



論文タイトル:「改善されたモデル予測制御に基づく不確実な環境における自律走行車の軌道計画手法」
掲載誌:IEEE Transactions on Intelligent Transportation Systems
発行日:2023年4月
以下は、全文翻訳ではなく、要点と思われる部分を中心とした私自身の論文読書メモです 本記事は、前回の記事に続き、本論文の実験検証部分を整理したものです。前回の記事は以下の通りです。 以下は全文翻訳ではなく、要点と思われる部分を中心とした私自身の論文読書メモであり、本記事は前回に引き続き、本論文の実験検証部分を整理したものである。前回の記事は次のとおりです。
fhwim: 不確実な環境における自律走行車のための改良されたモデル予測制御に基づく軌道計画手法
https://zhuanlan.zhihu.com/p/ 658708080
1. シミュレーションの検証
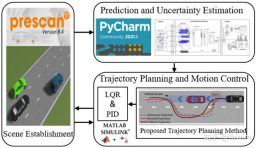
(1) シミュレーション環境
協調シミュレーションツールには、Prescan、PyCharm、Matlab/Simulink があり、その中でも Prescan を使用してビルドします。シミュレートされた交通シーンでは、PyCharm (ニューラル ネットワークまたは簡単に pytorch を使用) を使用して融合予測モジュールを作成し、Matlab/Simulink (MPC ツールボックスを使用) を使用して軌道計画モジュールを構築し、車両制御を実現します。アイデアはまだ比較的シンプルで、自然で合理的です。この部分の制御に使用される水平制御は LQR、垂直制御は PID を使用します。これも比較的一般的な制御方式です。融合予測モジュールの LSTM エンコーダ/デコーダはオープン ソース コードを使用しており、著者は参考文献 [31] Comprehensive Review of Neural Network-Based Prediction Intervals and New Advances から引用したと述べていますが、この記事は 2011 年に公開されたものだと見ました。これは少し古いので (2011 年の LSTM エンコーダ/デコードはどこにありましたか?)、作者がこれに基づいてコードを変更したかどうかはわかりません。


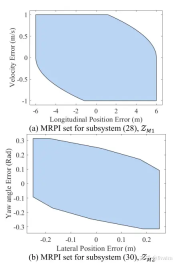 #図 2 サブシステムの MRPI セット
#図 2 サブシステムの MRPI セット
(3) ケース 1: 静的障害物回避シナリオ
静的障害物回避シナリオは、障害物車両が静止していることを指します。軌道計画の結果は次のとおりです:
 一般的な MPC 手法とパイプライン ベースの手法を比較します (図 3)。 MPC法
一般的な MPC 手法とパイプライン ベースの手法を比較します (図 3)。 MPC法
ここで彼の伝説に何か間違っているのではないかと思うのですが、前回の記事によると、最終的な基準軌道は目標軌道と調整軌道を加算することで得られるとのことですが、同時にチューブとも言っていました。 MPC では図 3(b) の
と の部分で誤差が大きくなりますが、調整軌道により誤差が小さくなるので、目標軌道、基準軌道となるはずです。図 3(b) では、凡例を交換するのが彼の記事の論理に沿ったものになるでしょう、つまり、緑色の線が最終的な基準軌道であり、青色の線が中間の目標軌道です。以下に速度曲線と水平・垂直誤差曲線を含めますが、おそらく著者の言いたいことは理解できると思います. 緑の曲線はチューブベースの MPC の最終結果であり、青の曲線は調整軌道なしの結果です。
#図 4 は、一般的な MPC 方式とパイプラインベースの MPC 方式の速度変化の比較を示しています。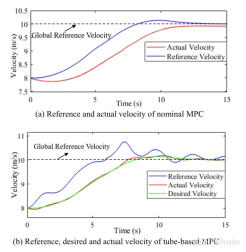
図 5 水平方向の位置の比較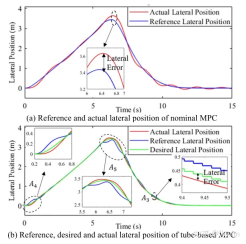
水平方向と垂直方向の誤差の比較
詳しくは割愛しますが、ハンドル角変化の滑らかさについても筆者が比較してみましたが、一言で言えば良くなりました。同時に,著者は,軌道調整の良好な効果の理論的根拠を提案した.それを追加した後,軌道誤差は常にMRPIセット内に収まる.つまり,チューブベースモデル予測制御の追従偏差(チューブベースの MPC) は常に MRPI セット内にあります。一般モデル予測制御 (MPC) には、非常に大きくなる可能性がある不確実な環境では境界がありません。
(4) ケース 2: 動的障害物回避シナリオ
前のシナリオと比較して、障害物車が動き始めました。全体的な軌道、速度の変化、水平方向と垂直方向の誤差、ハンドル変更の滑らかさについては詳しく説明しません。ここでは、全体的な軌跡の図のみを示します。
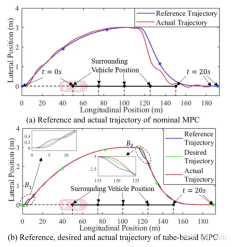
図 7 一般的な MPC メソッドとチューブベースの MPC メソッド間の全体的な軌跡の比較
(5) case3: 実際の運転シナリオ
ここで、著者は自分の方法を検証するために NGSIM データセットを使用することを選択します。まず、著者らは融合予測手法を検証した。 NGSIM データセットには車両軌道データが含まれており、著者はこれを過去の軌道と将来の軌道に分割し、LSTM エンコーダ/デコーダが学習するためのトレーニング セットを構築しました。著者は 10,000 の軌跡を選択し、そのうち 7,500 がトレーニング セットとして使用され、2,500 が検証セットとして使用されました。オプティマイザーは Adam を取得し、学習率を 0.01 に設定します。予測効果を以下の図に示します。
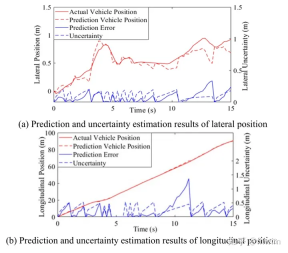
図 8 水平および垂直軌道の予測と不確実性の結果
著者はこの記事で軌道を使用しませんでした。 ADE、FDEなどの予測分野で使用される指標。このアプローチには説得力がないと思いますが、この記事の焦点はチューブベースの MPC に基づく軌道計画であることも理解できます。
軌道予測を検証した後、軌道計画を実行して、MPC の役割をさらに検証しました。軌道予測モジュール 、ここでは 3 つの状況を比較します:
(a) 障害車両の真の将来軌道がすでにわかっている場合、軌道計画を実行します。これはコントロール グループとして機能します。
そうでない場合 障害車両の将来の軌道がわかっている場合は、まず軌道予測を行い(不確かさの計算はしない)、次に軌道計画を行います。
(c) そうでない場合障害車両の将来の軌道を知っている場合、最初に軌道予測を実行し(不確実性を計算)、次に軌道計画を実行します。
図 9 は、対応する (a)、(b)、および (c) の結果を示しています。真の位置への予測結果と提案手法
提案手法はこの記事の手法の結果であり、提案手法の方が真の位置に近いことがわかり、この融合予測手法(特に不確かさの計算)が有効です。
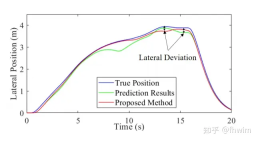
図 9 軌道予測モジュールを検証する 3 つの方法の比較
ここでは、case1 と case2 が軌道計画部分 (一般モデル) を検証していることがわかります。予測制御 (MPC の前の軌道予測部分) とパイプライン ベースの MPC は同じです。この比較により、パイプライン ベースの MPC の役割を説明できます。 Case3は軌道予測モジュールの検証ですが、2種類の検証が行われていることがわかります。 1 つ目のタイプは、予測軌道と実際の軌道を直接比較するもので、2 つ目は、まず将来の軌道を知る/将来の軌道を予測する(不確実性を計算せず)/将来の軌道を予測する(不確実性を計算する)後に軌道計算を行うものです。計画中。実位置を基準として、不確かさ計算ありの軌道予測方法と不確かさ計算なしの軌道予測方法の効果を比較する。これら 2 つのモジュールの検証アイデアは依然として非常に明確です
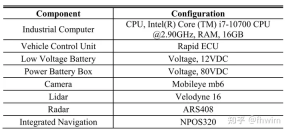
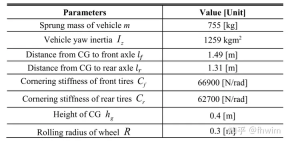
2. 実車実験検証
実験に使用された車両は次の図に示すとおりです。
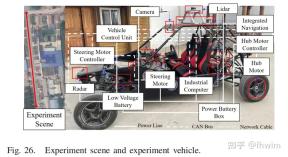
為了安全著想,作者設定的實驗場景和模擬實驗case1一樣,都是一個靜態避障場景,還是比較整體軌跡、速度變化、橫縱向誤差、方向盤變化平穩性這些東西,不再贅述。
3. 閱讀總結
首先,論文的想法是關於具有不確定性計算的軌跡預測模組和基於tube-based MPC的軌跡規劃模組。其中,軌跡規劃模組是主要內容。我對這個模組化的形式感到很滿意,因為它將軌跡預測真正應用到了軌跡規劃上。預測的輸出作為規劃的輸入,而規劃模組僅確定一個安全閾值給預測模組,兩個模組的耦合性較弱。換句話說,預測模組可以用其他方法替代,只要能提供預測障礙車軌跡和不確定性的結果即可。未來,可以考慮使用更高級的神經網路來直接預測軌跡和不確定性。整體而言,這個融合預測演算法的流程有些複雜,但我認為論文的想法很好。模擬和實車試驗的想法和工作量也令人滿意
其次是文章閱讀時發現的一些低階的錯誤。例如在LSTM encoder-decoder那一部分,LSTM輸出的是未來 步的軌跡點,公式裡寫的也是,但是文字裡這寫成了 #。

圖13 LSTM encoder-decoder部分的一些錯誤
然後是在模擬實驗部分,計算MRPI Set時說system(21)也就是error system分成了子系統(32)和(34),但實際上是子系統(30)和(32),這些小錯誤不影響整體方法但是也會影響讀者的閱讀體驗。

圖14 模擬實驗部分MRPI Set原文
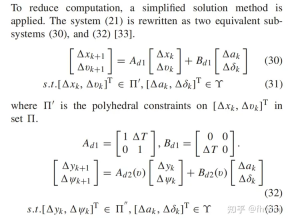
#圖15中的錯誤系統被分成子系統( 30)和(32)

原文連結:https://mp.weixin.qq.com/s/0DymvaPmiCc_tf3pUArRiA
以上が不確実な環境における自動運転のための軌道計画方法の改善の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Microsoft Work Trend Index 2025は、職場の容量の緊張を示していますApr 24, 2025 am 11:19 AM
Microsoft Work Trend Index 2025は、職場の容量の緊張を示していますApr 24, 2025 am 11:19 AMAIの急速な統合により悪化した職場での急成長能力の危機は、増分調整を超えて戦略的な変化を要求します。 これは、WTIの調査結果によって強調されています。従業員の68%がワークロードに苦労しており、BURにつながります
 AIは理解できますか?中国の部屋の議論はノーと言っていますが、それは正しいですか?Apr 24, 2025 am 11:18 AM
AIは理解できますか?中国の部屋の議論はノーと言っていますが、それは正しいですか?Apr 24, 2025 am 11:18 AMジョン・サールの中国の部屋の議論:AIの理解への挑戦 Searleの思考実験は、人工知能が真に言語を理解できるのか、それとも真の意識を持っているのかを直接疑問に思っています。 チャインを無知な人を想像してください
 中国の「スマート」AIアシスタントは、マイクロソフトのリコールのプライバシーの欠陥をエコーしますApr 24, 2025 am 11:17 AM
中国の「スマート」AIアシスタントは、マイクロソフトのリコールのプライバシーの欠陥をエコーしますApr 24, 2025 am 11:17 AM中国のハイテク大手は、西部のカウンターパートと比較して、AI開発の別のコースを図っています。 技術的なベンチマークとAPI統合のみに焦点を当てるのではなく、「スクリーン認識」AIアシスタントを優先しています。
 Dockerは、おなじみのコンテナワークフローをAIモデルとMCPツールにもたらしますApr 24, 2025 am 11:16 AM
Dockerは、おなじみのコンテナワークフローをAIモデルとMCPツールにもたらしますApr 24, 2025 am 11:16 AMMCP:AIシステムに外部ツールにアクセスできるようになります モデルコンテキストプロトコル(MCP)により、AIアプリケーションは標準化されたインターフェイスを介して外部ツールとデータソースと対話できます。人類によって開発され、主要なAIプロバイダーによってサポートされているMCPは、言語モデルとエージェントが利用可能なツールを発見し、適切なパラメーターでそれらを呼び出すことができます。ただし、環境紛争、セキュリティの脆弱性、一貫性のないクロスプラットフォーム動作など、MCPサーバーの実装にはいくつかの課題があります。 Forbesの記事「人類のモデルコンテキストプロトコルは、AIエージェントの開発における大きなステップです」著者:Janakiram MSVDockerは、コンテナ化を通じてこれらの問題を解決します。 Docker Hubインフラストラクチャに基づいて構築されたドキュメント
 6億ドルのスタートアップを構築するために6つのAIストリートスマート戦略を使用するApr 24, 2025 am 11:15 AM
6億ドルのスタートアップを構築するために6つのAIストリートスマート戦略を使用するApr 24, 2025 am 11:15 AM最先端のテクノロジーと巧妙なビジネスの洞察力を活用して、コントロールを維持しながら非常に収益性の高いスケーラブルな企業を作成する先見の明のある起業家によって採用された6つの戦略。このガイドは、建設を目指している起業家向けのためのものです
 Googleフォトの更新は、すべての写真の見事なウルトラHDRのロックを解除しますApr 24, 2025 am 11:14 AM
Googleフォトの更新は、すべての写真の見事なウルトラHDRのロックを解除しますApr 24, 2025 am 11:14 AMGoogle Photosの新しいウルトラHDRツール:画像強化のゲームチェンジャー Google Photosは、強力なウルトラHDR変換ツールを導入し、標準的な写真を活気のある高ダイナミックレンジ画像に変換しました。この強化は写真家に利益をもたらします
 Descopeは、AIエージェント統合の認証フレームワークを構築しますApr 24, 2025 am 11:13 AM
Descopeは、AIエージェント統合の認証フレームワークを構築しますApr 24, 2025 am 11:13 AM技術アーキテクチャは、新たな認証の課題を解決します エージェントアイデンティティハブは、AIエージェントの実装を開始した後にのみ多くの組織が発見した問題に取り組んでいます。
 Google Cloud Next2025と現代の仕事の接続された未来Apr 24, 2025 am 11:12 AM
Google Cloud Next2025と現代の仕事の接続された未来Apr 24, 2025 am 11:12 AM(注:Googleは私の会社であるMoor Insights&Strategyのアドバイザリークライアントです。) AI:実験からエンタープライズ財団まで Google Cloud Next 2025は、実験機能からエンタープライズテクノロジーのコアコンポーネント、ストリームへのAIの進化を紹介しました


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

MantisBT
Mantis は、製品の欠陥追跡を支援するために設計された、導入が簡単な Web ベースの欠陥追跡ツールです。 PHP、MySQL、Web サーバーが必要です。デモおよびホスティング サービスをチェックしてください。

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

ZendStudio 13.5.1 Mac
強力な PHP 統合開発環境

SublimeText3 中国語版
中国語版、とても使いやすい

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター
ホットトピック
 7685
7685 15163914139352128725122929
15163914139352128725122929