



前書き
自動駐車システムとは、車両が自ら駐車スペースを見つけ、人手を介さずに正確に駐車できるシステムであり、ユーザーのニーズに応じて駐車することもできます。要件が指定された場所に移動されます。この技術の成熟により、駐車スペースを探す際に発生する車両の衝突や摩擦などの安全上の問題だけでなく、長時間駐車スペースを探す無駄な時間など、駐車プロセスにおける人々の不便さも大幅に軽減されるでしょう。
現在、多くのテクノロジー企業や大学研究室が自動駐車の分野を研究しています。メルセデス・ベンツやボッシュなどの企業は駐車インフラを確立しており、NVIDIA は自動運転アルゴリズムと駐車場用の駐車スペース検出方法を開発しており、BMW も量産車に自動駐車モジュールを搭載しています。
自動駐車技術に対する業界の広範な需要を考慮して、私たちは自動駐車システムの開発状況について体系的な調査を実施しました。自動駐車システムの業界標準動向、性能評価指標、自動駐車システムの各サブモジュールに組み込まれた技術などが含まれます。
自動駐車業界の現在の標準動向
現在の自動駐車システムは産学界から広く注目されており、様々な国や企業が自動駐車の開発を続けています。テクノロジー。したがって、自動駐車技術に関する規格の策定は特に重要です。開発された技術標準には、地理情報、屋外測位、屋内空間測位、駐車標準、車両通信が含まれます。標準 コンテンツのいくつかの側面、特定の標準を次の表にまとめます。
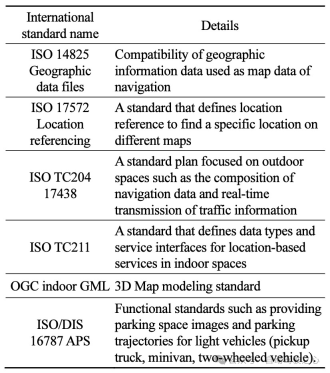
自動駐車業界の関連基準
- 地理情報と位置基準により、屋外スペースの命名、定義、形式の原則と基礎が確立されます。 , このような規格には、ISO 14825、ISO 17572、ISO TC204 177438などが含まれます。
- ISO TC211 や OGC 標準など、屋内空間の測位の標準化も策定されています。
- ISO/DIS 16787 APS 駐車規格は、駐車に必要な情報の種類を提案し、車両を制御するための技術名を定義します。さらに、この規格では、駐車支援システムを実装し、車両のステアリング制御機能を実行するために必要な機能も定義されています。
自動駐車システムの評価基準
現在の自動駐車システムの評価は、自動運転部分の評価# #の2つの部分から構成されています。 # と 自動駐車部分のレビュー。
自動運転部品の評価基準
自動運転技術の評価は、自動運転技術と自動運転技術を組み合わせた自動車工学会が策定した「自動運転技術ステージ」の基準に準拠します。運転技術 技術レベル、制御対象、運転能力に応じて6つのレベルに分かれています。各レベルの評価を容易にするために、開発中の ISO/WD 34501 および ISO/WD 34502 規格が提案されました。 ISO/WD 34501 規格はレベル 3 システムのテスト シナリオの用語と定義に適用され、ISO/WD 34502 規格はテスト シナリオと安全性評価プロセスに関するガイダンスを提供します。この規格の策定は、自動運転技術の開発・応用における統一的な評価基準を定め、自動運転技術の開発を促進することを目的としています。自動駐車部分の評価基準
現在、自動駐車技術が注目を集めていますが、国際規格の策定はまだ初期段階です。自動運転の評価基準とは異なり、自動駐車の技術レベルは主に開発者の評価基準によって測られます。 次の表は、交通状況シナリオ システムにおける自動駐車シナリオの例を示しており、駐車シナリオはパフォーマンス レベルに応じて分類されています。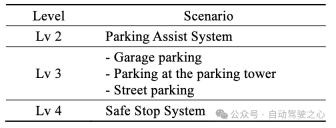
- 第 2 レベル (Lv2): 駐車支援システムと呼ばれ、人々がより便利に駐車できるようにするために使用されます。 Lv2 レベルでは、通常、車両には障害物距離警告システムとバックビューカメラが装備されています。
- 第 3 レベル (Lv3): Lv3 レベルでは、指定されたシナリオでの自動駐車を実現できます。たとえば、ガレージに駐車するなどの単純な駐車シナリオです。
- 第 4 レベル (Lv4): Lv3 レベルのすべてのシーンを Lv4 レベルで実行できます。また、車両が障害物に遭遇した場合には、停止または障害物を回避して目的地に戻ることができる。
自動駐車システムの詳細説明
自動駐車システムは現在、主に下図の 3 つの部分で構成されています運転プロセス 、自動駐車プロセス 、および 運転プロセスに戻る を検索します。まず各プロセスの概要を説明し、次に各プロセスの現在の開発傾向を紹介します。
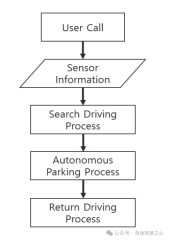
自動駐車システムのワークフロー
探索走行プロセス
探索走行プロセスの最終目標は、駐車場内 車は独自に駐車スペースを見つけることができるため、そのプロセスには 位置決め 、衝突防止 、および 駐車スペース検出テクノロジー が必要です。
測位技術のご紹介
自動駐車システムでは、車両に搭載されているGPSやIMUセンサーを利用して位置を確認することができます。車両の速度と姿勢を測定し、車両の位置推定誤差を修正します。ただし、屋内などの一部のシーンではGPS信号を受信できない場合があります。そのため、自動運転車には支援用のカメラ、ライダー、ミリ波レーダーを搭載する必要がある。下の写真は車両に搭載されているセンサー情報の一部を紹介したものです。
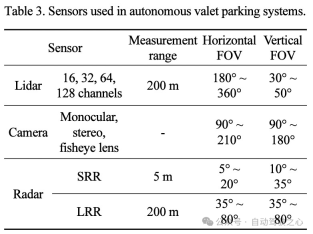
- LiDAR センサーはレーザー光を使用して物体を検出します。現在普及しているライダーは主に 16、32、64、128 ラインのライダーに分かれています。測定範囲は約200メートル、垂直視野は30~50度です。
- カメラセンサーは単眼式、両眼式、魚眼式に大別できます。通常、自動運転車には水平視野が 90 ~ 210 度、垂直視野が 90 ~ 180 度のカメラが搭載されています。
- ミリ波レーダーは距離に基づいて短距離レーダーと長距離レーダーに分類できます。このうち短距離レーダーの射程は約5メートル、水平視野は5~20度、垂直視野は10~35度です。長距離レーダーの射程は約 200 メートル、水平および垂直の視野は 35 ~ 80 度です。
- 衝突防止技術の紹介
自動駐車システムの主な適用シナリオは駐車場であり、多くの車が駐車されているため、衝突防止技術は非常に重要です。衝突防止技術では、超音波センサー、
短波レーダーセンサー、ライダーセンサー、カメラセンサーが主に使用されます。音響センサーとレーダーセンサーは、主に正確な測距を実現するために使用されます。カメラ センサーは主に、連続画像内の同じオブジェクトの位置の違いを使用して、奥行き方向の距離を推定します。 駐車スペース検出テクノロジー
駐車スペースの検出は、検索および運転プロセス中に継続的に実行され、通常は従来のコンピューター ビジョン、ディープ ラーニングが含まれます。および 2 つのメソッドのハイブリッド実装。 従来のコンピュータビジョンでは、下図に示すように、主に駐車スペースライン検出や特徴点検出など、駐車スペースの形状を特定・識別していました。
駐車スペースの形状の例 ディープラーニングの急速な発展のおかげで、現在、CNN ネットワークに基づく手法が駐車スペースの検出に広く使用されています。以下の図は、駐車スペース検出のための代表的な畳み込みニューラル ネットワーク構造を表しています。畳み込み層は入力画像の特徴を学習し、特徴データは全結合層を通じて出力されます。これは完全教師あり学習プロセスであるため、出力はトレーニング データ内のラベルによって直接決定されます。
ディープラーニングの急速な発展のおかげで、現在、CNN ネットワークに基づく手法が駐車スペースの検出に広く使用されています。以下の図は、駐車スペース検出のための代表的な畳み込みニューラル ネットワーク構造を表しています。畳み込み層は入力画像の特徴を学習し、特徴データは全結合層を通じて出力されます。これは完全教師あり学習プロセスであるため、出力はトレーニング データ内のラベルによって直接決定されます。

前のステップを 1 回実行した場合検索運転プロセス中に利用可能な駐車スペースが見つかると、システムは自動駐車プロセスを呼び出します。一般に、自動駐車プロセスを実装するには、パス生成手法を使用します。現在、主流の経路生成手法には、主にアルゴリズムベースの手法と強化学習ベースの手法が含まれます。 アルゴリズムベースのアプローチでは、駐車スペースまでの経路の位置と形状、および車両の現在位置を計算します。適切な駐車経路を計算するために、アルゴリズムには、最適制御問題、グリッドベースの経路計画方法、ランダム ツリーの迅速な探索などのアルゴリズムが含まれます。
強化学習ベースの手法は、自動駐車シミュレーターでの自動駐車プロセスの最適なパスを生成できます。自動駐車シミュレーターでは、車両は一般的な駐車手順を学習します。この学習手法は、下図に示すように、経路生成処理と評価を繰り返すことで、最も駐車精度の高い最適経路を継続的に求めます。

自動駐車の後退駐車プロセス
運転に戻るプロセス
運転に戻るプロセスとは、自動運転車が駐車スペースに入って待機している場合、ユーザーは自動運転車に電話をかけると、ユーザーが指定した場所まで自動運転車を移動させることができる。このプロセスでは、パス追跡テクノロジーを使用する必要があります。
現在、経路追跡技術には、移動経路を追跡する方法と、変更された経路を追跡する方法が含まれています。ただし、どちらの方法も同様の車両制御アルゴリズムを使用しますので、詳しくは論文[1-2]を参照してください。一般的な考え方は、車両の現在位置と舵角の状態を考慮して、生成された経路に沿って車両を移動させる制御コマンドを実行することです。
結論
現在、自動駐車技術に対する需要が高まっているため、さまざまな国やメーカーが自動駐車システムの開発を精力的に行っています。自動駐車技術の急速な発展を考慮して、この記事では、自動駐車システムにおける標準化傾向、評価基準、および自動駐車システムのさまざまなコンポーネントをまとめて詳しく紹介します。
元のリンク: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q


以上が業界標準、トレンド評価、システム導入を統合した自動駐車に関する一般的な調査の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Microsoft Work Trend Index 2025は、職場の容量の緊張を示していますApr 24, 2025 am 11:19 AM
Microsoft Work Trend Index 2025は、職場の容量の緊張を示していますApr 24, 2025 am 11:19 AMAIの急速な統合により悪化した職場での急成長能力の危機は、増分調整を超えて戦略的な変化を要求します。 これは、WTIの調査結果によって強調されています。従業員の68%がワークロードに苦労しており、BURにつながります
 AIは理解できますか?中国の部屋の議論はノーと言っていますが、それは正しいですか?Apr 24, 2025 am 11:18 AM
AIは理解できますか?中国の部屋の議論はノーと言っていますが、それは正しいですか?Apr 24, 2025 am 11:18 AMジョン・サールの中国の部屋の議論:AIの理解への挑戦 Searleの思考実験は、人工知能が真に言語を理解できるのか、それとも真の意識を持っているのかを直接疑問に思っています。 チャインを無知な人を想像してください
 中国の「スマート」AIアシスタントは、マイクロソフトのリコールのプライバシーの欠陥をエコーしますApr 24, 2025 am 11:17 AM
中国の「スマート」AIアシスタントは、マイクロソフトのリコールのプライバシーの欠陥をエコーしますApr 24, 2025 am 11:17 AM中国のハイテク大手は、西部のカウンターパートと比較して、AI開発の別のコースを図っています。 技術的なベンチマークとAPI統合のみに焦点を当てるのではなく、「スクリーン認識」AIアシスタントを優先しています。
 Dockerは、おなじみのコンテナワークフローをAIモデルとMCPツールにもたらしますApr 24, 2025 am 11:16 AM
Dockerは、おなじみのコンテナワークフローをAIモデルとMCPツールにもたらしますApr 24, 2025 am 11:16 AMMCP:AIシステムに外部ツールにアクセスできるようになります モデルコンテキストプロトコル(MCP)により、AIアプリケーションは標準化されたインターフェイスを介して外部ツールとデータソースと対話できます。人類によって開発され、主要なAIプロバイダーによってサポートされているMCPは、言語モデルとエージェントが利用可能なツールを発見し、適切なパラメーターでそれらを呼び出すことができます。ただし、環境紛争、セキュリティの脆弱性、一貫性のないクロスプラットフォーム動作など、MCPサーバーの実装にはいくつかの課題があります。 Forbesの記事「人類のモデルコンテキストプロトコルは、AIエージェントの開発における大きなステップです」著者:Janakiram MSVDockerは、コンテナ化を通じてこれらの問題を解決します。 Docker Hubインフラストラクチャに基づいて構築されたドキュメント
 6億ドルのスタートアップを構築するために6つのAIストリートスマート戦略を使用するApr 24, 2025 am 11:15 AM
6億ドルのスタートアップを構築するために6つのAIストリートスマート戦略を使用するApr 24, 2025 am 11:15 AM最先端のテクノロジーと巧妙なビジネスの洞察力を活用して、コントロールを維持しながら非常に収益性の高いスケーラブルな企業を作成する先見の明のある起業家によって採用された6つの戦略。このガイドは、建設を目指している起業家向けのためのものです
 Googleフォトの更新は、すべての写真の見事なウルトラHDRのロックを解除しますApr 24, 2025 am 11:14 AM
Googleフォトの更新は、すべての写真の見事なウルトラHDRのロックを解除しますApr 24, 2025 am 11:14 AMGoogle Photosの新しいウルトラHDRツール:画像強化のゲームチェンジャー Google Photosは、強力なウルトラHDR変換ツールを導入し、標準的な写真を活気のある高ダイナミックレンジ画像に変換しました。この強化は写真家に利益をもたらします
 Descopeは、AIエージェント統合の認証フレームワークを構築しますApr 24, 2025 am 11:13 AM
Descopeは、AIエージェント統合の認証フレームワークを構築しますApr 24, 2025 am 11:13 AM技術アーキテクチャは、新たな認証の課題を解決します エージェントアイデンティティハブは、AIエージェントの実装を開始した後にのみ多くの組織が発見した問題に取り組んでいます。
 Google Cloud Next2025と現代の仕事の接続された未来Apr 24, 2025 am 11:12 AM
Google Cloud Next2025と現代の仕事の接続された未来Apr 24, 2025 am 11:12 AM(注:Googleは私の会社であるMoor Insights&Strategyのアドバイザリークライアントです。) AI:実験からエンタープライズ財団まで Google Cloud Next 2025は、実験機能からエンタープライズテクノロジーのコアコンポーネント、ストリームへのAIの進化を紹介しました


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

ZendStudio 13.5.1 Mac
強力な PHP 統合開発環境

Dreamweaver Mac版
ビジュアル Web 開発ツール

VSCode Windows 64 ビットのダウンロード
Microsoft によって発売された無料で強力な IDE エディター

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター

SecLists
SecLists は、セキュリティ テスターの究極の相棒です。これは、セキュリティ評価中に頻繁に使用されるさまざまな種類のリストを 1 か所にまとめたものです。 SecLists は、セキュリティ テスターが必要とする可能性のあるすべてのリストを便利に提供することで、セキュリティ テストをより効率的かつ生産的にするのに役立ちます。リストの種類には、ユーザー名、パスワード、URL、ファジング ペイロード、機密データ パターン、Web シェルなどが含まれます。テスターはこのリポジトリを新しいテスト マシンにプルするだけで、必要なあらゆる種類のリストにアクセスできるようになります。
ホットトピック
 7690
7690 15163914139352128725122929
15163914139352128725122929