



#1. 単眼 3 次元再構成の概要
対象世界の物体は 3 次元ですが、得られる画像は 2 次元ですが、この二次元画像から対象物の三次元情報をセンシングします。三次元再構成技術は、画像を何らかの方法で処理してコンピュータが認識できる三次元情報を取得し、対象物を解析する技術です。単眼 3D 再構成は、単一のカメラの動きに基づいて両眼視をシミュレートし、空間内のオブジェクトの 3 次元視覚情報を取得します。ここで、単眼とは単一のカメラを指します。
2. 実装プロセス
オブジェクトの単眼 3 次元再構築プロセスでは、関連する動作環境は次のとおりです:
matplotlib 3.3.4
numpy 1.19.5
opencv-contrib-python 3.4.2.16
opencv-python 3.4.2.16
pillow 8.2.0
python 3.6.2
再構成には主に以下の手順が含まれます。
#(1) カメラキャリブレーション#(2) 画像特徴抽出とマッチング
#(3) 3 次元再構成 次に、各ステップの具体的な実装を詳しく見てみましょう: (1) カメラのキャリブレーション 携帯電話のカメラなど、私たちの日常生活には多くのカメラがあります。デジタルカメラと機能モジュールの種類 カメラなど 各カメラのパラメータ、つまり、カメラで撮影される写真の解像度やモードなどが異なります。オブジェクトの 3 次元再構成を実行するときに、カメラの行列パラメータが事前にわからないと仮定すると、カメラの行列パラメータを計算する必要があります。この手順はカメラ キャリブレーションと呼ばれます。カメラのキャリブレーションに関する原理については、インターネット上の多くの方が詳しく説明しているので、ここでは紹介しません。キャリブレーションの具体的な実装は次のとおりです。def camera_calibration(ImagePath):
# 循环中断
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 棋盘格尺寸(棋盘格的交叉点的个数)
row = 11
column = 8
objpoint = np.zeros((row * column, 3), np.float32)
objpoint[:, :2] = np.mgrid[0:row, 0:column].T.reshape(-1, 2)
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
batch_images = glob.glob(ImagePath + '/*.jpg')
for i, fname in enumerate(batch_images):
img = cv2.imread(batch_images[i])
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# find chess board corners
ret, corners = cv2.findChessboardCorners(imgGray, (row, column), None)
# if found, add object points, image points (after refining them)
if ret:
objpoints.append(objpoint)
corners2 = cv2.cornerSubPix(imgGray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners2)
# Draw and display the corners
img = cv2.drawChessboardCorners(img, (row, column), corners2, ret)
cv2.imwrite('Checkerboard_Image/Temp_JPG/Temp_' + str(i) + '.jpg', img)
print("成功提取:", len(batch_images), "张图片角点!")
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, imgGray.shape[::-1], None, None)
このうち、cv2.calibrateCamera 関数で取得した mtx 行列が K 行列です。 対応するパラメータを変更し、キャリブレーションを完了した後、チェッカーボードのコーナー ポイントの画像を出力して、チェッカーボードのコーナー ポイントが正常に抽出されたかどうかを確認できます。出力されるコーナー ポイントの画像は次のとおりです:
図 1: チェッカーボードの角点の抽出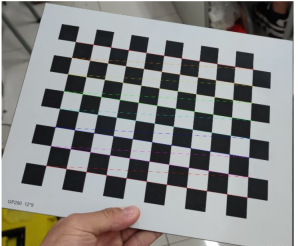
画像特徴点抽出アルゴリズムには、SIFT アルゴリズム、SURF アルゴリズム、ORB アルゴリズムという 3 つのアルゴリズムがよく使われます。このステップでは、包括的な分析と比較を通じて、SURF アルゴリズムを使用して画像の特徴点を抽出します。 3 つのアルゴリズムの特徴点抽出効果を比較したい場合は、オンラインで検索して参照してください。ここでは 1 つずつの比較は行いません。具体的な実装は次のとおりです。
def epipolar_geometric(Images_Path, K):
IMG = glob.glob(Images_Path)
img1, img2 = cv2.imread(IMG[0]), cv2.imread(IMG[1])
img1_gray = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
img2_gray = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
# Initiate SURF detector
SURF = cv2.xfeatures2d_SURF.create()
# compute keypoint & descriptions
keypoint1, descriptor1 = SURF.detectAndCompute(img1_gray, None)
keypoint2, descriptor2 = SURF.detectAndCompute(img2_gray, None)
print("角点数量:", len(keypoint1), len(keypoint2))
# Find point matches
bf = cv2.BFMatcher(cv2.NORM_L2, crossCheck=True)
matches = bf.match(descriptor1, descriptor2)
print("匹配点数量:", len(matches))
src_pts = np.asarray([keypoint1[m.queryIdx].pt for m in matches])
dst_pts = np.asarray([keypoint2[m.trainIdx].pt for m in matches])
# plot
knn_image = cv2.drawMatches(img1_gray, keypoint1, img2_gray, keypoint2, matches[:-1], None, flags=2)
image_ = Image.fromarray(np.uint8(knn_image))
image_.save("MatchesImage.jpg")
# Constrain matches to fit homography
retval, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 100.0)
# We select only inlier points
points1 = src_pts[mask.ravel() == 1]
points2 = dst_pts[mask.ravel() == 1]見つかった特徴点は次のとおりです。
図 2: 特徴点の抽出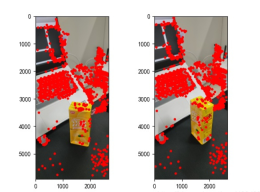
図 3: 3 次元再構成
#3. 結論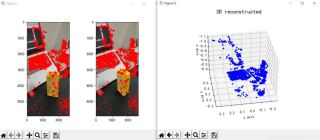
points1 = cart2hom(points1.T)
points2 = cart2hom(points2.T)
# plot
fig, ax = plt.subplots(1, 2)
ax[0].autoscale_view('tight')
ax[0].imshow(cv2.cvtColor(img1, cv2.COLOR_BGR2RGB))
ax[0].plot(points1[0], points1[1], 'r.')
ax[1].autoscale_view('tight')
ax[1].imshow(cv2.cvtColor(img2, cv2.COLOR_BGR2RGB))
ax[1].plot(points2[0], points2[1], 'r.')
plt.savefig('MatchesPoints.jpg')
fig.show()
#
points1n = np.dot(np.linalg.inv(K), points1)
points2n = np.dot(np.linalg.inv(K), points2)
E = compute_essential_normalized(points1n, points2n)
print('Computed essential matrix:', (-E / E[0][1]))
P1 = np.array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0]])
P2s = compute_P_from_essential(E)
ind = -1
for i, P2 in enumerate(P2s):
# Find the correct camera parameters
d1 = reconstruct_one_point(points1n[:, 0], points2n[:, 0], P1, P2)
# Convert P2 from camera view to world view
P2_homogenous = np.linalg.inv(np.vstack([P2, [0, 0, 0, 1]]))
d2 = np.dot(P2_homogenous[:3, :4], d1)
if d1[2] > 0 and d2[2] > 0:
ind = i
P2 = np.linalg.inv(np.vstack([P2s[ind], [0, 0, 0, 1]]))[:3, :4]
Points3D = linear_triangulation(points1n, points2n, P1, P2)
fig = plt.figure()
fig.suptitle('3D reconstructed', fontsize=16)
ax = fig.gca(projection='3d')
ax.plot(Points3D[0], Points3D[1], Points3D[2], 'b.')
ax.set_xlabel('x axis')
ax.set_ylabel('y axis')
ax.set_zlabel('z axis')
ax.view_init(elev=135, azim=90)
plt.savefig('Reconstruction.jpg')
plt.show()以上がPythonをベースに単眼3D再構成を実現する方法の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Pythonの主な目的:柔軟性と使いやすさApr 17, 2025 am 12:14 AM
Pythonの主な目的:柔軟性と使いやすさApr 17, 2025 am 12:14 AMPythonの柔軟性は、マルチパラダイムサポートと動的タイプシステムに反映されていますが、使いやすさはシンプルな構文とリッチ標準ライブラリに由来しています。 1。柔軟性:オブジェクト指向、機能的および手続き的プログラミングをサポートし、動的タイプシステムは開発効率を向上させます。 2。使いやすさ:文法は自然言語に近く、標準的なライブラリは幅広い機能をカバーし、開発プロセスを簡素化します。
 Python:汎用性の高いプログラミングの力Apr 17, 2025 am 12:09 AM
Python:汎用性の高いプログラミングの力Apr 17, 2025 am 12:09 AMPythonは、初心者から上級開発者までのすべてのニーズに適した、そのシンプルさとパワーに非常に好まれています。その汎用性は、次のことに反映されています。1)学習と使用が簡単、シンプルな構文。 2)Numpy、Pandasなどの豊富なライブラリとフレームワーク。 3)さまざまなオペレーティングシステムで実行できるクロスプラットフォームサポート。 4)作業効率を向上させるためのスクリプトおよび自動化タスクに適しています。
 1日2時間でPythonを学ぶ:実用的なガイドApr 17, 2025 am 12:05 AM
1日2時間でPythonを学ぶ:実用的なガイドApr 17, 2025 am 12:05 AMはい、1日2時間でPythonを学びます。 1.合理的な学習計画を作成します。2。適切な学習リソースを選択します。3。実践を通じて学んだ知識を統合します。これらの手順は、短時間でPythonをマスターするのに役立ちます。
 Python vs. C:開発者の長所と短所Apr 17, 2025 am 12:04 AM
Python vs. C:開発者の長所と短所Apr 17, 2025 am 12:04 AMPythonは迅速な開発とデータ処理に適していますが、Cは高性能および基礎となる制御に適しています。 1)Pythonは、簡潔な構文を備えた使いやすく、データサイエンスやWeb開発に適しています。 2)Cは高性能で正確な制御を持ち、ゲームやシステムのプログラミングでよく使用されます。
 Python:時間のコミットメントと学習ペースApr 17, 2025 am 12:03 AM
Python:時間のコミットメントと学習ペースApr 17, 2025 am 12:03 AMPythonを学ぶのに必要な時間は、人によって異なり、主に以前のプログラミングの経験、学習の動機付け、学習リソースと方法、学習リズムの影響を受けます。現実的な学習目標を設定し、実用的なプロジェクトを通じて最善を尽くします。
 Python:自動化、スクリプト、およびタスク管理Apr 16, 2025 am 12:14 AM
Python:自動化、スクリプト、およびタスク管理Apr 16, 2025 am 12:14 AMPythonは、自動化、スクリプト、およびタスク管理に優れています。 1)自動化:OSやShutilなどの標準ライブラリを介してファイルバックアップが実現されます。 2)スクリプトの書き込み:Psutilライブラリを使用してシステムリソースを監視します。 3)タスク管理:スケジュールライブラリを使用してタスクをスケジュールします。 Pythonの使いやすさと豊富なライブラリサポートにより、これらの分野で優先ツールになります。
 Pythonと時間:勉強時間を最大限に活用するApr 14, 2025 am 12:02 AM
Pythonと時間:勉強時間を最大限に活用するApr 14, 2025 am 12:02 AM限られた時間でPythonの学習効率を最大化するには、PythonのDateTime、時間、およびスケジュールモジュールを使用できます。 1. DateTimeモジュールは、学習時間を記録および計画するために使用されます。 2。時間モジュールは、勉強と休息の時間を設定するのに役立ちます。 3.スケジュールモジュールは、毎週の学習タスクを自動的に配置します。
 Python:ゲーム、GUIなどApr 13, 2025 am 12:14 AM
Python:ゲーム、GUIなどApr 13, 2025 am 12:14 AMPythonはゲームとGUI開発に優れています。 1)ゲーム開発は、2Dゲームの作成に適した図面、オーディオ、その他の機能を提供し、Pygameを使用します。 2)GUI開発は、TKINTERまたはPYQTを選択できます。 TKINTERはシンプルで使いやすく、PYQTは豊富な機能を備えており、専門能力開発に適しています。


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

ゼンドスタジオ 13.0.1
強力な PHP 統合開発環境

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

AtomエディタMac版ダウンロード
最も人気のあるオープンソースエディター

SublimeText3 Mac版
神レベルのコード編集ソフト(SublimeText3)

VSCode Windows 64 ビットのダウンロード
Microsoft によって発売された無料で強力な IDE エディター

