
ホームページ >テクノロジー周辺機器 >AI >SOTA を超えた MapEX: 驚くべきパフォーマンスの向上とマップレス認識テクノロジー
SOTA を超えた MapEX: 驚くべきパフォーマンスの向上とマップレス認識テクノロジー

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2024-01-10 22:06:221221ブラウズ
以前書いた&著者の個人的な理解
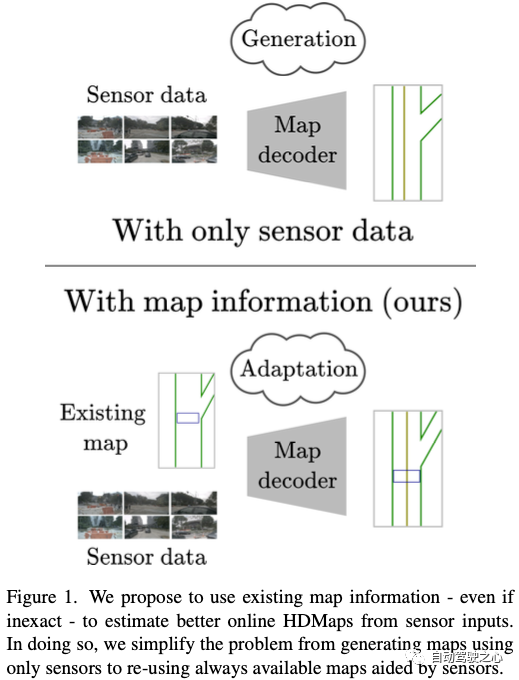
この記事を読んだ後、あなたは絵のない認識が終わったような錯覚を覚えますか? ? ?新しくリリースされた MapEX は、大量の記事のエッセンスを吸収し、それを皆さんと共有するのが待ちきれません。 MapEX の核心は、過去に保存された地図情報を使用して、現在のローカルな高精度地図の構築を最適化することです。過去の地図には、いくつかの単純な地図要素 (道路境界線など) のみが含まれる場合もあれば、ノイズのある地図 (道路境界線など) が含まれる場合もあります。 (各マップ要素の偏差)、5 メートル移動)、または古いマップである可能性があります (たとえば、マップ要素のごく一部のみが現在のシーンと位置合わせできます)。これらの古地図情報が現在の地域高精度地図構築に役立っているのは言うまでもなく、それをどう活用するかというこの記事の核心にもつながります。 ? ?具体的には、MapEX は MapTRv2 に基づいて構築されており、これらの歴史地図情報を一連のクエリにエンコードして元のクエリと結合し、さらにデコーダで予測結果を出力します。この記事はまだ非常に興味深いです~
論文の概要
センサーによって生成されたオンライン高精度マップ (HDMap) は、低コストであると考えられています。従来の手動によるHDMapの取得に代わる技術であるため、HDMapを利用した自動運転システムのコスト削減が期待できるほか、新たなシステムへの適用も可能となります。
この論文では、既存のマップを考慮して最適化することにより、オンライン HDMap 推定を改善する方法を提案します。研究の中で、著者らは、単純な地図、ノイズの多い地図、古い地図を含む 3 つの合理的なタイプの既存の地図を特定しました。さらに、このペーパーでは、既存のマップをセンシングするための MapEX と呼ばれる新しいオンライン HDMap 構築フレームワークを紹介します。 MapEX は、地図要素をクエリとしてエンコードし、従来のクエリベースの地図推定モデルのマッチング アルゴリズムを改善することで、この目標を達成します。
この記事では、最後に、nuScenes データセットにおける MapEX の大幅な改善を示します。たとえば、MapEX (ノイズの多いマップを指定した場合) は、MapTRv2 検出と比較して 38% 向上し、現在の最新技術よりも 16% 優れています。
MapEX の主な貢献をまとめると、次のようになります。
- センサー データに基づいてオンライン HDMap を推定する際に、既存の地図情報を考慮する;
- 既存のマップが不完全である正当なケースについて説明しました。また、nuScenes データセットのこれらのシーンの実用的な実装とコードも提供します。
- では、センサー情報からオンライン HDMap を推定するときにマップと組み合わせることができる、新しいクエリベースの HDMap 取得スキームである MapEX を紹介します。特に、既存のマップ情報と既存の (EX) クエリを組み合わせる新しい方法と、トレーニング中に予測を GT に事前に割り当てることでモデルがこの情報を活用する方法を学習するのを支援する方法が MapEX に導入されました。
オンラインローカル高精度地図構築作業のレビュー
ここでは、自動運転における高精度地図 (HDMaps) に関する内容の一部を簡単に説明します。まず、軌道予測における HDMap の使用について検討し、次にこれらの地図データを取得する方法について説明しました。最後に、オンライン HDMap 構築のプロセスについて説明します。
HDMap による軌道予測 : 自動運転では、多くの場合、車両が移動する世界に関する大量の情報が必要になります。この情報は多くの場合、リッチ HDMap に埋め込まれ、ニューラル ネットワークを変更するための入力として機能します。 HDMap は、軌道予測のパフォーマンスにとって重要であることが証明されています。特に軌道予測では、一部のメソッドは明示的に HDMap の表現に基づいているため、HDMap へのアクセスが絶対に必要です。
HDMap の取得とメンテナンス: 従来の HDMap の取得とメンテナンスのコストは高額です。予測に使用される HDMap は、地図要素 (車線分離線、道路境界線など) を含む単純化されたバージョンにすぎず、完全な HDMap にある複雑な情報の多くを提供しますが、依然として非常に正確な測定が必要です。その結果、多くの企業は、中解像度マップ (MDMaps) やナビゲーション マップ (Google マップ、SDMaps) のそれほど厳格ではない標準に移行しています。重要なのは、数メートルの精度を持つ MDMap が既存のマップの良い例となり、オンライン HDMap 生成プロセスに貴重な情報を提供することです。私たちのマップ シナリオ 2a では、この状況の近似を調査します。
センサーのオンライン HDMap 構築: したがって、オンライン HDMap 構築は、光画像/無画像認識の中核となっています。仮想地図要素、つまり車線の中心線の予測に焦点を当てた研究もあれば、車線分離帯、道路境界線、横断歩道など、より視覚的に識別可能な地図要素に焦点を当てた研究もあります。おそらく視覚要素の方がセンサーで検出しやすいため、後者のアプローチはここ 1 年で急速に進歩しました。興味深いことに、最新のこのような方法である Map-TRv2 は、実際の車線の中心線を検出するための補助設定を提供します。これは、多数の追加のマップ要素 (信号機など) を含む、より複雑なスキームへの収束を示しています。
この論文の作業は、地図内の変化 (交差点など) を検出することを目的とした、一般的に研究されている変化検出問題に似ています。 MapEX の目標は、既存の (おそらく非常に異なる) マップを利用して正確なオンライン HDMap を生成することであり、これは現在のオンライン HDMap 構築の問題に対して達成されます。したがって、マップ内の小さなエラーを修正するだけでなく、あらゆる変更(例:歪んだ線、非常にノイズの多い要素)に対応できる、より表現力豊かなフレームワークも提案しました。
#既存のどのマップを使用できますか?
私たちの中心的な提案は、既存のマップを活用することでオンライン HDMap の構築が容易になるということです。私たちは、不完全な地図が発生する正当な状況が数多くあると考えています。
オンライン HDMap 表現
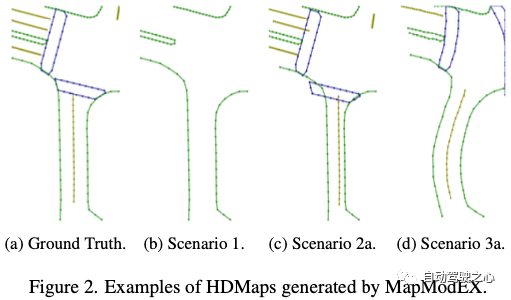
当社では、センサーからの HDMap のオンライン生成に標準形式を採用しています。当社では、HDMap が 3 種類のポリライン、道路境界、車線分離で構成されていると考えています。図 2a に示すように、前の緑、ストーン グレー、青と同じ色の横断歩道で構成されます。
実際の HDMap ははるかに複雑で、より洗練された表現が提案されていますが、この研究の目的は、既存のマップ情報を解釈する方法を調査することです。したがって、私たちは最も研究されているパラダイムを使用します。この論文の成果は、より多くの地図要素、より細かいポリライン、またはラスター化されたターゲットの予測に直接適用できます。
MapModEX: 不完全なマップのシミュレーション
標準マップの取得には費用と時間がかかるため、既存の HDMap から不正確なマップを合成的に生成しました。
この目的のために、私たちは独立した地図変更ライブラリである MapModEX を開発しました。これは、nuScenes マップ ファイルとサンプル レコードを取得し、サンプルごとに、自車両周囲の特定のパッチ内の歩道、境界線、横断歩道のポリライン座標を出力します。重要なのは、MapModEX は、マップ要素の削除、横断歩道の追加、移動、ポイント座標へのノイズの追加、マップの移動、マップの回転、マップの歪みなど、さまざまな変更を反映するためにこれらのポリラインを変更する機能を提供していることです。 MapModEX は、センサーのオンライン HDMap 取得への既存のマップのさらなる再検索を容易にするために、リリース時に利用可能になります。
以下で説明するように、MapModEX パッケージを使用して 3 つの困難なシナリオを実装し、サンプルごとにシナリオ 2 と 3 の 10 個のバリアントを生成しました (シナリオ 1 には 1 つのバリアントのみが許可されます)。トレーニング中のコストを削減し、限られた数のマップ バリアントしか利用できない現実世界の状況を反映するために、修正されたマップの固定セットを使用することを選択しました。
シナリオ 1: 境界線のみが利用可能
最初のシナリオは、図 2b に示すように、大まかな HDMap (分離帯と横断歩道なし) のみが利用できるというものです。道路の境界線は、歩道の端などの 3D の物理的なランドマークに関連付けられることがよくありますが、歩道や横断歩道は、見落としやすい平面マーカーで表されることがよくあります。さらに、横断歩道や車線分離帯は、工事や道路の逸脱により放棄されたり、タイヤの跡で部分的に隠れたりすることがよくあります。
したがって、境界線のみを含む HDMap を使用するのが合理的です。この利点は、道路制約のラベル付けのみが必要なため、ラベル付けのコストを削減できることです。さらに、道路の境界だけを特定する場合、精度の低い機器や更新が必要になる場合があります。実装 実用的な観点から見ると、シナリオ 1 の実装は簡単です。利用可能な HDMap から仕切り線と横断歩道を削除します。
シナリオ 2: ノイズの多いマップ
2 番目に考えられるシナリオは、図 2c に示すように、非常にノイズの多いマップしかない場合です。既存の HDMap の弱点の 1 つは、高精度 (数センチメートル程度) が必要なことであり、その取得とメンテナンスに大きなプレッシャーがかかっています [11]。実際、HDMaps と新たな MDMaps 標準の主な違いは、精度が低いことです (数メートルに対して数センチメートル)。
したがって、安価な取得プロセスまたは代わりに MDMaps 標準を使用することによってマップの精度が低下する可能性がある状況をシミュレートするには、ノイズの多い HDMaps を使用することをお勧めします。さらに興味深いのは、これらの精度の低いマップがセンサー データから自動的に取得できることです。 MapTRv2 のような手法は非常に優れたパフォーマンスを達成していますが、まだ完全に正確ではありません。非常に柔軟な検索しきい値を使用しても、予測精度は 80% を大きく下回ります。
実装: 精度が不足する可能性があるさまざまな条件を反映するために、これらのノイズの多い HDMap の 2 つの可能な実装を提案します。最初のシナリオ 2a では、マップ要素の位置ごとに、標準偏差 1 メートルのガウス分布からのノイズを追加するオフセット ノイズ セットアップを提案します。これには、すべての地図要素 (境界線、境界線、横断歩道) に均一な変換を適用する効果があります。このような設定は、ヒューマン アノテーターがノイズの多いデータから不正確なアノテーションを迅速に提供する状況の適切な近似を提供するはずです。数メートルの精度の MDMaps 標準を反映するために、標準偏差 1 メートルを選択しました。
次に、非常に困難な点ごとのノイズ シナリオ 2b でメソッドをテストします。グラウンド トゥルース ポイントごとに、マップ要素が 20 個のそのような点で構成されていることを思い出してください。標準的なノイズから開始します。ノイズは、ガウス分布からサンプリングされます。 5 メートルのバイアスがポイント座標に追加されます。これは、マップが自動的に位置を取得したり、非常に不正確な位置を提供したりする状況に対する最悪の近似値を提供します。
シナリオ 3: 地図が大幅に変更される
検討する最後のシナリオは、過去に正確だった古い地図にアクセスできる場合です (図 2d を参照)。 。横断歩道などの標識が時々変わるのはよくあることです。さらに、市は、新しいアトラクションによる交通量の増加に対応するために、いくつかの問題のある交差点を大幅に改修したり、エリアを改修したりしました。
したがって、HDMap を操作するのは興味深いことです。HDMap はそれ自体は有効ですが、実際の HDMap とは大きく異なります。 HDMap がコストを抑えるために保守担当者によって数年ごとにのみ更新されていたとき、これらのマップは定期的に表示されるべきでした。この場合、既存の地図は世界に関する情報を提供しますが、一時的または最近の変更が反映されていない可能性があります。
実装: シナリオ 3a で既存の HDMap に強力な変更を加えることで、これを近似します。マップ内の横断歩道と車線分離帯の 50% を削除し、いくつかの横断歩道 (残りの横断歩道の半分) を追加し、最後にマップに小さなワープを適用しました。
ただし、地球地図の大部分は時間が経っても変化しないことに注意することが重要です。これをシナリオ 3b でカウントします。シナリオ 3b では、摂動バージョンの代わりに実際の HDMap を考慮するために (確率 p = 0.5 で) ランダムに選択した場合の影響を調査します。
MapEX: 既存のマップの利用
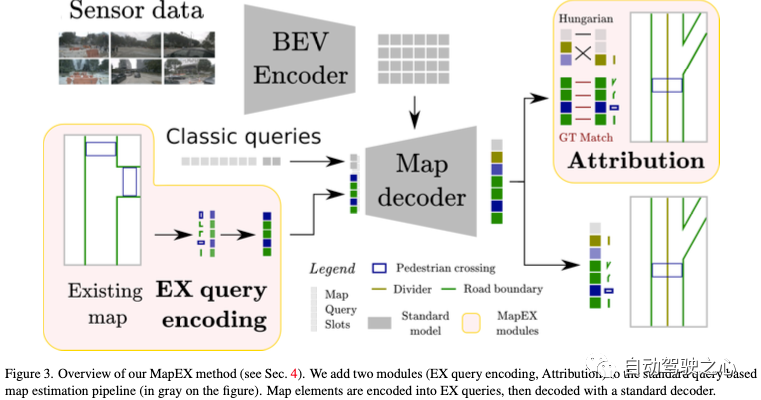
この目的のために、オンライン HDMap 構築のための新しいフレームワークである MapEX (図 3 を参照) を提案します。標準的なクエリベースのオンライン HDMap 構築パラダイムに従い、マップ クエリ エンコード モジュールと予測および GT 事前帰属スキームという 2 つの主要なモジュールを通じて既存の地図情報を処理します。この記事では、MapTRv2 に基づいてベースラインを構築します。
#概要
クエリベースのコアは、図 3 の灰色の要素で示されています。まずセンサー入力 (カメラまたは LIDAR) を取得し、それをセンサー機能として鳥瞰図 (BEV) 表現にエンコードします。 DETR のような検出スキームを使用してマップ要素 (最大 N) を検出し、マップ自体を取得します。これは、N×L 個の学習済みクエリ トークン (N は検出された要素の最大数、L は要素に対して予測されたポイントの数) を Transformer デコーダに渡すことによって実現されます。Transformer デコーダは、クロスアテンション フィード センサーと同じ BEV 機能を使用します。情報をクエリトークンに追加します。デコードされたクエリは、クラス予測 (追加の背景クラスを含む) とともに線形レイヤーを介してマップ要素の座標に変換され、L 個のクエリ グループがマップ要素の L 点 (この論文では L=20) を表すようになります。トレーニングは、ハンガリーのアルゴリズムの変形を使用して、予測されたマップ要素と GT マップ要素を照合することによって行われます。一致すると、回帰 (座標の場合) および分類 (要素カテゴリの場合) 損失を使用して、予測されたマップ要素が応答する GT と一致するようにモデルが最適化されます。 しかし、このフレームワークは既存のマップを解釈できないため、2 つの主要なレベルで新しいモジュールを導入する必要があります。クエリ レベルでは、マップ要素を学習不可能な EX クエリにエンコードします。マッチング レベルでは、クエリ属性を、それが表す GT マップ要素の先頭に追加します。 完全な MapEX フレームワーク (図 3 を参照) は、既存のマップ要素を学習不可能なマップ クエリに変換し、特定のクエリ数 N×L に達するまで学習可能なクエリを追加します。この完全なクエリ セットは Transformer デコーダに渡され、通常どおり線形レイヤーを介して予測に変換されます。トレーニング時に、アトリビューション モデルは一部の予測を GT に事前照合し、残りの予測は通常、ハンガリー マッチングを使用して照合されます。テスト時に、デコードされた非バックグラウンド クエリによって HDMap 表現が生成されます。マップを EX クエリに変換する
現在のオンライン HDMap 構築フレームワークには、既存のマップ情報を解釈するメカニズムがありません。したがって、既存のマップを標準のクエリベースのオンライン HDMap 構築フレームワークで理解できる形式に変換できる新しいスキームを設計する必要があります。図 4 に示すように、MapEX を使用して既存のマップ要素をデコーダ用の EX クエリにエンコードする簡単な方法を提案します。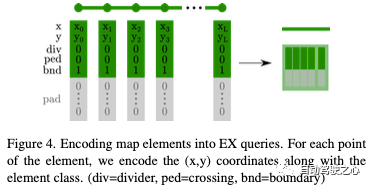
指定されたマップ要素について、L 個の等距離点を抽出します。L は、任意のマップ要素について予測しようとする点の数です。各ポイントについて、最初の 2 次元でそのマップ座標 (x,y) をエンコードし、次の 3 次元でマップ要素クラス (分周器、交差点、または境界) をエンコードする EX クエリを作成します。ワンタイム コーディングを実行します。 EX クエリの残りの部分には、デコーダ アーキテクチャで使用される標準クエリ サイズを実現するために 0 が埋め込まれます。
このクエリの設計は非常にシンプルですが、対象の情報 (ポイント座標と要素クラス) を直接エンコードし、学習されたクエリとの競合を最小限に抑えるという重要な利点があります (豊富な 0 パディングのおかげで)。
L 個のクエリ (既存のマップ内のマップ要素用) のセットを取得したら、標準の学習可能なクエリ プールから L 個の分類学的学習可能なクエリのセットを取得 () できます。次に、この記事の方法に従って、生成された N×L クエリがデコーダに供給されます。MapTR では、N×L クエリは独立したクエリとして扱われますが、MapTRv2 はより効果的な分離されたアテンション スキームを使用して同じマップ要素を結合します。のクエリがグループ化されます。クエリからマップ要素を予測した後、それらをテスト時に直接使用することも、トレーニングされた GT と照合することもできます。
マップ要素の属性
EX クエリは既存のマップ情報を解釈する方法を導入しますが、モデルがこれらのクエリを正しく使用して対応する要素を推定することを保証するものは何もありません。 。実際、単独で使用した場合、ネットワークは完全に正確な EX クエリさえ認識しません。したがって、図 3 に示すように、トレーニングで従来のハンガリー語マッチングを使用する前に、予測要素と GT 要素の事前帰属を導入します。
簡単に言えば、変更されたマップ内の各マップ要素がどの GT マップ要素に対応するかを追跡します。マップ要素が変更、シフト、または歪んでいない場合は、マップ要素をマップ要素と比較できます。元のマップ要素に関連付けられた実際のマップ。モデルが有用な情報のみを使用できるようにするため、変更されたマップ要素と実際のマップ要素の間のポイントごとの平均変位スコアが次の場合にのみ一致を維持します。

given GT と事前予測されたマップ要素の間の対応を決定すると、一致する要素のプールから事前に属性付けされたマップ要素を削除できます。残りのマップ要素 (予測と GT) は、通常どおり、ハンガリーのアルゴリズムのバリエーションを使用して照合されます。したがって、ハンガリー語のマッチング ステップでは、存在しない追加マップ要素にどの EX クエリが対応するかを特定し、(削除または強い摂動により) 実際のマップには存在しないいくつかの実際のマップ要素に適合する標準学習クエリを見つけるだけで済みます。 。
ハンガリーアルゴリズムが処理しなければならない要素の数を減らすことは重要です。なぜなら、最も効率的なアルゴリズムであっても 3 次複雑さ ()[8] があるからです。予測されるマップは小さく (30m × 60m)、予測されるマップ要素は 3 種類のみであるため、これは現在のほとんどのオンライン HDMap 取得方法の大きな弱点ではありません。しかし、オンライン マップ生成がさらに発展するにつれて、予測マップがより大きく、より完全になるにつれて、より多くのマップ要素に対応する必要が生じます。
実験結果
セットアップ: オンライン HDMap 推定の標準評価データセットである nuScenes データセットで MapEX フレームワークを評価しました。 MapTRv2 フレームワークと公式コード ベースに基づいています。一般的な手法に従って、さまざまな取得しきい値 (0.5 m、1.0 m、および 1.5 m の面取り距離) での 3 つの地図要素タイプ (ディバイダー、境界、交差点) の平均精度と、3 つのカテゴリの mAP を報告します。
各実験では、3 つの固定ランダム シードを使用して 3 つの実験が実行されました。重要なのは、シードとマップ シーンの特定の組み合わせについて、比較を容易にするために検証中に提供される既存のマップ データが固定されていることです。一貫性を保つため、標準偏差がこの精度を超えている場合でも、結果を平均値 ± 標準偏差として最も近い小数点まで報告します。
MapEX のパフォーマンス
表 2 に関連する方法の比較と、MapEX のパフォーマンスを示します。車線分離帯や横断歩道のない地図 (S1)、ノイズの多いマップ (シフトされたマップ要素の場合は S2a、強い点ごとのノイズの場合は S2b)、および大きな変更のあるマップ (S3a にはこれらのマップのみが含まれ、S3b には混合実マップが含まれます)。私たちは、MapEX のパフォーマンスを、同等の設定 (カメラ入力、CNN バックボーン) での既存のオンライン HDMap 評価、および現在の最先端 (大幅に多くのリソースを使用する) と徹底的に比較します。
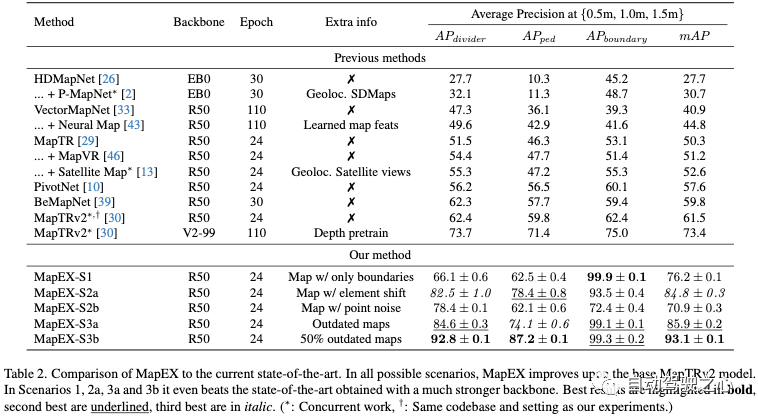
まず、表 2 から、考慮されているシナリオに関係なく、どのような種類の既存の地図情報でも MapEX が同等の設定で既存の文献よりも大幅に優れたパフォーマンスを発揮することが明らかです。 1 つのケースを除くすべてのケースで、既存の地図情報により、MapEX は現在の最先端の MapTRv2 モデルよりも優れたパフォーマンスを発揮することができました。MapTRv2 モデルは、2 倍の期間で 4 回のトレーニングで広範な深度推定データセットで事前トレーニングされた大規模な ViT バックボーンを使用します。 。マップ要素の位置が不正確なかなり保守的な S2a シナリオでも、11.4mAP スコアが向上しました (つまり 16%)。
すべてのシナリオにおいて、4 つのすべての指標において、基本の MapTRv2 モデルと比較して一貫した改善が見られます。当然のことながら、シナリオ 3b (正確な既存のマップを半分の時間で使用) は、全体的なパフォーマンスが大幅に向上し、完全に正確な既存のマップを特定して活用する強力な能力を示しました。シナリオ 2a (オフセット マップ要素を含む) とシナリオ 3a (「古い」マップ要素を含む) は両方とも、非常に強力な全体的なパフォーマンスを提供し、3 種類のマップ要素すべてで良好なパフォーマンスを示します。シナリオ 1 では、道路の境界のみが利用可能であり、巨大なことが示されています。 (予想される) 非常に強力な境界取得により、mAP は向上します。標準偏差 5 メートルのガウス ノイズが各マップ要素点に適用される、非常に困難なシナリオ 2b においても、ベース モデルに対して大幅な向上が得られ、
#MapEX による改善点
ここでは、既存の地図情報によって MapEX にもたらされた改善点に特に焦点を当てます。 MapEX のゲインを、他の追加情報ソースによってもたらされるゲインと比較します: グローバルに学習された特徴マップを備えたニューラル マップ プライオリティ、および SDMaps のローカライズに geo P-MapNet を使用します。重要なのは、MapModEX はこれらの方法よりも強力な基本モデルに依存していることです。ベース モデルを改善するのは難しくなりますが、高スコアの達成も容易になります。不公平な利点を避けるために、絶対スコアを表 3 に示します。表 3 から、MapEX を使用すると次のことがわかります。どのタイプの既存のマップでも、全体的な mAP ゲインを高めるために、他の追加情報ソース (P-MapNet 設定を含む) よりも複雑な P-MapNet が生成されます。車線分離帯と道路境界線の両方でモデルの検出パフォーマンスが大幅に向上していることが観察されます。わずかな例は、シナリオ 1 (道路境界へのアクセスのみ) で、モデルは境界上の地図情報を地上で保存することに成功しますが、事前情報のない 2 つの地図要素については、以前の方法と比べて同等の改善が得られるだけです。シナリオ 1 と 2b (各マップ ポイントに非常に破壊的なノイズを適用する) では、既存の技術に比べて同等の改善しか得られないため、既存のマップからのより正確な情報が必要です。シナリオ 2a (要素が変更されました) とシナリオ 3a (マップは「古い」です) ") 高い横断歩道検出スコアが得られます。これは、これら 2 つのシーンにより正確な横断歩道情報が含まれているためである可能性があります。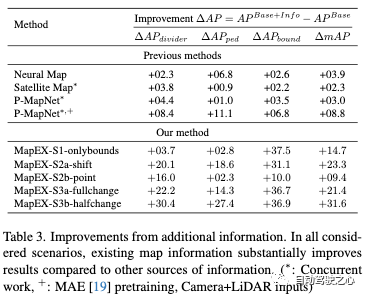
アブレーション実験
MapEX 入力の貢献表 4 は、さまざまなタイプの入力 (既存のマップ、マップ要素の対応、センサー入力) が MapEX にどのような影響を与えるかを示しています。既存のマップはパフォーマンスを大幅に向上させます。 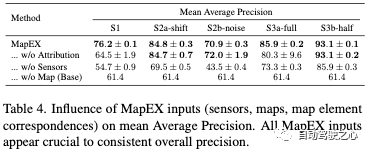 # EX クエリ エンコーディングについて
# EX クエリ エンコーディングについて
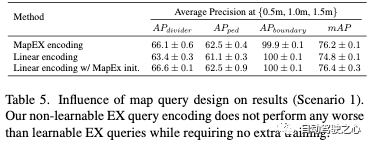
表 5 は、学習された EX クエリのパフォーマンスが、単純な学習不可能な EX クエリよりもはるかに低いことを示しています。興味深いことに、学習不可能な値で初期化すると、学習された EX クエリは非常に小さな改善につながる可能性があります。
 グラウンド トゥルース アトリビューション
グラウンド トゥルース アトリビューション
以前の理由により、既存の情報を最大限に活用するには、マップ要素の属性を決定することが重要です。したがって、MapEX のようにフィルタリングするのではなく、対応するすべてのマップ要素の属性を事前に決定する方が簡単かもしれません。表 6 は、既存のマップ要素があまりにも異なる場合、対応関係を破棄した方が実際に無差別帰属よりも優れたパフォーマンスにつながることを示しています。基本的に、これは、既存のマップ要素がグラウンド トゥルースと大きく異なる場合、MapEX は EX クエリではなく学習可能なクエリを使用する方がよいことを示唆しています。
ディスカッション
この記事では、既存のマップを活用してオンライン HDMap の構築を改善することを提案します。これを調査するために、著者らは、既存の (単純、ノイズが多い、または古い) マップが利用可能な 3 つの現実的なシナリオを概説し、これらのマップを活用するための新しい MapEX フレームワークを紹介します。現在のフレームワークには既存のマップを考慮するメカニズムがないため、マップ要素を EX クエリにエンコードするモジュールと、モデルがこれらのクエリを確実に利用するようにするモジュールの 2 つの新しいモジュールを開発しました。
実験結果は、既存のマップがオンライン HDMap 構築のための重要な情報を表し、MapEX がすべてのケースにおいて同等の方法を大幅に改善することを示しています。実際、mAP (マップ要素がランダムに移動するシナリオ 2a) に関しては、基本の MapTRv2 モデルと比較して 38%、現在の最先端モデルと比較して 16% 向上しています。
この研究が、既存の情報を解釈するための新しいオンライン HDMap 構築方法につながることを願っています。既存のマップは、良くも悪くも広く入手可能です。それらを無視することは、信頼できるオンライン HDMap ビルドを探す上で重要なツールを放棄することになります。

元のリンク: https://mp.weixin.qq.com/s/FMosLZ2VJVRyeCOzKl-GLw
以上がSOTA を超えた MapEX: 驚くべきパフォーマンスの向上とマップレス認識テクノロジーの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。