
ホームページ >テクノロジー周辺機器 >AI >Nat. Commun.: ロボットがオタマジャクシの進化を模倣し、新しいスキルを獲得します!
Nat. Commun.: ロボットがオタマジャクシの進化を模倣し、新しいスキルを獲得します!

- PHPz転載
- 2023-10-15 11:17:091499ブラウズ
Nat. Commun.: ロボットはオタマジャクシを模倣し、新しいスキルを獲得するために進化します。
オタマジャクシは水の中しか泳げませんが、カエルになると水陸両用の能力を持つようになります。体型の制限により、同じロボットでも多くのスポーツを得意とすることはできません。しかし、ロボットは変身を通じて新しいスキルを獲得できます。
従来の変形ロボットの欠点
ただし、従来の形状変化ロボットは常に大型モーターや伝達機構などの大型の外部機器に依存しており、柔軟性や多用途性が限られていました。これは、筋肉によって駆動され、豊かな感知能力と制御能力を備えた自然界の動物とは明らかに異なります。
最近、イェール大学とコロラド州立大学の研究者らは、従来のロボットの変形方法を完全に変えた革新的な研究を世界的に有名な学術誌「Nature Communications」に発表しました。研究者らは、作動、感知、ロック機能をロボットの内部構造に直接埋め込むことに成功し、煩雑な外部ハードウェアの必要性を排除した。
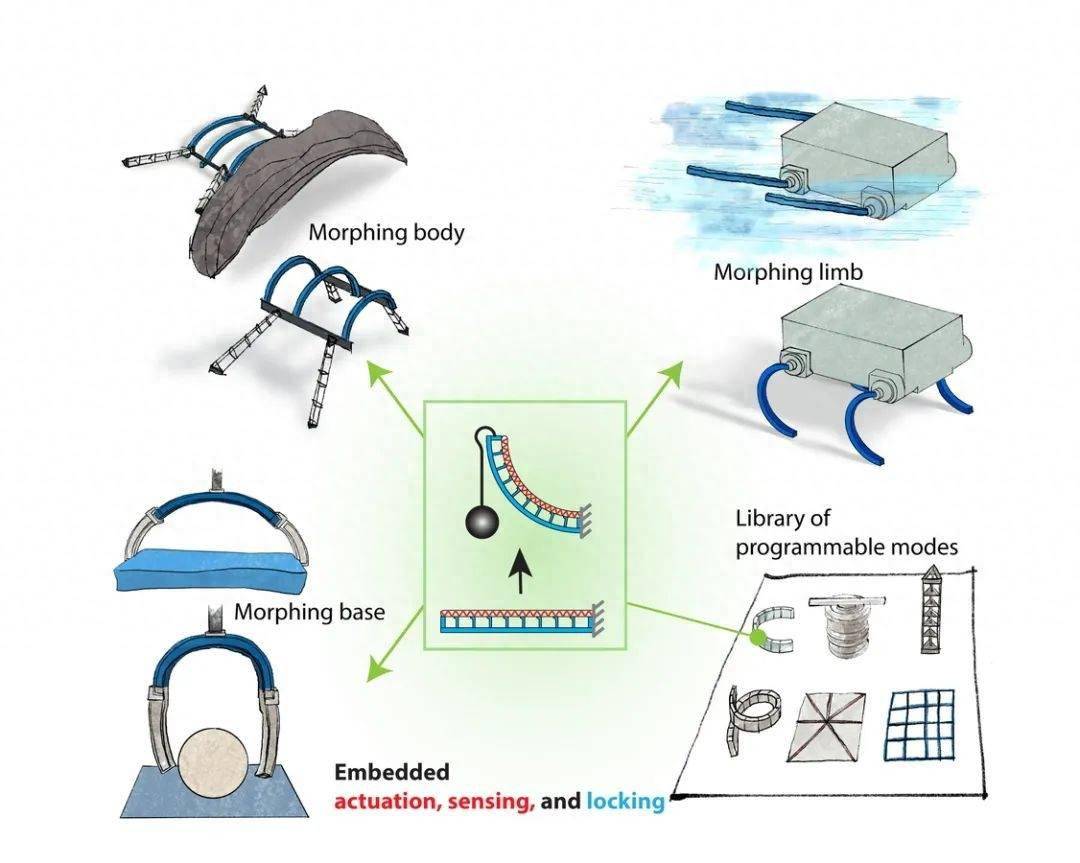
この革新的な技術の中核は、軽量人工筋肉と形状記憶ポリマー (SMP) を組み合わせることです。人工筋肉は電流に反応して収縮することができ、一方、SMP は硬い状態と柔らかい状態を切り替えてロボットの形状をロックすることができます。このアプローチのユニークな点は、複雑な機械構造やトランスミッションを必要とせずに、これらすべての機能がロボットの本体に完全に組み込まれていることです。
人間と同様に、この種のロボットも自身の形状変化を感知し、正確な制御を実現できます。
######応用######
この埋め込み変形技術には幅広い実用化の可能性があり、完全に革新的です。研究チームは、さまざまなロボットシステムにおけるこの技術の多用途性を実証しました。たとえば、オブジェクトのサイズに基づいてスケルトンのサイズを調整するグリッパーをデモンストレーションしました。このようにして、大きなジョーは小さな形状をクランプでき、小さなジョーは大きな形状をクランプできます。
自己感知形状変化グリッパーはさまざまな把握作業に適応でき、四足ロボットは地面の状況に応じて体の形状を調整できます。たとえば、小さな隙間を這って通り抜け、体形を変えて立ち上がってより速く歩くことができます。小さな橋を渡る必要があるときは、橋を持って登ることができます
ロボットは、さまざまな環境やタスクに適応するために、必要に応じて手足の形状を変えることができます。たとえば、ロボットの脚が直線から曲線に変化すると、岸に登って移動できます。
足が曲がった状態からまっすぐな状態に変わったら、水に戻って泳ぐことができます

 この画期的な研究の影響は広範囲に及ぶでしょう。埋め込まれた形態的変化は、周囲の環境と相互作用するロボットの能力を強化するだけでなく、捜索救助、探検、医療、産業オートメーションの用途に新たな可能性をもたらします。ロボットはさまざまな形状と機能をシームレスに切り替えることができ、これによりロボット工学の分野に前例のない多用途性がもたらされます
この画期的な研究の影響は広範囲に及ぶでしょう。埋め込まれた形態的変化は、周囲の環境と相互作用するロボットの能力を強化するだけでなく、捜索救助、探検、医療、産業オートメーションの用途に新たな可能性をもたらします。ロボットはさまざまな形状と機能をシームレスに切り替えることができ、これによりロボット工学の分野に前例のない多用途性がもたらされます
論文を表示するには、下のリンクをクリックしてください:
 書き直す必要がある内容は次のとおりです: https://www.nature.com/articles/s41467-023-41708-6
書き直す必要がある内容は次のとおりです: https://www.nature.com/articles/s41467-023-41708-6
以上がNat. Commun.: ロボットがオタマジャクシの進化を模倣し、新しいスキルを獲得します!の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。