



マルチモーダル大規模言語モデルにおける視覚情報の抽出が不十分であるという問題に対処するために、ハルビン工業大学 (深セン) の研究者は、二重層の知識を強化したマルチモーダル大規模言語モデルを提案しました。 JiuTian-ライオン)。
書き直す必要がある内容は次のとおりです: 論文リンク: https://arxiv.org/abs/2311.11860
GitHub: https://github.com/rshaojimmy/JiuTian
プロジェクト ホームページ: https://rshaojimmy.github.io/Projects/JiuTian-LION
既存の研究と比較して、Jutian は画像レベルの理解タスクと地域レベルの位置決めタスクの間の内部矛盾を初めて分析し、セグメント化された命令の微調整戦略とハイブリッドを提案しました。タスクの相互推進を両立するアダプタ。
きめ細かい空間認識と高レベルの意味論的な視覚知識を注入することにより、Jutian は、画像の説明、視覚的な問題、視覚的なローカライゼーションを含む 17 の視覚言語タスクで大幅なパフォーマンスの向上を達成しました。たとえば、視覚的空間推論では最大 5% のパフォーマンス向上が見られ、13 の評価タスクにおいて国際トップレベルに達しています。パフォーマンスの比較を図 1 に示します。

図 1: 他の MLLM と比較して、Juitian はほとんどのタスクで最適なパフォーマンスを達成しました。
九天JiuTian-LION
大規模言語モデル (LLM) にマルチモーダル認識機能を提供することで、マルチモーダル大規模言語モデル (MLLM) を生成する取り組みが始まりました。多くの視覚言語タスクにおいて画期的な進歩を遂げました。ただし、既存の MLLM は主に、CLIP-ViT
などの画像とテキストのペアで事前トレーニングされたビジュアル エンコーダを使用します。これらのビジュアル エンコーダの主なタスクは、粗粒度の画像を学習することです。テキストモダリティは調整されていますが、詳細な視覚的理解を実現するための包括的な視覚認識と情報抽出機能が欠けています
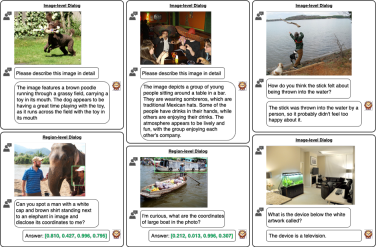
この視覚情報の抽出と理解は、ほとんどの場合不十分です。図 2

#に示すように、問題が不十分であると、視覚的位置特定バイアス、不十分な空間推論、物体の幻覚など、MLLM に複数の欠陥が発生します。図 2: JiuTian-LION は、二重層の視覚的知識で強化されたマルチモーダル大規模言語モデルです
JiuTian-LION を既存のマルチモーダル大規模言語モデル (MLLM) と比較します。きめの細かい空間認識の視覚的知識と高レベルの意味論的な視覚的証拠を注入することにより、MLLM の視覚理解能力を効果的に向上させ、より正確なテキスト応答を生成し、MLLM の幻覚現象を軽減します
二重層視覚知識強化マルチモーダル大規模言語モデル-JiuTian-LION
視覚情報の抽出と理解における MLLM の問題を解決するにはこの側面の欠点を解決するために、研究者らは、JiuTian-LION と呼ばれる 2 層の視覚的知識を強化した MLLM 手法を提案しました。具体的な手法のフレームワークを図 3 に示します。
この手法は、主に 2 つの側面から MLLM を強化し、きめの細かい空間認識視覚知識を段階的に統合します (きめの細かい空間認識の漸進的組み込み)視覚的な知識)と、ソフト プロンプトの下での高レベルのセマンティックな視覚的証拠のソフト プロンプト。
具体的には、研究者らは、画像レベルの理解タスクと領域レベルの位置特定タスクの間の内部矛盾を解決するために、セグメント化された命令の微調整戦略を提案しました。彼らは、MLLM に粒度の細かい空間認識の知識を徐々に注入します。同時に、高レベルの意味論的な視覚的証拠として画像ラベルを MLLM に追加し、ソフト ヒンティング手法を使用して、誤ったラベルによる潜在的な悪影響を軽減しました。 九天(JiuTian-LION) モデルのフレームワーク図は次のとおりです:
この作業では、セグメント化されたトレーニング戦略を使用して、まず Q-Former および Vision Aggregator-MLP ブランチに基づいてそれぞれ画像レベルの理解と地域レベルの測位タスクを学習し、次に、ルーティング メカニズムを備えたハイブリッド アダプターを利用します。最終トレーニング段階 2 つのタスクに関する知識向上モデルのさまざまなブランチのパフォーマンスを動的に統合します。
#この研究では、RAM を介して高レベルのセマンティックな視覚的証拠として画像タグも抽出し、高レベルのセマンティック インジェクションの効果を向上させるためのソフト プロンプト手法を提案します
きめ細かい空間認識視覚知識の漸進的融合
画像レベルの理解タスク (画像の説明と視覚的な質問を含む) を直接組み合わせる場合単一ステージのハイブリッド トレーニングを実行する場合、MLLM は 2 つのタスク間で内部矛盾に遭遇するため、すべてのタスクで全体的に良好なパフォーマンスを達成することはできません。
研究者らは、この内部対立は主に 2 つの問題によって引き起こされていると考えています。最初の問題は、地域レベルのモーダル アライメントの事前トレーニングが不足していることです。現在、地域レベルの測位機能を持つほとんどの MLLM は、まず事前トレーニングに大量の関連データを使用します。そうでない場合は、画像レベルの測位機能を使用することが困難になります。限られたトレーニングリソースに基づいたモーダルアライメント 地域レベルのタスクへの視覚的特徴の適応。
もう 1 つの問題は、画像レベルの理解タスクと領域レベルの位置特定タスクの間の入出力パターンの違いです。後者では、モデルがオブジェクトの座標に関する特定の短い文をさらに理解する必要があります (  形式で始まります)。上記の問題を解決するために、研究者らは、セグメント化された命令の微調整戦略とルーティング機構を備えたハイブリッドアダプターを提案しました。
形式で始まります)。上記の問題を解決するために、研究者らは、セグメント化された命令の微調整戦略とルーティング機構を備えたハイブリッドアダプターを提案しました。
図 4 に示すように、研究者は 1 段階の命令微調整プロセスを 3 つの段階に分割しました。
ViT、Q を使用- グローバルな視覚知識の画像レベルの理解タスクを学習するための元および画像レベルのアダプター; ビジョン アグリゲーター、MLP、および地域レベルのアダプターを使用して、きめの細かい空間認識視覚知識の地域レベルの位置決めタスクを学習する; ハイブリッドを提案する異なるブランチを動的に統合するためのルーティング メカニズムを備えたアダプター さまざまな粒度で学習された視覚的な知識。表 3 は、単一ステージのトレーニングに対するセグメント化された命令の微調整戦略のパフォーマンス上の利点を示しています。

図 4: セグメント化された命令の微調整戦略

ソフト プロンプトの下で挿入される高レベルのセマンティックな視覚的証拠については、書き換えが必要です
#研究者らは、MLLM の全体的な視覚認識の理解能力をさらに強化するために、高レベルの意味論的な視覚的証拠を効果的に補足するものとして画像ラベルを使用することを提案しています。 #Specific たとえば、最初に RAM を介してイメージ タグを抽出し、次に特定のコマンド テンプレート「に従って、次のタグの使用または部分的な使用が許可されています:」を使用してイメージ タグをラップします。コマンド テンプレートの「」は、学習可能なソフト プロンプト ベクトルに置き換えられます。
テンプレート内の特定のフレーズ「使用または部分的に使用」と組み合わせると、ソフト ヒント ベクトルは、誤ったラベルによる潜在的な悪影響を軽減するようにモデルをガイドできます。
研究者らは、画像キャプション (画像キャプション)、視覚的質問応答 (VQA)、および有向表現理解 (REC) を組み込みました。 17 のタスク ベンチマーク セットで評価されました。
実験結果は、Juiutian が 13 の評価セットで国際トップレベルに到達したことを示しています。特に、InstructBLIP や Shikra と比較して、Jutian は画像レベルの理解タスクと領域レベルの位置決めタスクでそれぞれ包括的かつ一貫したパフォーマンスの向上を達成しており、視覚空間推論 (VSR) タスクでは最大 5% の向上を達成できます。
図 5 からわかるように、さまざまな視覚言語マルチモーダル タスクにおける Jiutian と他の MLLM の能力には差があり、きめ細かい視覚的理解と視空間推論能力において Jiutian の方が優れていることがわかります。また、錯覚を少なくしてテキスト応答を出力できるようになります。

#書き換えられた内容は次のとおりです。 5 番目の図は、9 日間の大規模モデルへの応答を示しています。 InstructBLIP と Shikra の能力差の定性分析
図 6 は、サンプル分析を通じて、Juitian モデルが画像レベルと地域レベルの両方の視覚言語タスクにおいて優れた理解および認識能力を備えていることを示しています。
6 番目の図: より多くの例の分析を通じて、画像と地域レベルの視覚的な観点から Jiutian 大型モデルの機能が実証されています。理解
#概要(1) この研究は、新しいマルチモーダル大規模言語モデル - Jiutian: 二重層の視覚的知識によって強化されたモデルを提案します。マルチモーダルな大規模言語モデル。
(2) この作業は、画像説明、視覚的質問応答、指示表現の理解などを含む 17 の視覚言語タスク ベンチマーク セットで評価され、そのうち 13 の評価セットが現在の最高のパフォーマンスに達しました。
(3) この研究では、画像レベルの理解タスクと領域レベルのローカリゼーションタスクの間の内部矛盾を解決するためのセグメント化された命令の微調整戦略を提案し、タスク間の 2 つの相互改善を実装します
(4) この研究では、画像レベルの理解と地域レベルの位置決めタスクをうまく統合して、視覚的なシーンを複数のレベルで包括的に理解することができ、この包括的なアプローチは将来的にも使用できます。具現化されたインテリジェントなシナリオに適用されることで、ロボットが現在の環境をより適切かつ包括的に識別して理解し、効果的な意思決定を行えるようになります。
以上が13 の視覚言語タスクを完了してください!ハルビン工業大学、性能が5%向上したマルチモーダル大型モデル「Jiutian」をリリースの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Excelで複製を削除する方法は? - 分析VidhyaApr 15, 2025 am 09:20 AM
Excelで複製を削除する方法は? - 分析VidhyaApr 15, 2025 am 09:20 AMデータの整合性:正確な分析のためにExcelで重複を削除します クリーンデータは、効果的な意思決定には非常に重要です。 Excelスプレッドシートの複製エントリは、エラーや信頼できない分析につながる可能性があります。このガイドは、DUPを簡単に削除する方法を示しています
 トップ10の電話インタビューのヒント - 分析VidhyaApr 15, 2025 am 09:19 AM
トップ10の電話インタビューのヒント - 分析VidhyaApr 15, 2025 am 09:19 AM電話インタビューの芸術をマスターする:成功へのあなたのガイド 電話インタビューを成功させると、求人プロセスの次の段階に進む可能性が大幅に増加する可能性があります。 この重要な第一印象は、多くの場合唯一のfacです
 統計学者になる方法は?Apr 15, 2025 am 09:15 AM
統計学者になる方法は?Apr 15, 2025 am 09:15 AM導入 ヘルスケア、金融、スポーツなどの分野で自分とあなたの会社のために情報に基づいた決定を下す力を持っていることを想像してください。それが統計学者の役割です。 組織でのデータの使用の増加に伴い、統計学者の需要
 AIはどのように機能しますか? - 分析VidhyaApr 15, 2025 am 09:14 AM
AIはどのように機能しますか? - 分析VidhyaApr 15, 2025 am 09:14 AM人工知能:包括的なガイド テクノロジーにより、マシンが私たちの好みを理解し、私たちのニーズを予測し、過去の相互作用から学び、より良い結果を提供する世界を想像することができました。これはサイエンスフィクションではありません。その
 Pictogramグラフとは何ですか? - 分析VidhyaApr 15, 2025 am 09:09 AM
Pictogramグラフとは何ですか? - 分析VidhyaApr 15, 2025 am 09:09 AM導入 データ分析の世界では、効果的なコミュニケーションが重要です。 Pictogramグラフは強力なソリューションを提供し、視覚的に魅力的で簡単に消化可能な形式で情報を提示します。複雑なチャートや図、絵文字も異なります
 llama-3.1-storm-8b:8b LLMはメタとエルメスを上回るApr 15, 2025 am 09:08 AM
llama-3.1-storm-8b:8b LLMはメタとエルメスを上回るApr 15, 2025 am 09:08 AMLlama 3.1 Storm 8b:効率的な言語モデルのブレークスルー 効率的で正確な言語モデルの追求により、80億パラメーターモデルカテゴリの大幅な進歩であるLlama 3.1 Storm 8Bの開発が発生しました。 これは洗練されています
 Gitのインストール方法は? - 分析VidhyaApr 15, 2025 am 09:07 AM
Gitのインストール方法は? - 分析VidhyaApr 15, 2025 am 09:07 AMGit:バージョン制御とコラボレーションへの本質的なガイド GITは、開発者にとって重要なツールであり、プロジェクトのコラボレーションとバージョン制御を簡素化します。 このガイドは、Linux、MacOS、およびWindにGitをインストールするための簡単な手順を提供します
 LLMSでのツール呼び出しApr 14, 2025 am 11:28 AM
LLMSでのツール呼び出しApr 14, 2025 am 11:28 AM大規模な言語モデル(LLM)は人気が急増しており、ツールコール機能は単純なテキスト生成を超えて機能を劇的に拡大しています。 これで、LLMSは動的なUI作成や自律的なaなどの複雑な自動化タスクを処理できます。


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

ドリームウィーバー CS6
ビジュアル Web 開発ツール

Safe Exam Browser
Safe Exam Browser は、オンライン試験を安全に受験するための安全なブラウザ環境です。このソフトウェアは、あらゆるコンピュータを安全なワークステーションに変えます。あらゆるユーティリティへのアクセスを制御し、学生が無許可のリソースを使用するのを防ぎます。

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

MantisBT
Mantis は、製品の欠陥追跡を支援するために設計された、導入が簡単な Web ベースの欠陥追跡ツールです。 PHP、MySQL、Web サーバーが必要です。デモおよびホスティング サービスをチェックしてください。

WebStorm Mac版
便利なJavaScript開発ツール

