



スケーラブル マップ: オンライン長距離ベクトル化 HD マップ構築のためのスケーラブル マップ学習
次のリンクをクリックして論文をお読みください: https://arxiv.org/pdf/2310.13378.pdf
コードリンク: https://github.com/jingy1yu/ScalableMap
著者のユニットは武漢大学です

論文のアイデア:
この論文では、車載カメラ センサーを使用してオンラインの長距離ベクトル化高精度 (HD) マップを構築するための新しいエンドツーエンド プロセスを提案します。高精度マップのベクトル化表現では、ポリラインとポリゴンを使用してマップ フィーチャを表現します。これらは下流のタスクで広く使用されています。ただし、動的ターゲット検出を参照して設計された以前のソリューションでは、線形マップ要素内の構造的制約が無視されていたため、長距離シーンでのパフォーマンス低下が生じていました。この記事では、マップ フィーチャの属性を使用して、マップ構築のパフォーマンスを向上させます。この論文では、線形構造の指導の下でより正確な鳥瞰図 (BEV) 特徴を抽出し、ベクトル化されたグラフ要素のスケーラビリティをさらに活用するための階層的スパース グラフ表現を提案し、この表現に基づいてプログレッシブ デコード メカニズムを設計します。 。この記事のメソッド ScalableMap は、nuScenes データセット上で、特に長距離シーンで優れたパフォーマンスを示しています。以前の最先端モデルと比較して、6.5 mAP 向上し、18.3 FPS
#Main貢献:
(i) この記事では、初のエンドツーエンドの長距離ベクトル マップ構築パイプラインである ScalableMap を提案します。この論文では、マッピング要素の構造的特徴を利用してより正確な BEV 特徴を抽出し、スケーラブルなベクトル化要素に基づく HSMR を提案し、それに応じてプログレッシブ デコーダと監視戦略を設計します。これらすべてにより、優れた長距離地図認識が実現します。 この研究では、広範な実験評価を通じて、nuScenes データセット [17] での ScalableMap のパフォーマンスをテストしました。この研究手法は、長距離高精度地図学習において最先端の結果を達成し、既存のマルチモーダル手法より 6.5 mAP 向上し、1 秒あたり 18.3 フレームの速度を達成しました。ネットワーク設計 :この記事の目標は、ベクトル化されたマップ要素の構造特性を活用して、長距離にわたってマップ要素を正確に検出するという課題に対処することです。まず、本論文は、2つの分岐を通じて位置認識BEV特徴とインスタンス認識BEV特徴をそれぞれ抽出し、線形構造の指導の下でそれらを融合してハイブリッドBEV特徴を取得する。次に、この論文は、疎であるが正確な方法でマップ要素を抽象化するための階層的疎マップ表現 (HSMR) を提案します。この表現を DETR [16] によって提案されたカスケード復号層と統合して、この論文は、ベクトル化されたマッピング要素のスケーラビリティと推論精度を向上させるプログレッシブ監視戦略を活用することによって、構造化情報の制約を強化するプログレッシブ デコーダを設計します。この記事のソリューションである ScalableMap は、マップのサンプリング密度を動的に高めてさまざまな縮尺で推論結果を取得するため、この記事はより正確なマップ情報をより迅速に取得できるようになります。
次の書き換えられた内容を参照してください。 図 1: ScalableMap の概要。 (a) 構造誘導型ハイブリッド BEV 特徴抽出器。 (b) 階層的スパース マップ表現とプログレッシブ デコーダ。 (c) 漸進的な監視
 元の意味を変えずに内容を書き直すには、元のテキストを中国語に書き直す必要があります
元の意味を変えずに内容を書き直すには、元のテキストを中国語に書き直す必要があります
Yu, J.、Zhang, Z.、Xia、S.、Sang, J. (2023)。 ScalableMap: オンラインの長距離ベクトル化 HD マップ構築のためのスケーラブルなマップ学習。 ArXiv。 /abs/2310.13378
書き換える内容は、元の意味を変えずに書き換えます。書き換え言語は中国語です。元の文は不要です。
以上がScalableMap: オンラインで長距離ベクトル化された高精度地図構築のためのスケーラブルな地図学習の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

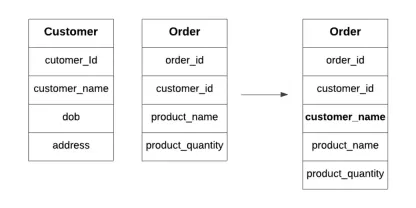 データベースの非正規化とは何ですか?Apr 12, 2025 am 11:10 AM
データベースの非正規化とは何ですか?Apr 12, 2025 am 11:10 AM導入 毎秒数が重要な忙しいカフェを走らせることを想像してみてください。個別の在庫リストと注文リストを常にチェックする代わりに、すべての重要な詳細を1つの読みやすいボードに統合します。これはデノマリザに似ています
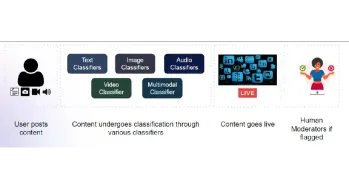 コンテンツモデレートのためのマルチモーダルモデルの構築Apr 12, 2025 am 10:51 AM
コンテンツモデレートのためのマルチモーダルモデルの構築Apr 12, 2025 am 10:51 AM導入 攻撃的な投稿がポップアップ表示されないときに、お気に入りのソーシャルメディアプラットフォームをスクロールしていると想像してください。レポートボタンを押す前に、それはなくなりました。それはコンテンツモデラティです
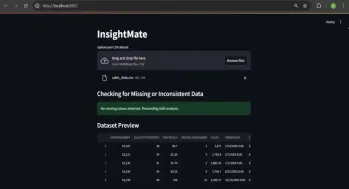 Insightmateでデータの洞察を自動化しますApr 12, 2025 am 10:44 AM
Insightmateでデータの洞察を自動化しますApr 12, 2025 am 10:44 AM導入 今日のデータが多い世界では、巨大なデータセットの処理はかなり圧倒される可能性があります。それが洞察客の出番です。それはあなたのデータを簡単にするように設計されています。データセットをアップロードするだけで、Instanが表示されます
 ベクトルストリーミング:錆を使用したメモリ効率の高いインデックスApr 12, 2025 am 10:42 AM
ベクトルストリーミング:錆を使用したメモリ効率の高いインデックスApr 12, 2025 am 10:42 AM導入 埋め込みのベクトルストリーミングが導入されています。これは、大規模なドキュメントの埋め込みを最適化するように設計されています。 Rustの並行性を使用して非同期チャンクと埋め込みを可能にすると、メモリの使用が減少し、
 レプリットエージェントとは何ですか? |入門ガイド - 分析VidhyaApr 12, 2025 am 10:40 AM
レプリットエージェントとは何ですか? |入門ガイド - 分析VidhyaApr 12, 2025 am 10:40 AM導入 会話と同じように簡単にアプリを開発することを想像してください。セットアップする複雑な開発環境はなく、構成ファイルを調べる必要はありません。コンセプトを貴重なアプリに変換する
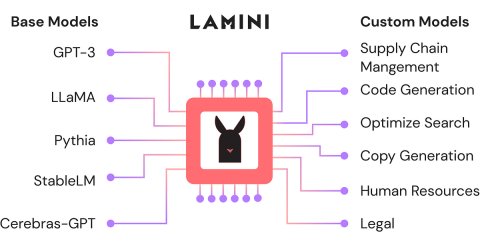 ラミニを使用してオープンソースLLMを微調整します。分析vidhyaApr 12, 2025 am 10:20 AM
ラミニを使用してオープンソースLLMを微調整します。分析vidhyaApr 12, 2025 am 10:20 AM最近、大規模な言語モデルとAIの台頭により、自然言語処理における無数の進歩が見られました。テキスト、コード、画像/ビデオ生成などのドメインのモデルは、人間のような推論とPをアーカイブしています
 PythonのOpenCVとRoboflowによる性別検出-AnalyticsVidhyaApr 12, 2025 am 10:19 AM
PythonのOpenCVとRoboflowによる性別検出-AnalyticsVidhyaApr 12, 2025 am 10:19 AM導入 顔の画像からの性別検出は、コンピュータービジョンの多くの魅力的なアプリケーションの1つです。このプロジェクトでは、OpenCVを対立する場所と性別分類のためにRoboflow APIを組み合わせて、
 広告コンテンツのパーソナライズにおける生成AIの役割は何ですか?Apr 12, 2025 am 10:18 AM
広告コンテンツのパーソナライズにおける生成AIの役割は何ですか?Apr 12, 2025 am 10:18 AM導入 広告の世界は、物々交換システムの概念以来進化の下にありました。広告主は、製品を私たちの注意を引くための創造的な方法を見つけました。現在の年齢では、消費者はBRを期待しています


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター

SecLists
SecLists は、セキュリティ テスターの究極の相棒です。これは、セキュリティ評価中に頻繁に使用されるさまざまな種類のリストを 1 か所にまとめたものです。 SecLists は、セキュリティ テスターが必要とする可能性のあるすべてのリストを便利に提供することで、セキュリティ テストをより効率的かつ生産的にするのに役立ちます。リストの種類には、ユーザー名、パスワード、URL、ファジング ペイロード、機密データ パターン、Web シェルなどが含まれます。テスターはこのリポジトリを新しいテスト マシンにプルするだけで、必要なあらゆる種類のリストにアクセスできるようになります。

DVWA
Damn Vulnerable Web App (DVWA) は、非常に脆弱な PHP/MySQL Web アプリケーションです。その主な目的は、セキュリティ専門家が法的環境でスキルとツールをテストするのに役立ち、Web 開発者が Web アプリケーションを保護するプロセスをより深く理解できるようにし、教師/生徒が教室環境で Web アプリケーションを教え/学習できるようにすることです。安全。 DVWA の目標は、シンプルでわかりやすいインターフェイスを通じて、さまざまな難易度で最も一般的な Web 脆弱性のいくつかを実践することです。このソフトウェアは、

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

EditPlus 中国語クラック版
サイズが小さく、構文の強調表示、コード プロンプト機能はサポートされていません

