

 テクノロジー周辺機器AIトレーニング速度が 17% 向上 4 番目のパラダイムのオープンソース強化学習研究フレームワークは、シングルおよびマルチエージェントのトレーニングをサポートします。
テクノロジー周辺機器AIトレーニング速度が 17% 向上 4 番目のパラダイムのオープンソース強化学習研究フレームワークは、シングルおよびマルチエージェントのトレーニングをサポートします。トレーニング速度が 17% 向上 4 番目のパラダイムのオープンソース強化学習研究フレームワークは、シングルおよびマルチエージェントのトレーニングをサポートします。

OpenRL は、Fourth Paradigm 強化学習チームによって開発された PyTorch ベースの強化学習研究フレームワークで、シングル エージェント、マルチ エージェント、自然言語などのタスクのトレーニングをサポートします。 OpenRL は PyTorch に基づいて開発されており、強化学習研究コミュニティに使いやすく、柔軟で効率的で持続的に拡張可能なプラットフォームを提供することを目的としています。現在、OpenRL でサポートされている機能は次のとおりです。
- #使いやすく、単一エージェントおよび複数エージェントのトレーニングをサポートするユニバーサル インターフェイス
- 自然言語タスク (対話タスクなど) の強化学習トレーニングをサポート #Hugging Face からのモデルとデータのインポートをサポート
- # LSTM、GRU、Transformer およびその他のモデルをサポート
- 自動混合精度トレーニング、半精度ポリシー ネットワーク データ収集など、さまざまなトレーニング アクセラレーションをサポートします。
- サポート ユーザー定義のトレーニング モデル、報酬モデル、トレーニング データと環境
- サポート 体育館環境
- サポート辞書観察スペース
- wandb や tensorboard などの主流のトレーニング視覚化ツールをサポートX
- 一貫したトレーニング効果を確保しながら、環境内でのシリアルおよび並列トレーニングをサポートします。両方のモードで
- 中国語と英語のドキュメント
- 単体テストとコード カバレッジ テストを提供します
- ブラック コード スタイルと型チェックに準拠
- 現在、OpenRL は GitHub 上のオープン ソースです:

##OpenRL の初めての体験
OpenRL は現在、 pip:<code>pip install openrl</code>
を通じてインストールできます。 conda を通じてインストールすることもできます:
<code>conda install -c openrl openrl</code>
OpenRL は、入力用のシンプルで使いやすいインターフェイスを提供します強化学習の - レベルのユーザー。以下は、PPO アルゴリズムを使用してトレーニングされた CartPole 環境です。例:
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentenv = make ("CartPole-v1", env_num=9) # 创建环境,并设置环境并行数为 9net = Net (env) # 创建神经网络agent = Agent (net) # 初始化智能体agent.train (total_time_steps=20000) # 开始训练,并设置环境运行总步数为 20000</code>
OpenRL を使用してエージェントをトレーニングするには、4 つの簡単な手順のみが必要です: Create環境=> モデルの初期化=> エージェントの初期化=> トレーニングの開始
!# 通常のラップトップで上記のコードを実行すると、エージェントのトレーニングが完了するまでに数秒しかかかりません:
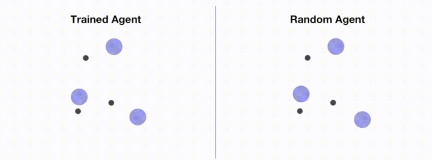
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentdef train ():# 创建 MPE 环境,使用异步环境,即每个智能体独立运行env = make ("simple_spread",env_num=100,asynchrnotallow=True,)# 创建 神经网络,使用 GPU 进行训练net = Net (env, device="cuda")agent = Agent (net) # 初始化训练器# 开始训练agent.train (total_time_steps=5000000)# 保存训练完成的智能体agent.save ("./ppo_agent/")if __name__ == "__main__":train ()</code>
次の図は、エージェントのパフォーマンスを示しています。 OpenRL によるトレーニングの前後:
設定ファイルのロード
構成パラメータが多数ある場合、OpenRL は、ユーザーが独自の構成ファイルを作成してトレーニング パラメータを変更することもサポートします。たとえば、ユーザーは次の構成ファイル (mpe_ppo.yaml) を自分で作成し、その中のパラメーターを変更できます。
<code># mpe_ppo.yamlseed: 0 # 设置 seed,保证每次实验结果一致lr: 7e-4 # 设置学习率episode_length: 25 # 设置每个 episode 的长度use_recurrent_policy: true # 设置是否使用 RNNuse_joint_action_loss: true # 设置是否使用 JRPO 算法use_valuenorm: true # 设置是否使用 value normalization</code>
最後に、ユーザーは、実行時に構成ファイルを指定するだけで済みます。プログラム。:
<code>python train_ppo.py --config mpe_ppo.yaml</code>
训练与测试可视化
此外,通过 OpenRL,用户还可以方便地使用 wandb 来可视化训练过程:

OpenRL 还提供了各种环境可视化的接口,方便用户对并行环境进行可视化。用户可以在创建并行环境的时候设置环境的渲染模式为 "group_human",便可以同时对多个并行环境进行可视化:
<code>env = make ("simple_spread", env_num=9, render_mode="group_human")</code>
此外,用户还可以通过引入 GIFWrapper 来把环境运行过程保存为 gif 动画:
<code>from openrl.envs.wrappers import GIFWrapperenv = GIFWrapper (env, "test_simple_spread.gif")</code>
智能体的保存和加载
OpenRL 提供 agent.save () 和 agent.load () 接口来保存和加载训练好的智能体,并通过 agent.act () 接口来获取测试时的智能体动作:
<code># test_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentfrom openrl.envs.wrappers import GIFWrapper # 用于生成 gifdef test ():# 创建 MPE 环境env = make ( "simple_spread", env_num=4)# 使用 GIFWrapper,用于生成 gifenv = GIFWrapper (env, "test_simple_spread.gif")agent = Agent (Net (env)) # 创建 智能体# 保存智能体agent.save ("./ppo_agent/")# 加载智能体agent.load ('./ppo_agent/')# 开始测试obs, _ = env.reset ()while True:# 智能体根据 observation 预测下一个动作action, _ = agent.act (obs)obs, r, done, info = env.step (action)if done.any ():breakenv.close ()if __name__ == "__main__":test ()</code>
执行该测试代码,便可以在同级目录下找到保存好的环境运行动画文件 (test_simple_spread.gif):
训练自然语言对话任务
最近的研究表明,强化学习也可以用于训练语言模型, 并且能显著提升模型的性能。目前,OpenRL 已经支持自然语言对话任务的强化学习训练。OpenRL 通过模块化设计,支持用户加载自己的数据集 ,自定义训练模型,自定义奖励模型,自定义 wandb 信息输出以及一键开启混合精度训练等。
对于对话任务训练,OpenRL 提供了同样简单易用的训练接口:
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentfrom openrl.configs.config import create_config_parserdef train ():# 添加读取配置文件的代码cfg_parser = create_config_parser ()cfg = cfg_parser.parse_args ()# 创建 NLP 环境env = make ("daily_dialog",env_num=2,asynchrnotallow=True,cfg=cfg,)net = Net (env, cfg=cfg, device="cuda")agent = Agent (net)agent.train (total_time_steps=5000000)if __name__ == "__main__":train ()</code>
可以看出,OpenRL 训练对话任务和其他强化学习任务一样,都是通过创建交互环境的方式进行训练。
加载自定义数据集
训练对话任务,需要对话数据集。这里我们可以使用 Hugging Face 上的公开数据集(用户可以替换成自己的数据集)。加载数据集,只需要在配置文件中传入数据集的名称或者路径即可:
<code># nlp_ppo.yamldata_path: daily_dialog # 数据集路径env: # 环境所用到的参数args: {'tokenizer_path': 'gpt2'} # 读取 tokenizer 的路径seed: 0 # 设置 seed,保证每次实验结果一致lr: 1e-6 # 设置 policy 模型的学习率critic_lr: 1e-6 # 设置 critic 模型的学习率episode_length: 20 # 设置每个 episode 的长度use_recurrent_policy: true</code>
上述配置文件中的 data_path 可以设置为 Hugging Face 数据集名称或者本地数据集路径。此外,环境参数中的 tokenizer_path 用于指定加载文字编码器的 Hugging Face 名称或者本地路径。
自定义训练模型
在 OpenRL 中,我们可以使用 Hugging Face 上的模型来进行训练。为了加载 Hugging Face 上的模型,我们首先需要在配置文件 nlp_ppo.yaml 中添加以下内容:
<code># nlp_ppo.yaml# 预训练模型路径model_path: rajkumarrrk/gpt2-fine-tuned-on-daily-dialog use_share_model: true # 策略网络和价值网络是否共享模型ppo_epoch: 5 # ppo 训练迭代次数data_path: daily_dialog # 数据集名称或者路径env: # 环境所用到的参数args: {'tokenizer_path': 'gpt2'} # 读取 tokenizer 的路径lr: 1e-6 # 设置 policy 模型的学习率critic_lr: 1e-6 # 设置 critic 模型的学习率episode_length: 128 # 设置每个 episode 的长度num_mini_batch: 20</code>
然后在 train_ppo.py 中添加以下代码:
<code># train_ppo.pyfrom openrl.envs.common import makefrom openrl.modules.common import PPONet as Netfrom openrl.runners.common import PPOAgent as Agentfrom openrl.configs.config import create_config_parserfrom openrl.modules.networks.policy_value_network_gpt import (PolicyValueNetworkGPT as PolicyValueNetwork,)def train ():# 添加读取配置文件的代码cfg_parser = create_config_parser ()cfg = cfg_parser.parse_args ()# 创建 NLP 环境env = make ("daily_dialog",env_num=2,asynchrnotallow=True,cfg=cfg,)# 创建自定义神经网络model_dict = {"model": PolicyValueNetwork}net = Net (env, cfg=cfg, model_dict=model_dict)# 创建训练智能体agent = Agent (net)agent.train (total_time_steps=5000000)if __name__ == "__main__":train ()</code>
通过以上简单几行的修改,用户便可以使用 Hugging Face 上的预训练模型进行训练。如果用户希望分别自定义策略网络和价值网络,可以写好 CustomPolicyNetwork 以及 CustomValueNetwork 后通过以下方式从外部传入训练网络:
<code>model_dict = {"policy": CustomPolicyNetwork,"critic": CustomValueNetwork,}net = Net (env, model_dict=model_dict)</code>
自定义奖励模型
通常,自然语言任务的数据集中并不包含奖励信息。因此,如果需要使用强化学习来训练自然语言任务,就需要使用额外的奖励模型来生成奖励。在该对话任务中,我们可以使用一个复合的奖励模型,它包含以下三个部分:
●意图奖励:即当智能体生成的语句和期望的意图接近时,智能体便可以获得更高的奖励。
●METEOR 指标奖励:METEOR 是一个用于评估文本生成质量的指标,它可以用来衡量生成的语句和期望的语句的相似程度。我们把这个指标作为奖励反馈给智能体,以达到优化生成的语句的效果。
●KL 散度奖励:该奖励用来限制智能体生成的文本偏离预训练模型的程度,防止出现 reward hacking 的问题。
我们最终的奖励为以上三个奖励的加权和,其中 KL 散度奖励的系数是随着 KL 散度的大小动态变化的。想在 OpenRL 中使用该奖励模型,用户无需修改训练代码,只需要在 nlp_ppo.yaml 文件中添加 reward_class 参数即可:
<code># nlp_ppo.yamlreward_class:id: NLPReward # 奖励模型名称args: {# 用于意图判断的模型的名称或路径"intent_model": rajkumarrrk/roberta-daily-dialog-intent-classifier,# 用于计算 KL 散度的预训练模型的名称或路径"ref_model": roberta-base, # 用于意图判断的 tokenizer 的名称或路径}</code>
OpenRL 支持用户使用自定义的奖励模型。首先,用户需要编写自定义奖励模型 (需要继承 BaseReward 类)。接着,用户需要注册自定义的奖励模型,即在 train_ppo.py 添加以下代码:
<code># train_ppo.pyfrom openrl.rewards.nlp_reward import CustomRewardfrom openrl.rewards import RewardFactoryRewardFactory.register ("CustomReward", CustomReward)</code>
最后,用户只需要在配置文件中填写自定义的奖励模型即可:
<code>reward_class:id: "CustomReward" # 自定义奖励模型名称args: {} # 用户自定义奖励函数可能用到的参数</code>
自定义训练过程信息输出
OpenRL 还支持用户自定义 wandb 和 tensorboard 的输出内容。例如,在该任务的训练过程中,我们还需要输出各种类型奖励的信息和 KL 散度系数的信息, 用户可以在 nlp_ppo.yaml 文件中加入 vec_info_class 参数来实现:
<code># nlp_ppo.yamlvec_info_class:id: "NLPVecInfo" # 调用 NLPVecInfo 类以打印 NLP 任务中奖励函数的信息# 设置 wandb 信息wandb_entity: openrl # 这里用于指定 wandb 团队名称,请把 openrl 替换为你自己的团队名称experiment_name: train_nlp # 这里用于指定实验名称run_dir: ./run_results/ # 这里用于指定实验数据保存的路径log_interval: 1 # 这里用于指定每隔多少个 episode 上传一次 wandb 数据# 自行填写其他参数...</code>
修改完配置文件后,在 train_ppo.py 文件中启用 wandb:
<code># train_ppo.pyagent.train (total_time_steps=100000, use_wandb=True)</code>
然后执行 python train_ppo.py –config nlp_ppo.yaml,稍后,便可以在 wandb 中看到如下的输出:

从上图可以看到,wandb 输出了各种类型奖励的信息和 KL 散度系数的信息。
如果用户还需要输出其他信息,还可以参考 NLPVecInfo 类 和 VecInfo 类来实现自己的 CustomVecInfo 类。然后,需要在 train_ppo.py 中注册自定义的 CustomVecInfo 类:
<code># train_ppo.py # 注册自定义输出信息类 VecInfoFactory.register ("CustomVecInfo", CustomVecInfo)</code>
最后,只需要在 nlp_ppo.yaml 中填写 CustomVecInfo 类即可启用:
<code># nlp_ppo.yamlvec_info_class:id: "CustomVecInfo" # 调用自定义 CustomVecInfo 类以输出自定义信息</code>
使用混合精度训练加速
OpenRL 还提供了一键开启混合精度训练的功能。用户只需要在配置文件中加入以下参数即可:
<code># nlp_ppo.yamluse_amp: true # 开启混合精度训练</code>
对比评测
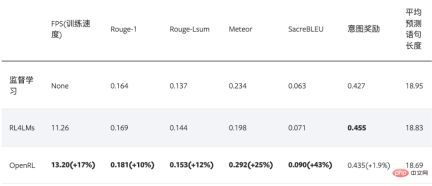
下表格展示了使用 OpenRL 训练该对话任务的结果。结果显示使用强化学习训练后,模型各项指标皆有所提升。另外,从下表可以看出,相较于 RL4LMs , OpenRL 的训练速度更快(在同样 3090 显卡的机器上,速度提升 17% ),最终的性能指标也更好:
最后,对于训练好的智能体,用户可以方便地通过 agent.chat () 接口进行对话:
<code># chat.pyfrom openrl.runners.common import ChatAgent as Agentdef chat ():agent = Agent.load ("./ppo_agent", tokenizer="gpt2",)history = []print ("Welcome to OpenRL!")while True:input_text = input ("> User:")if input_text == "quit":breakelif input_text == "reset":history = []print ("Welcome to OpenRL!")continueresponse = agent.chat (input_text, history)print (f"> OpenRL Agent: {response}")history.append (input_text)history.append (response)if __name__ == "__main__":chat ()</code>
执行 python chat.py ,便可以和训练好的智能体进行对话了:
总结
OpenRL 框架经过了 OpenRL-Lab 的多次迭代并应用于学术研究和 AI 竞赛,目前已经成为了一个较为成熟的强化学习框架。OpenRL-Lab 团队将持续维护和更新 OpenRL,欢迎大家加入我们的开源社区,一起为强化学习的发展做出贡献。更多关于 OpenRL 的信息,可以参考:
- OpenRL 官方仓库:https://github.com/OpenRL-Lab/openrl/
- OpenRL 中文文档:https://openrl-docs.readthedocs.io/zh/latest/
致谢
OpenRL 框架的开发吸取了其他强化学习框架的优点:
- 安定ベースライン 3: https://github.com/DLR-RM/stable-baselines3
- pytorch-a2c-ppo-acktr-gail: https ://github.com/ikostrikov/pytorch-a2c-ppo-acktr-gail
- MAPPO: https://github.com/marlbenchmark/on-policy
- 体育館: https://github.com/Farama-Foundation/Gymnasium
- DI エンジン: https://github.com/opendilab/DI -エンジン/
- ##Tianshou: https://github.com/thu-ml/tianshou
- #RL4LMs: https://github.com/allenai /RL4LMs
現在、OpenRL はまだ継続的な開発と構築の段階にあります。将来的には、OpenRL はさらに多くの機能をオープンソース化する予定です:
- サポート エージェントのセルフ ゲーム トレーニング
- オフライン強化学習、モデル学習、逆強化学習アルゴリズムを追加
- 強化学習環境とアルゴリズムを追加##Deepspeed などのアクセラレーション フレームワークを統合
- マルチマシン分散トレーニングをサポート
- OpenRL Lab チーム
#2022 年 10 月 28 日の時点で、Tizero は Jidi 評価プラットフォームで 1 位にランクされました:

以上がトレーニング速度が 17% 向上 4 番目のパラダイムのオープンソース強化学習研究フレームワークは、シングルおよびマルチエージェントのトレーニングをサポートします。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 摩擦から流れへ:AIがどのように法的作業を変えているかMay 09, 2025 am 11:29 AM
摩擦から流れへ:AIがどのように法的作業を変えているかMay 09, 2025 am 11:29 AM法的技術革命は勢いを増し、法律専門家にAIソリューションを積極的に受け入れるように促しています。 受動的抵抗は、競争力を維持することを目指している人にとってはもはや実行可能な選択肢ではありません。 なぜテクノロジーの採用が重要なのですか? 法律専門家
 これはAIがあなたのことを考えており、あなたについて知っていることですMay 09, 2025 am 11:24 AM
これはAIがあなたのことを考えており、あなたについて知っていることですMay 09, 2025 am 11:24 AM多くの人は、AIとの相互作用が匿名であると仮定しており、人間のコミュニケーションとはまったく対照的です。 ただし、AIはすべてのチャット中にユーザーを積極的にプロファイルします。 すべてのプロンプト、すべての単語が分析および分類されます。 AI Revoのこの重要な側面を探りましょう
 繁栄した、AIの準備ができている企業文化を構築するための7つのステップMay 09, 2025 am 11:23 AM
繁栄した、AIの準備ができている企業文化を構築するための7つのステップMay 09, 2025 am 11:23 AM成功した人工知能戦略は、強力な企業文化サポートから分離することはできません。 Peter Druckerが言ったように、事業運営は人々に依存しており、人工知能の成功も依存しています。 人工知能を積極的に受け入れる組織の場合、AIに適応する企業文化を構築することが重要であり、AI戦略の成功または失敗さえ決定します。 ウェストモンローは最近、繁栄するAIに優しい企業文化を構築するための実用的なガイドをリリースしました。ここにいくつかの重要なポイントがあります。 1. AIの成功モデルを明確にする:まず第一に、AIがどのようにビジネスに力を与えることができるかについての明確なビジョンが必要です。理想的なAI操作文化は、人間とAIシステム間の作業プロセスの自然統合を実現できます。 AIは特定のタスクが得意であり、人間は創造性と判断が得意です
 Netflix New Scroll、Meta AI&#x27;のゲームチェンジャー、Neuralinkは85億ドルで評価されていますMay 09, 2025 am 11:22 AM
Netflix New Scroll、Meta AI&#x27;のゲームチェンジャー、Neuralinkは85億ドルで評価されていますMay 09, 2025 am 11:22 AMメタはAIアシスタントアプリケーションをアップグレードし、ウェアラブルAIの時代が来ています! ChatGPTと競合するように設計されたこのアプリは、テキスト、音声インタラクション、画像生成、Web検索などの標準的なAI機能を提供しますが、初めてジオロケーション機能を追加しました。これは、メタAIがあなたがどこにいるのか、あなたがあなたの質問に答えるときにあなたが何を見ているのかを知っていることを意味します。興味、場所、プロファイル、アクティビティ情報を使用して、これまで不可能な最新の状況情報を提供します。このアプリはリアルタイム翻訳もサポートしており、レイバンメガネのAIエクスペリエンスを完全に変更し、その有用性を大幅に改善しました。 外国映画への関税の賦課は、メディアや文化に対する裸の力の行使です。実装された場合、これはAIと仮想生産に向かって加速します
 AIサイバー犯罪から身を守るために、今日これらの手順を踏んでくださいMay 09, 2025 am 11:19 AM
AIサイバー犯罪から身を守るために、今日これらの手順を踏んでくださいMay 09, 2025 am 11:19 AM人工知能は、サイバー犯罪の分野に革命をもたらし、新しい防御スキルを学ぶことを強いています。サイバー犯罪者は、ディープフォーファリーやインテリジェントなサイバー攻撃などの強力な人工知能技術を、前例のない規模で詐欺と破壊に使用しています。過去1年間、グローバルビジネスの87%がAIサイバー犯罪の標的を絞っていると報告されています。 それでは、どうすればこの賢い犯罪の波の犠牲者になることを避けることができますか?リスクを特定し、個人および組織レベルで保護対策を講じる方法を探りましょう。 サイバー犯罪者が人工知能をどのように使用するか 技術が進むにつれて、犯罪者は、個人、企業、政府を攻撃する新しい方法を常に探しています。人工知能の広範な使用は最新の側面かもしれませんが、その潜在的な害は前例のないものです。 特に、人工知能
 共生ダンス:人工的および自然な知覚のナビゲートループMay 09, 2025 am 11:13 AM
共生ダンス:人工的および自然な知覚のナビゲートループMay 09, 2025 am 11:13 AM人工知能(AI)と人間の知能(NI)の複雑な関係は、フィードバックループとして最もよく理解されています。 人間はAIを作成し、人間の活動によって生成されたデータでそれをトレーニングして、人間の能力を強化または複製します。 このai
 AIの最大の秘密 - クリエイターはそれを理解していません、専門家は分裂しますMay 09, 2025 am 11:09 AM
AIの最大の秘密 - クリエイターはそれを理解していません、専門家は分裂しますMay 09, 2025 am 11:09 AM人類の最近の声明は、最先端のAIモデルを取り巻く理解の欠如を強調しており、専門家の間で激しい議論を引き起こしました。 この不透明度は本物の技術的危機ですか、それとも単により多くのソフへの道の一時的なハードルですか
 Sarvam AIによるBulbul-V2:インドの最高のTTSモデルMay 09, 2025 am 10:52 AM
Sarvam AIによるBulbul-V2:インドの最高のTTSモデルMay 09, 2025 am 10:52 AMインドは、言語の豊かなタペストリーを備えた多様な国であり、地域間のシームレスなコミュニケーションを持続的な課題にしています。ただし、SarvamのBulbul-V2は、高度なテキストからスピーチ(TTS)Tでこのギャップを埋めるのに役立ちます。


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

DVWA
Damn Vulnerable Web App (DVWA) は、非常に脆弱な PHP/MySQL Web アプリケーションです。その主な目的は、セキュリティ専門家が法的環境でスキルとツールをテストするのに役立ち、Web 開発者が Web アプリケーションを保護するプロセスをより深く理解できるようにし、教師/生徒が教室環境で Web アプリケーションを教え/学習できるようにすることです。安全。 DVWA の目標は、シンプルでわかりやすいインターフェイスを通じて、さまざまな難易度で最も一般的な Web 脆弱性のいくつかを実践することです。このソフトウェアは、

PhpStorm Mac バージョン
最新(2018.2.1)のプロフェッショナル向けPHP統合開発ツール

SublimeText3 中国語版
中国語版、とても使いやすい

メモ帳++7.3.1
使いやすく無料のコードエディター

