
ホームページ >テクノロジー周辺機器 >AI >『Nature Communications』に掲載されたこのロボットは、トランスフォーマーが現実になる可能性を生み出します
『Nature Communications』に掲載されたこのロボットは、トランスフォーマーが現実になる可能性を生み出します

- 王林転載
- 2023-07-15 15:05:201571ブラウズ
ピーク時の「人々が群れに従う」移動モードを解決し、交通渋滞の問題を完全に解決できる新しい交通モードはあるのでしょうか?
「渋滞」や「混雑」に遭遇したときに、この問題について考えたことがある人は多いと思います。車をトランスフォーマーにして乗り物を超越するというのは、ほとんどの人のアイデアかもしれません。

最近、「Nature Communications」は、未来の移動手段についての人々の空想と非常によく一致する M4 (マルチモーダル移動変形ロボット Morphobot) を公開しました。

M4 は、非構造化マルチマトリックス環境で広範囲の動作可塑性を持つロボットを製造することを目的として、カリフォルニア工科大学と米国のノースイースタン大学によって共同開発されたと報告されています。このロボットは並外れた機動性を有しており、将来的にはマルチモーダルな複合的な国境を越えた移動が可能となる可能性がある。
人間ロボットのデザインの多くは、動物のバイオニクスからインスピレーションを受けています。自然界では、ウミガメやアシカなどの水生動物は前ヒレを使って泳ぎ、前ヒレで重い体重を支えて四足歩行のように地面を歩くことができ、ミーアキャットは四肢を使って走ったり歩いたり、また、後ろ足で立って周囲を偵察することもでき、若いジャコウキジは翼を使って飛ぶことができ、避難のために垂直または急な斜面を登るのにも翼を使うことができます。
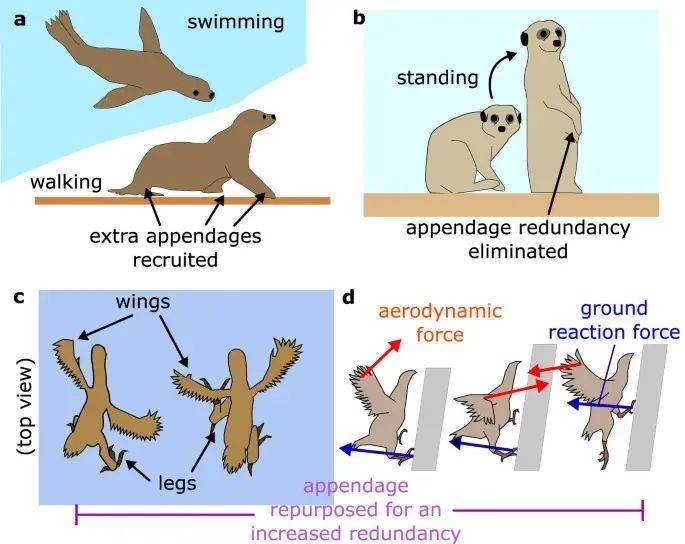
アシカの足ひれは歩行を補助します b ミーアキャットの後肢は偵察を補助します c キジの雛は翼を使って四足歩行を補助します d チュカル鳥の翼は傾斜歩行を補助します
カリフォルニア工科大学とノースイースタン大学の共同チームも、かなりの運動可塑性を持つこれらの動物に触発され、形態学的および機能的構造を利用して付属器官を再利用するこれらの動物を参照して、 「必要に応じて使用する。冗長性を作成 (または削除) し、モバイルの利点を得る」という考え方です。
同時に、研究開発チームはこのアイデアを M4 ロボットにも実装し、M4 ロボットの 4 本の脚が変形を通じて冗長動作を実行できるようにして、動作の可塑性を最大化しました。
再調整により、M4 の 4 本の脚はいくつかの異なる形状にすることができます:
l四足歩行のための 4 本の脚
l飛行用の 4 つのスラスター
l45 度の斜面での WAIR 用の 2 つのプロペラと 2 つの車輪
l大きな障害物を乗り越えるための 2 つのプロペラと 2 つの車輪
lオートバイ制御のための 2 つの車輪と 2 つの手
lMIP の二輪車
lUGV 4輪
lしゃがむための4つの車輪
シャーシ底部のアタッチメントは、車輪、脚、プロペラに再調整可能であり、このモジュラー設計の実現は、M4 のパフォーマンスを向上させるための重要な条件を提供します。
M4 が 2 つの車輪で立つ必要がある場合、4 つの車輪のうち 2 つが折りたたまれ、内蔵のプロペラが上向きに回転してロボットのバランスをとります。
M4 が飛行する必要があるときは、4 つの車輪すべてが折りたたまれ、プロペラがロボットを地面から持ち上げます。
M4 ロボットは、チルトホイール内の 4 つのローターを介して飛行します
ホイール アセンブリのジョイント設計により、M4 は歩行動作も実行できます。
ただ、現在の M4 では、歩行アクションは主に概念実証です。将来的には、M4世代は、歩行ロボットでは達成が困難な、歩行が困難な複雑な地形を効果的に横断する能力を備えることが期待されています。
M4 ロボットは走行モードから歩行モードに変わります
M4 の移動姿勢には、飛行、回転、匍匐、しゃがみ、バランス、回転、偵察、局所操作の 8 つの異なるタイプが含まれていることがわかり、付属物によって再利用される冗長操作の助けを借りて、さまざまな移動モードを実行できます。モーフィング胴体と切り替え可能なシュラウド付きプロペラを備えた付属品を再利用することにより、M4 は、無人地上車両 (UGV)、移動式倒立振子 (MIP)、無人航空機システム (UAS)、スラスター支援 MIP、脚移動およびバイク操縦MIPモード。
M4 研究開発チームは、優れた機動性に加えて、ロボットに「魂」を与える人工知能も追加しました。ロボットの動きの柔軟性と人工知能を組み合わせることで、M4 は前方の地形に基づいて最も効果的なものを独自に選択できるようになります。 . 動きの形式。
たとえば、不慣れな環境では、M4 は最初に最も省エネな 4 輪ローリング モードで起動します。岩などの障害物に遭遇すると、M4 はスタンディング モードに切り替わり、内蔵センサーを使用して航空調査と偵察のためにエリアの多目的スキャンを実行し、それによって重要な戦略的状況認識を提供します。
車輪付きロボットが横断できない峡谷やその他の地物に遭遇した場合、M4 は車輪をローターに再構成し、峡谷を越えて反対側まで飛行し、その後転がり続けます。
カリフォルニア工科大学とノースイースタン大学が共同開発したマルチモーダル移動変形ロボット M4 についての見解を尋ねられたとき、カリフォルニア工科大学自律システム技術センター (CAST) 所長のハンス・W・リップマン氏はこう答えた。工学部のモリー・ガリブ教授(博士号 '83)は、「M4 の現在の超越的な性能は、その応用分野の拡大にさらなる可能性をもたらします。M4 は緊急救助に加えて、捜索、宇宙探査、 」
以上が『Nature Communications』に掲載されたこのロボットは、トランスフォーマーが現実になる可能性を生み出しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。