に取り組んできました。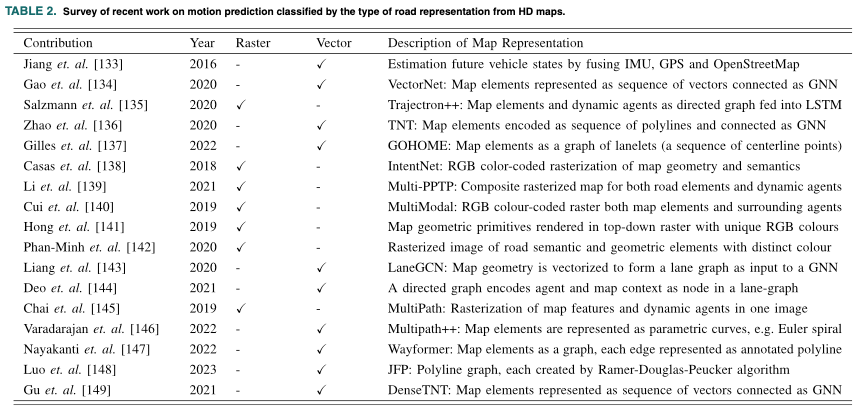
H. サードパーティ アプリケーション
高精度マップは、正確で信頼性の高い GT データを提供でき、これを参照として使用できます。センサー出力を校正しています。たとえば、高解像度マップの幾何学的要素の高精度座標を使用して LIDAR を校正し、IMU と完全に位置合わせすることができます。センサーの測定値を HD マップ データと比較することで、エラーや不一致を特定して修正できるため、センサーのキャリブレーションが向上します。さらに、HD マップはオンライン (セルフ) キャリブレーションに使用できます。 HD マップ、リアルタイムの生のセンサー データ、および比較を実行するアルゴリズムを利用できるため、センサーの測定値と GT の間の誤差を計算できます。したがって、センサーの校正誤差をリアルタイムで継続的に修正できます。これにより、環境条件の変化やセンサー性能の変化に対する AD システムの堅牢性と信頼性が向上します。オンライン キャリブレーションでは、オフライン キャリブレーション方法と比較して、より正確で堅牢なセンサー キャリブレーションが可能になります。最近では、HD マップを使用して道路の注釈を強化し、交通ランドマーク検出用の大規模なデータセットを作成しています。
高精度地図の構築
A. モバイル マッピング システム
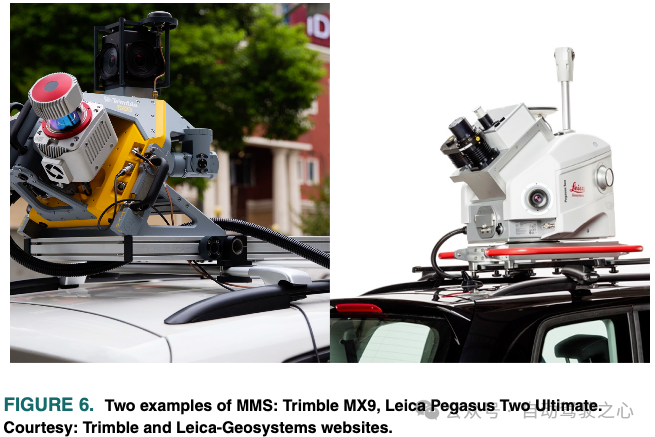
高精度地図の構築は複雑なプロセスです。いくつかの手順が必要です。 HD マッピング プログラムを構築する最初のステップは、高精度で適切に調整された一連のセンサーを搭載した特殊車両を派遣して、環境に関するデータを調査および収集することです。マッピングに使用されるデータ収集車両には、最大数センチメートルの RTK (リアルタイム キネマティクス) 測位精度を備えた補正サービスや、補正サービスを可能にする高精度 GNSS への接続が装備されている場合があります。 GNSS 測位測定は、多くの場合、高性能 IMU (慣性測定ユニット) や車輪走行距離計からの測定と統合されます。 GNSS と IMU を慣性航法システムとして 1 つのユニットに統合した商用製品がいくつかあります。マッピング車両には、道路環境の生の 3D/2D データを収集するために 1 つ以上の高解像度 LIDAR とカメラも装備されています。マッピング用のデータ収集ツールを設定するには 2 つの方法があります。最初のステップは、上記のセンサーを購入し、適切な構成を選択して車両に取り付けることです。このアプローチでは、事前定義されたセンサー構成の柔軟性が提供されますが、プロットに必要な精度にいくつかの異なるセンサーを校正することは簡単ではなく、特にカメラの場合は時間がかかります。あるいは、一部のメーカーは、モバイル マッピング システム (MMS) と呼ばれる、センサーのセット全体を 1 つのパッケージで提供しています。商用 MMS の例を図 6 に示します。
#高解像度マップのメンテナンス
最新の高解像度マップを使用することは、さまざまな AD コア コンポーネントを正しく動作させるために重要です。 。 HD マップのバグは、システムによる不適切な決定により重大な損害を引き起こす可能性があります。地図車両を頻繁に更新することで、誤った決定を回避できます。道路環境は非常に動的であり、新しいインフラ建設、道路保守、車線拡張により頻繁に変化する可能性があります。マッピング車両は環境の変化を検出し、それを送信して地図を更新できなければなりません。地図更新プロセスには、さまざまなスケールでの複数のソースやセンサーからのデータの処理、保存された地図と新しく収集された環境データの間の偏差の特定、最終的にこれらの偏差を統合して地図のさまざまなレイヤーを更新するなど、複雑な処理ステップが含まれます。 HD マップの変更を取得して更新するためのいくつかの方法とアプローチが文献で開発されています。以下では、HD マップの変更を検出するためのさまざまな方法と方法、およびこの情報をマップの更新にどのように適用できるかを検討します。 HD マップを維持するための以前の取り組みを調査するために私たちが従ったアプローチは、表 3 に示すように、各最先端の方法によって維持されるレイヤーの分析に基づいています。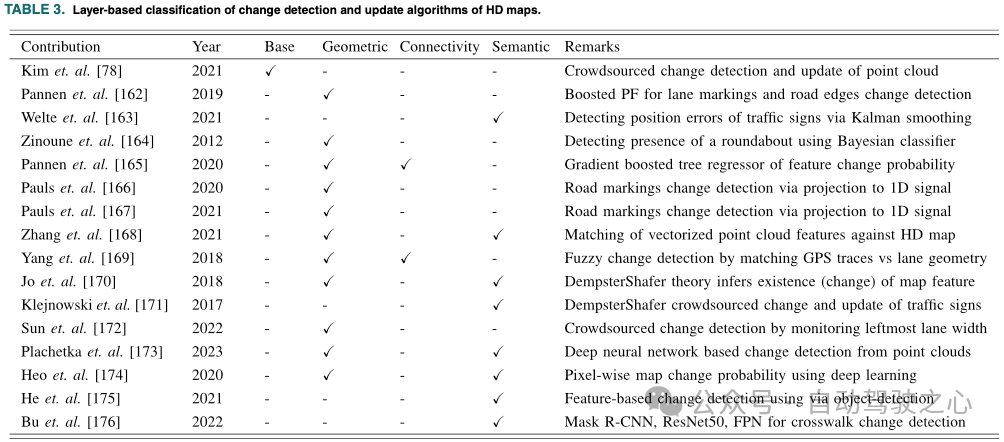
A. マップ変更検出
HD マップにおける変更検出とは、次のような環境内の変更を識別するプロセスを指します。新しい建物、道路の通行止めなど。マップのレイヤーはそれに応じて更新されます。 HD マップは定期的に変更されるため、自動運転車にとって信頼できるマップを持つことは、安全なナビゲーションにとって不可欠です。変化の検出は通常、カメラ、ライダー、レーダーなどのさまざまなセンサーをコンピューター ビジョン アルゴリズムや機械学習技術と組み合わせて使用することで実現されます。高解像度の地図が登場する前から、変化検出アルゴリズムは多くのアプリケーションに導入されてきました。リモート センシングは、地図変更の検出と更新の初期のアプリケーションの 1 つです。また、都市監視、森林変化、危機監視、三次元地理情報更新、建設進捗監視、資源調査にも使用され、成功を収めています。これらのアプリケーションの最も基本的なレベルでは、問題は生のセンサー データ、主に 3D 点群、2D 画像、またはその両方の組み合わせを比較することになります。B. マップ データの更新
HD マップ メンテナンスの 2 番目のフェーズは、変更検出の結果に基づいてマップ要素を更新することです。簡単に言うと、地図の更新は確率的データ融合問題に相当します。絶えず変化する環境の変化をほぼリアルタイムで継続的に監視し、時間と空間の異なるデータ パターンを融合し、異なるソースから複数のレイヤーを更新することは、実に困難な作業です。 Cadenaらは調査論文の中で、大規模な自動運転車によって作成および使用される高精細地図を更新および維持する分散プロセスが将来の研究にとって魅力的なテーマであると指摘している。この方向で、Kim らは、クラウドソースの点群データから新しいフィーチャ レイヤーを最新の状態に保つソリューションを提案しました。この新しい特徴マップは、HD マップのさまざまなセマンティックおよび幾何学的特徴を構築するための基礎を形成します。
HD マップ用のデータおよび通信インフラストラクチャ
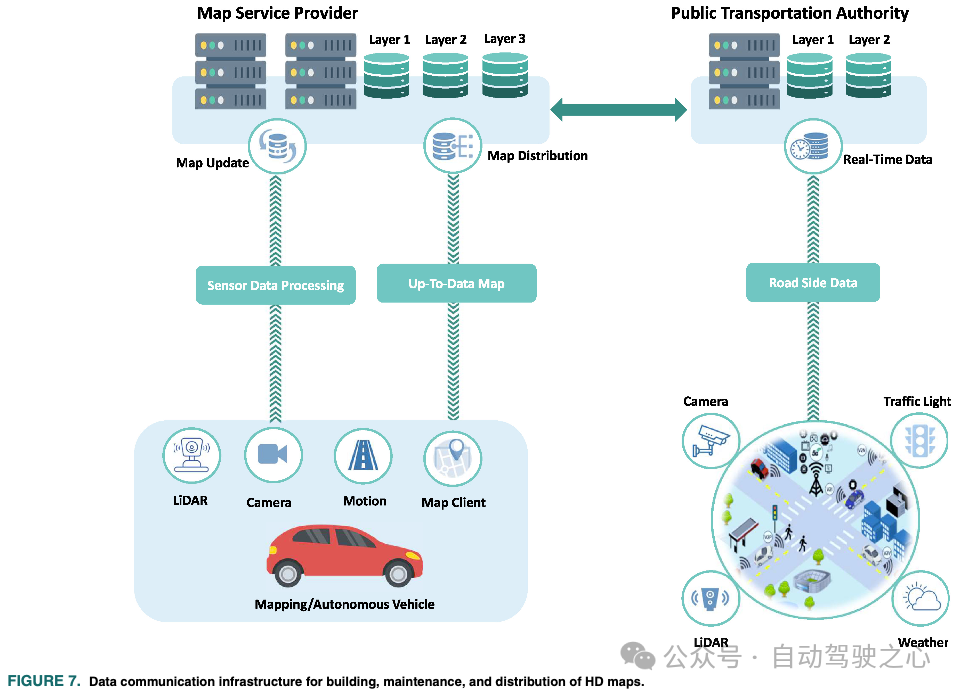
大規模な HD マップの構築と維持は、複数の関係者 (ITS 政府、地図プロバイダーなど) 間のデータ交換の問題です。図 7 に示すように、道路沿いのインフラストラクチャ所有者としての車両。地図データの収集、構築、保守、配布には、信頼性の高い通信と分散コンピューティング インフラストラクチャが必要です。このセクションでは、HD マップの作成、保守、配布を拡張するために必要なデータおよび通信インフラストラクチャについて説明します。
課題と今後の展望
CCAM は過去 10 年間で大きな進歩を遂げましたが、車両の完全な自動運転を達成することは依然として課題です。未解決の課題。自動運転車を大規模に展開するには、HD マッピングのためのスケーラブルなソリューションが重要です。このセクションでは、HD マップ CCAM の可能性を最大限に発揮するために対処する必要があるさまざまな課題に光を当てます。関係者間で地図データを構築、維持、配布するための費用対効果が高く柔軟なソリューションが利用可能になれば、将来の世代のスマート シティにおける CCAM の拡張性が大幅に向上することは疑いの余地がありません。さらに、HD マップの将来の展望と応用についても説明します。
A. 課題
- 標準化とデータ表現: 高解像度地図の概念は広く受け入れられており、CCAM の重要なテクノロジーとなっています。ただし、地図データを表現する方法、必要なレイヤーの数、各レイヤーにどのような地図データを保存する必要があるか、および地図データをどのようなデータ形式で保存する必要があるかについては、コンセンサスがありません。 HD マップは複雑で、それに含まれるデータや情報が大量であるため、普遍的な標準を定義することが難しく、包括的で理解しやすく、保存、保守、更新、更新が容易な標準を作成することが困難になっています。そして効果的に配布します。地図データの共通標準を定義すると、開発と統合のコストを削減しながら、データの互換性が向上し、データへのアクセスが容易になります。さらに、これによりデータの品質、一貫性、プライバシーが向上し、自動運転車を含むすべての関係者の交通安全が向上します。
- スケーラビリティ: スケーラブルな HD マッピング ソリューションは、自動運転車の大規模導入には不可欠です。都市、地域、全国の高解像度地図を作成し、それらを最新の状態に保つことは、特に幾何学的な道路の特徴や交通標識を表現するために使用されるさまざまな規格、交通ルール、規制に対処する場合、依然として大きな課題です。これらの基準は地域によって異なります。マッピング アルゴリズムは汎用的であり、さまざまな地域や国にまたがって機能できる必要があります。マッピングは、変更された領域を修正するためのデータ収集と処理の継続的なプロセスである必要があります。このプロセスは、多数の車両がマッピング プロセスに参加する必要がある広い地理的領域では困難になります。マッピングのコストは、マッピングするエリアの広さと、そのエリアに必要な車両の数に直接依存します。この記事の前半で説明したように、地図作成車両は非常に高価です。さらに、消費者向けグレードのセンサーを備えた個々の車両を使用するには、まだ成熟していない複雑なアルゴリズムが必要です。
- ネットワークとコンピューティング インフラストラクチャ: スケーラブルな HD マップの構築と更新に関連して大量のデータを処理するには、調整されたほぼリアルタイムの信頼性の高いネットワークとコンピューティング インフラストラクチャが必要です。 5G/6G セルラー通信、モノのインターネット (IoT)、エッジ コンピューティング アーキテクチャの出現により、車内通信の多くの機会が一般的に利用可能になり、高解像度マップの構築を処理するソリューションが商業的に実行可能なオプションになりました。これらの通信およびコンピューティング インフラストラクチャは、このようなデータ集約型アプリケーションを処理し、遅延と帯域幅の要件を満たすように設計されています。多数の接続された車両を含む大規模なクラウドソーシング マップは、これらのインフラストラクチャの主なアプリケーションの 1 つになります。
- マッピング アルゴリズムの限界: HD マップの構築プロセスを自動化するために多大な研究開発が行われているにもかかわらず、HD マップに関する最近の研究結果は、トポロジカル マッピング アルゴリズムが依然として単純な特徴に限定されていることを明らかに示しています。現在の最先端のアルゴリズムは、単純な幾何学的特徴を検出できますが、ラウンドアバウト交差点などの曲率の高い地物を処理することはできません。さらに、これらの方法のほとんどは、適切なベクトル形式で特徴を取得するためにいくつかの後処理ステップを必要とします。地図の意味論的な特徴は依然として、非常に少数の容易に検出可能な交通標識に限定されています。簡素化された道路/車線接続ネットワークを構築するための車線トポロジの構築の問題に対処し始めた最近の研究はほとんどありません。汎用マップ パイプラインを開発すると、幾何学的、意味論的、位相的な情報を含む完全に機能する HD マップの構築が可能になります。このようなパイプラインの構築は依然として課題です。
- 地図データの所有権、プライバシー、完全性、配布: HD 地図の構築と維持の将来は、関連するプロセスを自動化し、数百万台の車両に配布することになります。環境から大量の分散データを収集、処理、保存すると、データの所有権、プライバシー、整合性、および配布に関していくつかの懸念が生じます。生の地図データは車両内で生成され、公的機関からの他のデータ ソースと集約され、地図プロバイダーによって処理および配布されます。大規模な HD マップでは、収集から配布までのマップ データの所有権に対処する必要がある場合があります。さらに、個人と車両のプライバシーの保護は非常に重要であり、描画プロセス中に考慮する必要があります。地図データには、車両の正確な位置や車両環境の正確な説明などの機密ユーザー情報が含まれる場合があります。特に自動運転車で使用される場合、誤った致命的な決定を回避するには、HD マップ データの整合性を確保する必要があります。正確で信頼性の高い高解像度地図の構築は、依然として進行中の研究課題です。商用 HD マップは通常、手動でレビューおよび検証されます。クラウドソーシングなどを通じて、複数のデータ ソースから正確で信頼性の高い高解像度地図データを生成するには、対処する必要がある多くの技術的問題が生じます。スケーラブルな高解像度地図の所有権、プライバシー、完全性が最近、研究者の注目を集め始めています。一方、ブロックチェーンは、その分散型で安全な性質により、データの整合性を確保するための有望なソリューションであることが証明されています。データのトレーサビリティ、プライバシー、整合性を維持しながら、スケーラブルな HD マップを構築および更新するユースケースは、ブロックチェーンの完璧なアプリケーションです。この技術は、次世代の高精細地図の構築と配布において中心的な役割を果たすことが期待されています。
B. 将来の方向性
- 精度: 正確な測位は、自動運転車に高解像度マップを導入する主な動機の 1 つです。道路環境の高密度でコンパクトな表現の存在は、特に位置特定に関しては、HD マップの基礎となります。 HD マップに含まれる情報の密度と、この情報を処理するために必要な計算量との間には、常にトレードオフが存在します。ニューラル 3D シーン表現の最近の進歩により、フォトリアリスティックな 3D シーンを非常にコンパクトな表現で再構築できるようになりました。 Neural Radiation Fields (NeFR) を使用してベース マップ レイヤーを表現すると、このレイヤーのコンパクトでフォトリアリスティックな表現の恩恵を受けることができます。この技術は自動運転車の新時代の到来をもたらす可能性があります。
- 自動運転を超えたアプリケーション: HD マップは、主に自動運転車が環境を理解し、その中で安全に移動できるようにするために開発されました。 HD マップは環境を詳細かつ正確に表現するため、従来のデジタル マップによって提供されるさまざまなサービスの品質を向上させるために使用することもできます。さらに、HD マップは障害のある人のためのデジタル支援技術において重要な役割を果たします。視覚障害者が適切なセンサーを装備し、高精度で詳細かつ意味的に豊富な環境表現にアクセスできれば、視覚障害者の移動性と安全性は大幅に向上します。正確に配置されていれば、デジタル支援デバイスは環境を解釈して理解して、安全なナビゲーションのための音声ナビゲーション メッセージを生成できます。歩行者 HD マップ内の信号機のリアルタイムのステータスやその他の交通情報は、これらのデバイスの機能強化に関連しています。現在、ほとんどの HD マップ プロバイダーは車両環境を表すマップのみを提供しています。歩道や自転車道など、車両以外の参加者が関わるルートは、現在の HD マップにはまだマッピングされていません。すべての参加者向けの高解像度マップを構築および更新することで、幅広い自律型および非自律型ナビゲーションと、多くの便利なデジタル サービスへの道が開かれます。
- デジタル ツインに向けて: 環境デジタル ツインは、環境のすべての物理的および機能的特性を含む、環境の総合的なデジタル表現です。都市規模のデジタル ツインは、IoT センサー、コネクテッド ビークル、建物、スマート インフラストラクチャ、交通ネットワーク、その他すべてのデータ ソースのさまざまなソースから得られるデータ駆動型モデルを構築することを目的とした CCAM の新しいコンセプトです。データは結合されます。道路サービスを改善するための包括的なリアルタイム都市モデルの作成に役立ちます。この概念は、コネクテッドおよび自律走行車のデジタル モデルとしての HD マップを、社会のすべてのエンティティを支援する総合的なデジタル モデルに一般化します。デジタル ツインを使用すると、環境内のさまざまなエンティティの動作を、顕微鏡レベルの詳細までモデル化することもできます。 HD マップはデジタル ツインの単一モジュールとなり、スマート シティのコネクテッド カーや自律走行車向けのさまざまな機能とサービスをサポートします。高解像度の地図は複雑な運転シナリオをシミュレートするために使用できるため、デジタルツインはこれらの車両の複雑な都市規模のシナリオをシミュレートおよび分析するために使用されます。デジタルツインにより、新たな開発や交通パターンの変化による影響の調査、分析、シミュレーションが可能になり、都市計画者や意思決定者が将来のシナリオを予測して改善の機会を特定することで都市のパフォーマンスを分析し、最適化するのに役立ちます。都市規模のデジタルツインを構築することは確かに大きな課題であり、大量のデータが必要であり、複雑で時間のかかるプロセスになる可能性があります。分散された大量のデータの相互検証、整合性、信頼性は、デジタル ツインを作成する際の課題のままです。車両からのクラウドソーシングによるロード マッピングは、異種接続されたセンサーからの大量のデータを同時に使用して屋外および屋内のマッピングを行うための統合プロセスに置き換えられます。
結論
HD マッピングは、現実世界の CCAM アプリケーションで急速に成長し続けており、この分野の革新と進歩を推進しています。 AD システムでの HD マップの適用、および HD マップを構築および維持するためのアルゴリズムとインフラストラクチャに関して、大量の研究開発作業が行われてきましたが、これらの取り組みを要約して足がかりを提供できる文献はほとんどありません。 。このペーパーでは、コスト効率の高いソリューション、生成から配布までの通信および地図データの要件など、HD マップの構築と維持に関するこれまでの取り組みを広範にレビューします。さらに、この記事では、HD マップの構築と維持における現在の課題についても説明します。より正確には、広範なインテリジェント交通システム コミュニティのコンテキストとして HD マップの独立した概要を提供します。また、AD システムのさまざまなコア機能に HD マップを使用するための最新テクノロジーについても議論および分析します。さらに、さまざまなレベルで HD マップを構築し、それらを最新の状態に保つためのさまざまなアプローチ、方法、アルゴリズムについて徹底的に議論およびレビューします。最後に、次世代モバイル アプリケーション向けの HD マップの将来の開発について説明します。
以上がクラウドベースおよび車ベースの MapNeXt がすべて完了しました。次世代オンライン高精度地図の構築の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。