
ホームページ >テクノロジー周辺機器 >AI >Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。
Samsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWB転載
- 2023-11-27 12:58:49729ブラウズ
(Nweon 2023 年 11 月 27 日) 以前の情報によると、Samsung は完全なメタバース戦略を策定し、Samsung 中心の XR エコシステムの構築を目指しており、人材を積極的に採用しています。特許出願によると、同社は実際に究極のブレイン・コンピューター・インターフェースを検討しているという。
かつては、ブレイン コンピューター インターフェイスの研究は、Meta、Valve、その他の新興企業の間でより一般的でした。もちろん、マイクロソフトのような企業もそれを検討しています。現在、XR 分野に積極的に展開している企業は、より高度なブレイン コンピューター インターフェイスを模索し始めています。 Samsung は、「情報生成方法および装置」というタイトルの特許出願で、ブレイン コンピューター インターフェイスを XR 感覚フィードバック刺激の分野に適用することを提案しました。
同社では、XR 技術では主にセンサーをベースにさまざまな感覚シミュレーションを実装すると考えています。しかし、各感覚シミュレーションはセンサーを介して実現されるため、プロセスが煩雑です。さらに、センサーは十分に包括的ではないため、多くのシミュレーションを実装できません。言い換えれば、関連するセンサーを使用して得られる効果は現実とはかけ離れており、ユーザーは現実的なシミュレーションを得ることができません。したがって、サムスンは、ブレイン コンピューター インターフェイス デバイスを使用して現実的な感覚シミュレーションを提供できることを提案しています。その中で、システムは、仮想環境内の対象オブジェクトに対するユーザーの位置に関する情報を取得し、位置情報と属性情報に基づいて対象オブジェクトに対応する感覚情報を決定し、最終的に感覚情報を電気信号に変換し、それらをブレインコンピュータインターフェースデバイスに通してユーザーを刺激します。
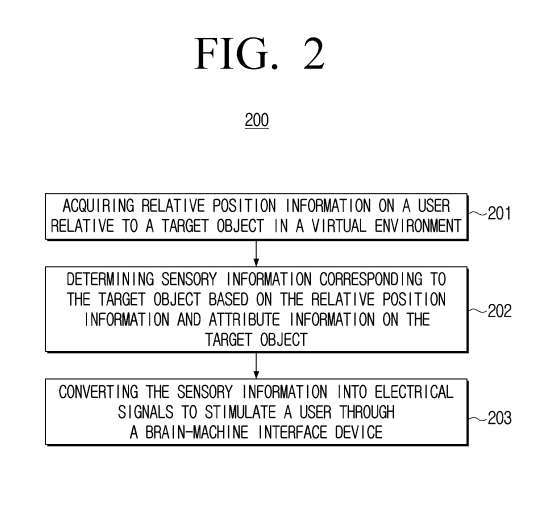 ### 例示的な実施形態による、図2は関連情報生成フローチャート200を示す。情報生成方法は、仮想環境における対象オブジェクトに対するユーザの相対位置情報を取得する動作201##を含む。
### 一実施形態では、互いに協働して動作する1つまたは複数のデバイスを実行エンティティと呼ぶことができる。実行エンティティは、空間直交座標系を確立し、直交座標系におけるユーザーの位置情報と仮想環境内の対象オブジェクトの位置情報をリアルタイムで取得し、ユーザーの位置情報と対象オブジェクトの位置情報に基づいて決定を行うことができる。対象物体に対するユーザの相対位置情報。
### 例示的な実施形態による、図2は関連情報生成フローチャート200を示す。情報生成方法は、仮想環境における対象オブジェクトに対するユーザの相対位置情報を取得する動作201##を含む。
### 一実施形態では、互いに協働して動作する1つまたは複数のデバイスを実行エンティティと呼ぶことができる。実行エンティティは、空間直交座標系を確立し、直交座標系におけるユーザーの位置情報と仮想環境内の対象オブジェクトの位置情報をリアルタイムで取得し、ユーザーの位置情報と対象オブジェクトの位置情報に基づいて決定を行うことができる。対象物体に対するユーザの相対位置情報。
#### ステップ202では、対象物の相対位置情報および属性情報に基づいて、対象物体に対応する感覚情報を決定する。
###例示的な実施形態によれば、実行エンティティは、仮想環境内のターゲットオブジェクトに対するユーザの相対位置情報を取得した後、対応テーブルまたは感覚情報に従って、ターゲットオブジェクトに対応する感覚情報をさらに決定することができる。予測モデル。例えば、対応テーブルは、所定の相対位置情報、対象物の属性情報、及び相互に関連する感覚情報を格納することができる。感覚情報予測モデルは、トレーニング演算を実行することによって決定された所定の感覚情報予測モデルであってもよい。例示的な実施形態によれば、対象物体の相対位置情報と感覚情報を伴う属性サンプルを使用してモデルをトレーニングすることができ、それによって感覚情報を予測するモデルを取得することができる
####対象物の感覚情報には、触覚、聴覚、嗅覚、味覚のうちの少なくとも1つが含まれてもよい。感覚情報は刺激パラメータによって表現できます。刺激パラメータは、実際の環境で対象物に対してユーザーが実際に生成した感覚情報に基づいて決定できます
興味深いことに、サムスンは、関連する刺激装置が、脳コンピューターのスタートアップである Blackrock の完全にプログラム可能な 96 チャンネルの神経刺激装置である CereStim である可能性があると提案しました。しかしもちろん、同社は、問題のデバイスは単なるオプションの1つであり、他のエミュレータも可能であると述べています。
シナリオ例では、ユーザーが摂氏 30 度の物体に触れ、ニューラル ポートの神経信号コレクターを使用して電極活動が記録されます。電極によって記録された神経活動は増幅され、30 kHz のサンプリング周波数でアナログ - デジタル (A/D) サンプリングされ、その後ニューラル ポート神経信号プロセッサ NSP システムを使用して記録されます。次に、CereStim の Matlab API を通じて刺激パラメーターが書き込まれ、さまざまなパルス刺激と電流強度の調整を通じて電極信号が再度取得されました。電極信号が互いに無限に近づくと、摂氏 30 度の物体の刺激パラメーターに達する可能性があります。
同様に、触覚、聴覚、嗅覚などのあらゆる刺激パラメータを取得できます。
203 の操作を実行する際、この方法には感覚情報を電気信号に変換し、ブレイン コンピューター インターフェイス デバイスを通じてユーザーを刺激することが含まれます。
ターゲットオブジェクトに対応する感覚情報を決定した後、実行エンティティはブレインコンピュータインターフェースデバイスを使用して感覚情報を電気信号に変換し、ユーザーの大脳皮質の対応する部分を刺激することによって対応する感覚を生み出すことができます。
他の実施形態によれば、対象物の相対位置情報及び属性情報に基づいて対象物に対応する感覚情報を判断するステップは、ユーザの顔の向き及びユーザの頭部と頭部との間の距離に基づいて判断するステップを含むことができる。対象物と、対象物に対応する嗅覚情報と、対象物に対応する感覚情報として嗅覚情報を判定するステップと、を含む。
#### 別の例示的な実施形態によれば、方法は、対象物体が匂い属性を有すると判断するステップと、ユーザの顔の向きおよびユーザの頭と対象物体との間の距離に従って、対象物体に対応する嗅覚情報を判断するステップとを含むことができる。対象物体が臭気属性を有するとの判定に応答して、またはこれに基づいて、対象物体に対応する感覚情報として嗅覚情報が決定される。匂い属性には、果物の香り、花の香り、食べ物の香り、その他の属性情報が含まれます。
### 一実施形態では、対象物体に関連する感覚情報は、対象物体の相対位置情報および属性情報を利用することによって決定される。対象物体が音響属性を有することを確認することに基づいて、ユーザの顔の向きと、ユーザの頭と対象物体との間の距離に基づいて、対象物体に関連する聴覚情報を決定することができ、聴覚情報が得られる。対象物に関連すると判断された感覚情報
実行エンティティは、ユーザーの頭の左側と右側にあるウェアラブル位置決めデバイスを使用して、ユーザーの左右の座標を決定し、さらにユーザーの頭の左右の座標を結ぶ線を決定できます。直線を基準に、面の方向と対象物の座標とのなす角度によってユーザーの顔の向きが決まります。
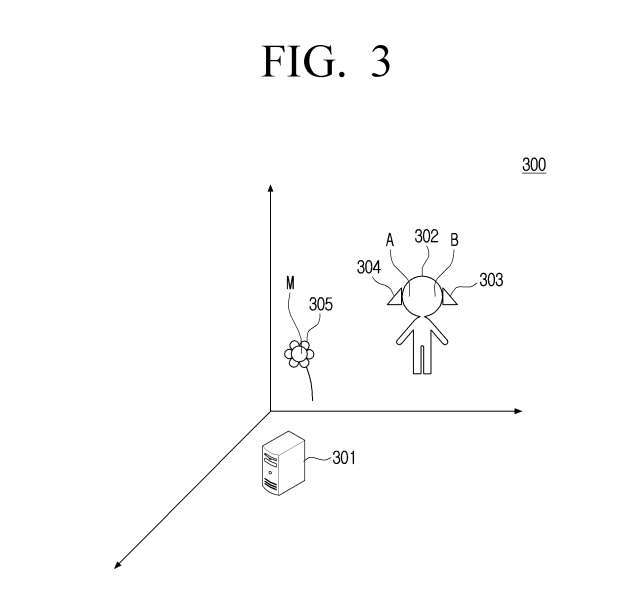 図3に示すように、UWB基地局を原点として使用することにより、実行エンティティ301は空間直交座標系を確立し、ユーザーの頭の左側にある第1のウェアラブル位置決めデバイス303と、第1のウェアラブル位置決めデバイス303を使用することができる。第2のウェアラブル測位デバイス303は、ユーザの頭の右側に配置され、第2のウェアラブル測位デバイス304は、ユーザの頭部に対応する座標AおよびB##を取得する。
###例示的な実施形態によれば、ウェアラブル測位デバイス303および304はUWBチップであってもよい。 UWB基地局は、実行エンティティ301によって実装することができる。座標Aはチップ303、すなわちユーザの頭の左側の座標に対応し、座標Bはチップ304、すなわちユーザの頭の右側の座標に対応する。
図3に示すように、UWB基地局を原点として使用することにより、実行エンティティ301は空間直交座標系を確立し、ユーザーの頭の左側にある第1のウェアラブル位置決めデバイス303と、第1のウェアラブル位置決めデバイス303を使用することができる。第2のウェアラブル測位デバイス303は、ユーザの頭の右側に配置され、第2のウェアラブル測位デバイス304は、ユーザの頭部に対応する座標AおよびB##を取得する。
###例示的な実施形態によれば、ウェアラブル測位デバイス303および304はUWBチップであってもよい。 UWB基地局は、実行エンティティ301によって実装することができる。座標Aはチップ303、すなわちユーザの頭の左側の座標に対応し、座標Bはチップ304、すなわちユーザの頭の右側の座標に対応する。
同時に、対象物体305の座標Mを取得し、直線ABとMが位置する平面の方向とのなす角度をユーザの向きとして求める。ここで、対象オブジェクト305は仮想の花であり、実行主体は、ユーザの顔の向きと、ユーザの頭と対象オブジェクトとの間の距離に応じて、所定の対応テーブルから対象オブジェクトに対応する嗅覚情報を決定し、嗅覚情報は対象物に対応します。対応テーブルには、ユーザーの顔の向き、ユーザーの頭と対象物との距離、および関連する嗅覚情報が記録されます。
#### この実施形態では、ユーザの頭の左側および右側の座標は、ユーザの頭の左側および右側に装着可能な位置決めデバイスを使用することによって決定される。ユーザーの顔の向きは、ユーザーの頭の左右の座標を結んだ直線と、対象物の座標が存在する平面の方向との角度を計算することによって決定される。これにより、ユーザーの顔の向きを決定する精度が効果的に向上します。実行エンティティは、対象物体に対するユーザの頭部の相対位置情報に基づいて、対象物体がユーザの頭の所定の位置に位置し、対象物体が食用の属性を有することを検出し、食用属性を有すると判断することができる。対応する食用属性 対象物に対応する感覚情報としての味覚情報
バナナ味、リンゴ味などの属性情報を含めることができます。
なお、対象物体がユーザの頭部の所定の位置に位置すると判定される前に、ユーザが対象物体に接触する動作が存在する場合もあれば、ユーザの動作が存在しない場合もある。所定の時間範囲内で対象物体に触れること。
### 一実施形態では、ユーザの手と対象オブジェクトとの間の距離が所定の閾値を満たすかどうかを判定することによって、ユーザが仮想オブジェクトに触れる動作があるかどうかを判定することができる。####本実施形態では、まず、ユーザの頭部における対象物の所定の位置とその可食属性に基づいて、可食属性に対応する味覚情報が対象物の感覚情報として決定される。次に、感覚情報は電気信号に変換され、ブレイン コンピューター インターフェイス デバイスを通じて刺激され、ユーザーが仮想環境でオブジェクトの食用特性を体験し、インタラクションの信頼性を高めることができます。
図 4
に示すように、概略図は情報生成方法の適用シナリオを示しています。図 4 に示すアプリケーション シナリオでは、エンティティ 401 は、UWB 基地局を原点とする空間直交座標系を確立できます。ユーザー 402 の 1 つ以上の身体部分にウェアラブル位置決めデバイスを使用することにより、空間直交座標系におけるユーザーの位置情報を取得できます。
たとえば、ウェアラブル位置決めデバイスをユーザーの手や頭に取り付けることができます。 UWB基地局は、実行エンティティ401によって実装することができる。例示的な実施形態によれば、エンティティは、仮想サッカーなどのターゲットオブジェクト403の位置情報を取得し、それによって、ユーザの位置情報およびターゲットの位置情報に基づいて、ターゲットオブジェクトに対するユーザの相対位置を決定することができる。オブジェクトの情報。次に、対応表に基づいて、対象物に対応する感覚情報を決定します。この対応テーブルには、対象物の所定の相対位置情報と属性情報(滑らかさ、柔らかさ等)とそれに対応する感覚情報が記録されている。次に、これらの感覚情報は電気信号に変換され、ブレインコンピュータインターフェースデバイス402
によって刺激されます。 ####情報生成方法は、仮想環境における対象オブジェクトに対するユーザの相対位置情報を取得するステップと、相対位置情報および対象オブジェクトの属性情報に従って対象オブジェクトに対応する感覚情報を決定するステップと、そして、通過するブレイン コンピューター インターフェイス デバイスは、ユーザーを刺激するためにその感覚情報を電気信号に変換します。これにより、ユーザーは仮想環境でオブジェクトの特性を体験し、インタラクションの信頼性が向上します。
情報生成方法のフローチャート500である図5を参照してください。
501 操作では、仮想環境内の対象オブジェクトに対するユーザーの相対位置情報を情報生成メソッド 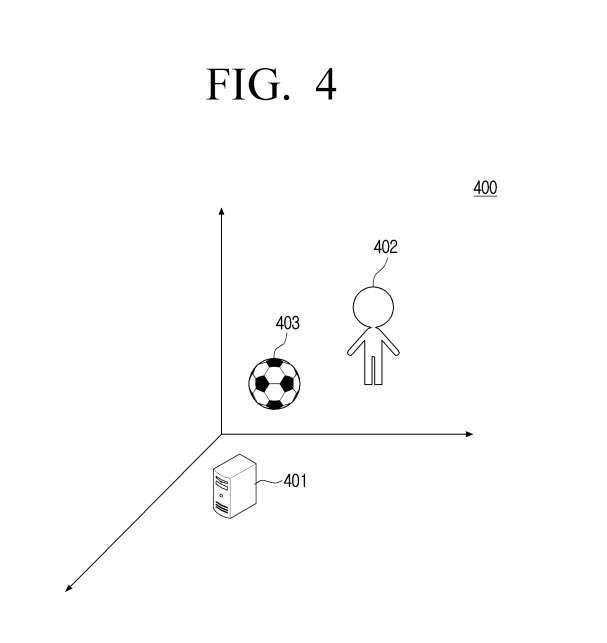 によって取得できます。
によって取得できます。
書き換え内容: 相対位置情報は、ユーザの手と対象物体との間の相対位置情報を含み、実行エンティティは、ユーザの手と対象物体との間の距離を検出してもよい。ユーザの手と対象物との間の距離が所定の閾値を満たし、対象物が輪郭属性を有すると判定されたことに応じて、対象物の輪郭属性に対応する触覚情報が、対象物に対応する感覚情報として決定される#
##プロファイル、材質、質感、滑らかさ、温度、品質、その他の属性情報を含めることができます
その中で、所定のしきい値は、経験、実際のニーズ、および特定のアプリケーション シナリオに基づいて設定できます。例えば、指および/または手のひらと対象物との間の距離が1cm以下、または指および/または手のひらと対象物との間の距離が0.5cm以下であり、これは本開示において限定されない。
具体的には、UWB基地局を原点とした空間直交座標系を構築し、ユーザーの手に装着したデータグローブを利用してユーザーの手の位置情報を取得すると同時に、UWB基地局の位置情報を取得します。ターゲットオブジェクト。対象物は水カップであり、事前に設定されたしきい値は、ユーザーの指および/または手のひらと水カップの間の距離が 1 cm
以下であることです。所定の閾値を満たすために、水カップの輪郭属性、その輪郭属性に対応する触覚情報を考慮しながら、ユーザーの指および/または手のひらと水カップの間の距離が決定されます。水カップは水カップの感覚情報として決定されます
### 動作503において、感覚情報は、ブレインコンピュータインターフェース装置を介して電気信号に変換され、ユーザを刺激する。#### 図2の例示的な実施形態に示される方法と比較すると、図5のフローチャート500に示される方法によれば、ユーザの手と対象物体との間の距離が所定の閾値を満たしているかどうかを判定するために、対象物体は輪郭属性を有しており、対象物の輪郭属性に対応する触覚情報が、対象物体に対応する感覚情報として決定される。
ブレイン・コンピューター・インターフェース・デバイスを通じて、ユーザーが知覚した情報は電気信号に変換され、ユーザーは仮想環境内のオブジェクトの輪郭特性を体験できるように刺激され、インタラクションの信頼性が向上します
詳細資料
:Samsung 特許 | 情報生成方法および装置
「情報生成方法および装置」というタイトルのサムスンの特許出願は、もともと 2023 年 7 月に提出され、最近米国特許商標庁によって公開されました。
通常、米国特許出願は審査後、出願日または優先日から 18 か月以内に自動的に、または出願人の要求に応じて公開されます。特許出願の公開は、特許が付与されたことを意味するものではないことに注意してください。特許出願が公開された後、米国特許商標庁は実体審査を行う必要があり、これには 1 ~ 3 年かかる場合があります。
以上がSamsung XR の特許取得済みの共有ブレイン コンピューター インターフェイスは、匂い、味などの完全な感覚フィードバック刺激を提供します。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
関連記事
続きを見る- 人工知能やブレインコンピューターインターフェースなどの最先端分野に焦点を当てた2023年中関村フォーラムには多くのハイライトがある
- 電極を差し込むと、マスクがあなたの脳を切断します! Neuralink臨床試験がFDAによって承認され、ブレイン・コンピューター・インターフェース・プロジェクトが新たなマイルストーンを達成
- ついに! FDAがマスク氏のブレイン・コンピューター・インターフェースを現実の手術に承認、これは非常に重要
- Brain Tiger Technology: 「ブレイン・コンピューター・インターフェース」の最前線で稼働し、国境を越えた統合で段階的な成果を達成
- マスク氏がビッグニュースを明らかに!そのブレイン・コンピューター・インターフェース会社は、ビジョン・チップを開発中です...