
ホームページ >テクノロジー周辺機器 >AI >自動運転ハードウェアが事前に組み込まれた後、自動車会社はデータの閉ループをどのように実現するのでしょうか?
自動運転ハードウェアが事前に組み込まれた後、自動車会社はデータの閉ループをどのように実現するのでしょうか?

- 王林転載
- 2023-04-15 09:46:021417ブラウズ
ハードウェア プリエンベディングは、自動運転のトレンドにおいて自動車 OEM によって採用された新しいモデルです。つまり、ハードウェアを車に事前に組み込むことで、後続の車は 継続的にアップグレードするだけで済みます。ソフトウェア を使用すると、ユーザーは、モデルを市場に出すという OEM へのプレッシャーを軽減しながら、より良いユーザー エクスペリエンスを得ることができます。ハードウェアのプリエンベディングと OTA リモート アップグレードの間には必要な関係があり、ハードウェアのプリエンベディングについて説明した後、OTA の原理について説明します。
# その前に、ハードウェアのプリエンベディングも OTA も取り除くことができないトピックについて最初に説明しましょう。研究および調査中にデータのクローズド ループがどのように達成されるかということです。自動車会社が開発?
ハードウェアのプリエンベディングと OTA については、外に出て左に曲がると、船尾の手前でコンテンツが整理されているのが見えます。
本題に戻り、本号の本題に戻ります。 自動運転ハードウェアが事前に組み込まれた後、自動車会社はどのように認識するのかデータ閉ループ?

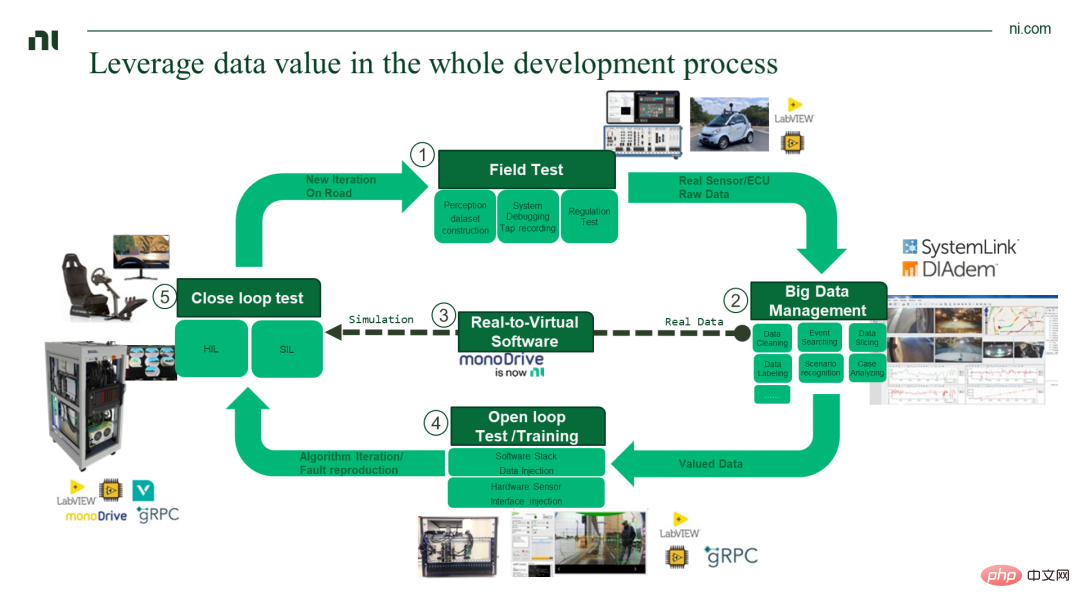
#データクローズドループを実現するためのたった 5 つのステップ
NI は、閉ループ データ ループを作成するためのデータ収集/処理の 5 段階の方法を提案しています:
- ロード テスト
- ビッグデータ管理 ##シナリオ仮想化
- ##データオープンループ再注入
- ##データ クローズド ループ
1.
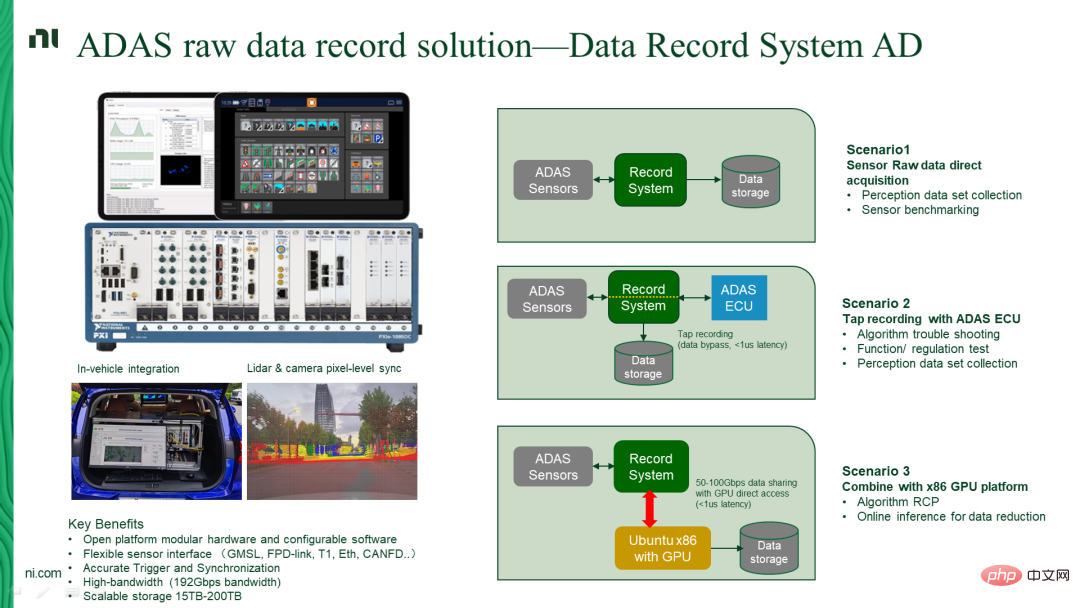
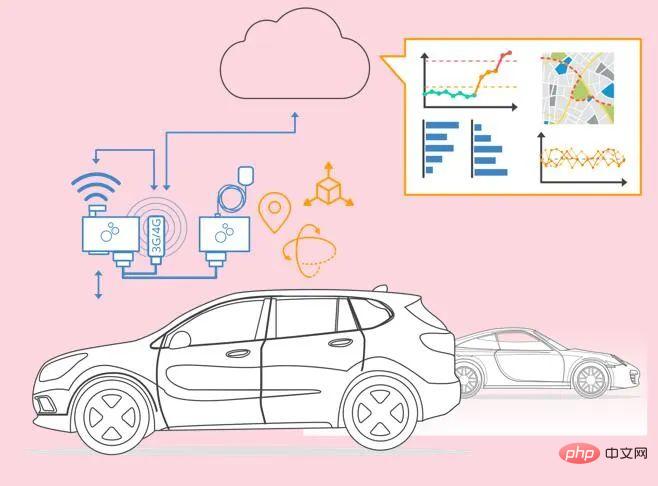
路上テスト - データ記録システム AD路上テストは重要な情報源です車載通信と路車間通信の両方で大量のデータを処理する必要があり、自動試験システムには一般にデータ取得の同期装置とストレージ装置が装備されている必要があります。
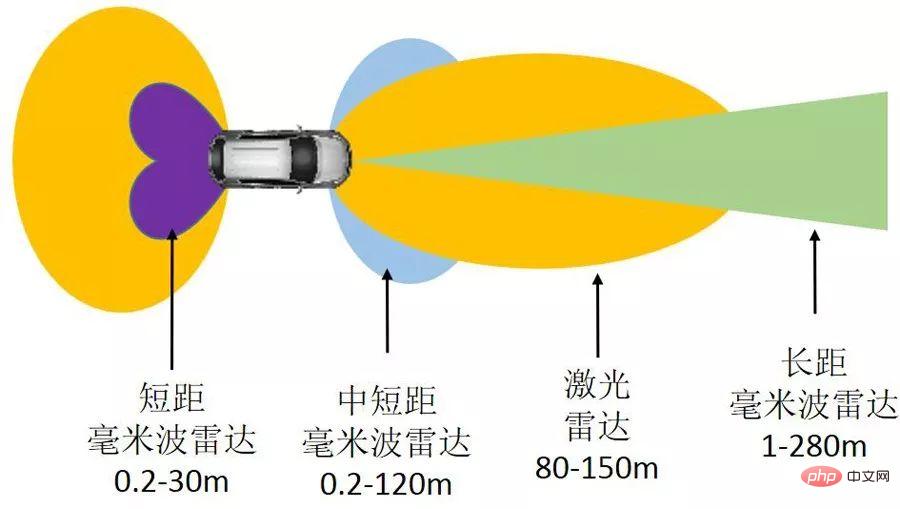
自動運転車にはどのような種類のセンサーが必要ですか?
自動運転車は、センシング、意思決定、制御機能を統合した自動運転車であり、このうちセンシングシステムは、人間のドライバーの視覚、聴覚、触覚などの機能を代替します。 、カメラを統合 レーダーやレーダーなどのセンサーによって収集された大量の交通環境データは、さまざまな交通要素を正確に識別し、自動運転車の意思決定システムをサポートします。
1. カメラ
カメラは、映像の収集方法に応じて、デジタル カメラとアナログ カメラの 2 つのカテゴリに分類されます。デジタル カメラは一般に車両で使用され、ビデオ キャプチャ機器によって生成されたアナログ ビデオ信号をデジタル信号に変換し、コンピュータに保存できます。
アナログ カメラは、特定のビデオ キャプチャ カードを介してのみ、キャプチャしたビデオ信号をデジタル モードに変換し、コンピュータに変換して使用する前に圧縮することができます。
たとえば、私たちが使用している固定電話はアナログ信号であるため、通話中にノイズが発生しやすくなります (現在の音または聞こえないクリアな音)。良好な通話品質を維持するために、当社の携帯電話は電話のアナログ信号をデジタル化しているため、携帯電話間の通話品質は非常にクリアであり、同じ原理を使用してデジタル カメラを使用すると、画像のノイズを効果的に低減し、画質を向上させることができます。イメージング効果。 
一言で要約すると、アナログ ビデオ信号は、特定の時間範囲内で無限に多くの異なる値を持つことができます。デジタルビデオ信号は、アナログ信号に基づいてサンプリング、量子化、符号化することによって形成されます。アナログ信号は信号ノイズや干渉を受けやすいため、徐々にデジタル信号に置き換えられてきました。
 画像出典: ボッシュ公式ウェブサイト
画像出典: ボッシュ公式ウェブサイト
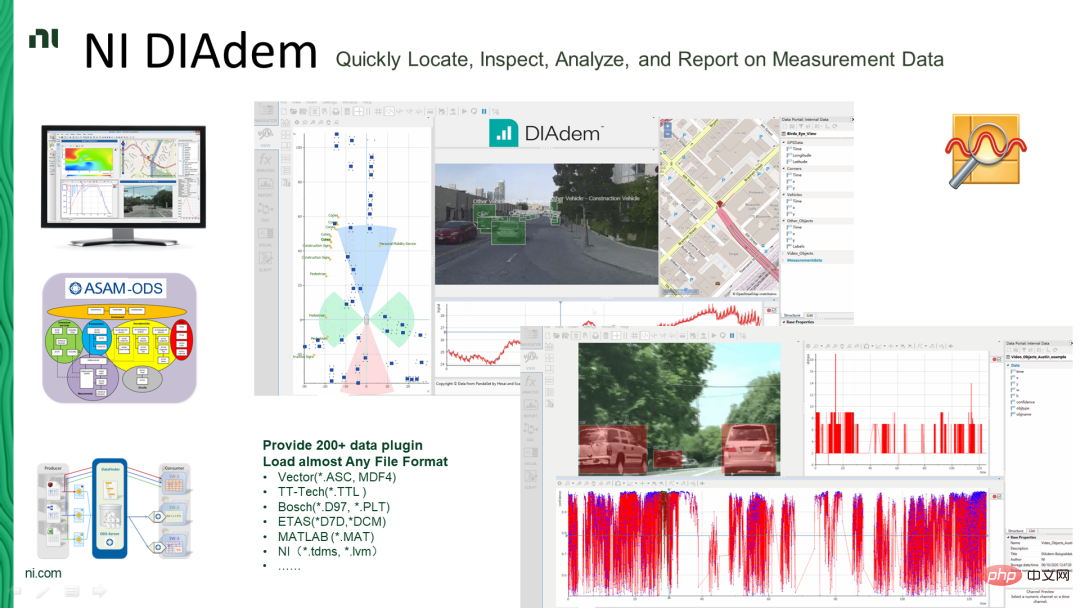
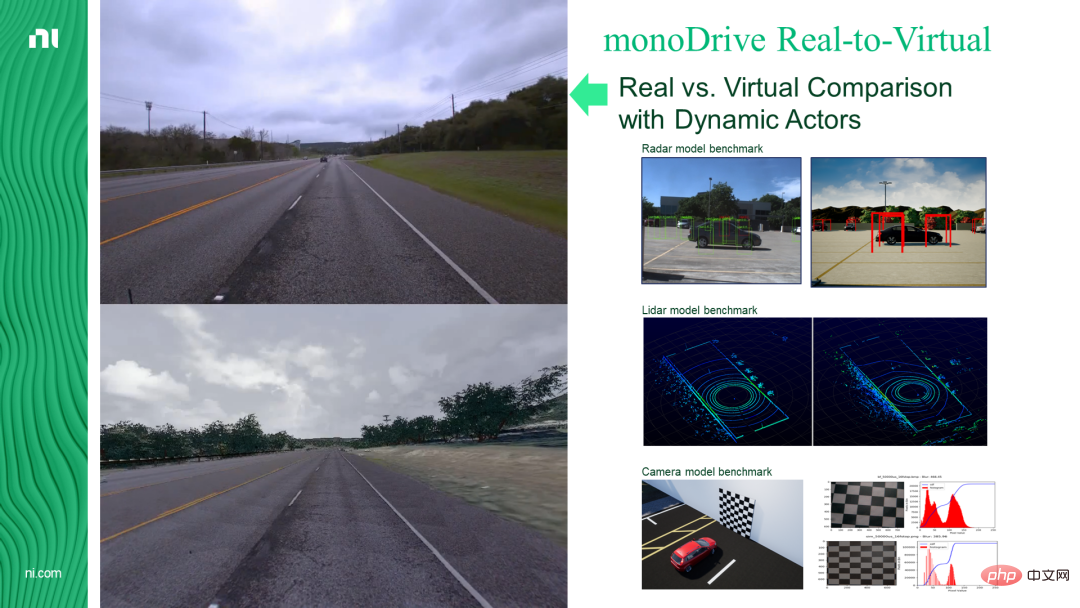
レーダーは周囲の環境を能動的に検知することができ、視覚センサーに比べて外部環境の影響を受けにくいため、自動運転車にとって重要なセンサーの一つです。レーダーは対象物に電磁波を発射し、そのエコーを受信することで対象物の距離や方位、距離変化率などのデータを取得します。レーダーは電磁波の帯域に応じて、ライダー、ミリ波レーダー、超音波レーダーの 3 つのカテゴリに分類できます。 #NI は、複数のカメラ、車両イーサネット、CAN/CANFD、 GPS などのデータ収集は、連続ステージのデータ収集ニーズにも対応できます。たとえば、ADASドメインコントローラーは基本的に研究開発と反復の段階にありますが、データバイパス収集メソッドを使用して、NIのテスト機器をミドルウェアとして使用し、中間からデータを収集することができます。センサーから ECU へのデータリンクが破壊されないことを確認します。さらに、NIのソリューションは15TB~200TBのデータストレージ容量をサポートしています。 # データ収集の精度を確保するには、データの記録に使用される車両に、次の条件を満たすセンサーと測定技術が搭載されている必要があります。特定のレベルのインテリジェントな運転。主なセンサーの種類には、カメラ、ミリ波レーダー、ライダーなどがあります。システムの中心となるのはフュージョン コントローラーで、すべてのセンサーからデータを取得し、現在の環境のモデルをリアルタイムで計算します。このモデルは、駆動、ステアリング、ブレーキ システムの制御に使用されます。 さまざまなセンサー、ECU、通信データ記録のニーズを満たす高性能データ収集システムは、連続動作用に特別に設計され、カメラを測定できる信頼性の高い RAID ストレージ デバイスを提供する必要があります。 、テストフュージョンコントローラーを備えたミリ波レーダー、ライダーの生データには、車両と車両の正確な位置を提供する追加の基準カメラビデオデータと慣性ナビゲーションシステムデータも含まれていますイーサネット、CAN、CANFD、FlexRay、その他多くのバスデータ。 フリート管理、データセンター、端末のデータ使用の 3 つの部分があります。車両からデータセンターにデータを送信するプロセスでは、データ移行などのバックホール方法が一般的に使用され、データ量は車両 1 台あたり 1 日あたり 10 ~ 100 TB に達することがあります。さらに、データセンターは車両をリアルタイムで監視することもできます。これは主に車両の 4G または 5G ネットワークを通じて行われます。 収集システムは、高帯域幅および大容量のデータ ストレージを提供する必要があり、また、データをデータ センターに簡単な方法で送信する方法も考慮する必要があります。たとえば、データは専用のデータ アップロード マシンを介して PB の容量を持つデータ センターに送信されます。 #これらのクラウドベースのツールに加えて、別のデータ マイニング アーティファクトがここにあります。 DIAdem 。クラウドに展開して、道路テストデータ、マルチソースデータ画像、点群、および一部のバスデータに対応するデータ視覚化とデータマイニングを実装できます。 DIAdem は、ASC、MDF4、TTL、MAT など、テスト メーカーのさまざまなタイプのデータ形式と互換性のある 200 個のデータ プラグインを提供できます。 #3. シーン仮想化 - monoDrive シーンの再構築またはセンサーモデリングのプロセス中に、NIは実際のセンサーデータと仮想センサーデータに応じてラベルを付けることができることに言及する価値があります。 #実車データをシミュレーションシナリオに変換するツール 蓄積された大量の実車データをもとに、データドリブンな研究開発モデルを実現します。 ##▲ 集めるシーン変換効果 ツールチェーンは、膨大な量の動的データと静的データの配置と組み合わせをサポートし、ケース設計と実際の条件の間の大きな偏差の問題を解決し、自動運転シミュレーションはより現実世界に近いものになります。 ▲ セマンティック シーン変換ツールチェーン このステップで行う必要があるのは、元のデータを変換することです。 ADAS 認識ソフトウェアへのデータ バックフィード。その一部は、主に一部のモデルのテスト部分のために、ソフトウェア バックフィードを行うためにソフトウェア スタックに直接フィードバックされます。別の部分は実際の ECU に直接フィードバックされ、路上テスト中に発見された状況の一部をより現実的に再現できます。 #NI システムアーキテクチャの構成: ユーザーデータセンター、Linux プラットフォームベースの Replay PC、NI PXI プラットフォーム #例を挙げてください— #ロードテスト中に 80,000 キロメートルを走行すると、何かが突然起こります。誤ったトリガーが発生した場合は、戻って対応するソフトウェアを変更する必要があります。ソフトウェアを修正した後、さらに10万キロ走る必要がありますか?明らかに、それをもう一度やり直すと、多くの時間と経験が無駄になります。 このような課題に直面した場合、効果的な方法は何でしょうか? Wang Shuai 氏は次のように説明しました。「80,000 キロメートルでの最初の路上テスト中に何か問題が発生した場合、以前のすべての走行距離データが記録されていることを確認できます。 を実行し、修正後の元のデータでソフトウェアが正常に動作するかどうかをテストします。これにより、投資が削減されます。 5. クローズド ループ テスト - SIL および HIL2. レーダー
ビッグデータ管理はプロセスの観点から分割されます。
ロード テストを通じてデータを収集した後、データを整理して分類し、シナリオを選択し、最後に実際の路上テストと仮想シミュレーション テストを組み合わせることが必要です。 monoDrive は、高忠実度のセンサー物理モデリングとシーン セマンティック セグメンテーションを実現できるツールであり、クラウド シミュレーション機能もサポートしており、大量のテスト ケースをクラウドにデプロイしてシミュレーションの進行を加速できます。 monoDrive のもう 1 つの重要な利点は、リアルシーンと仮想シーンの自動生成の拡張機能です。


4. データ開ループ再循環 - PXI プラットフォームに基づくシステム アーキテクチャ
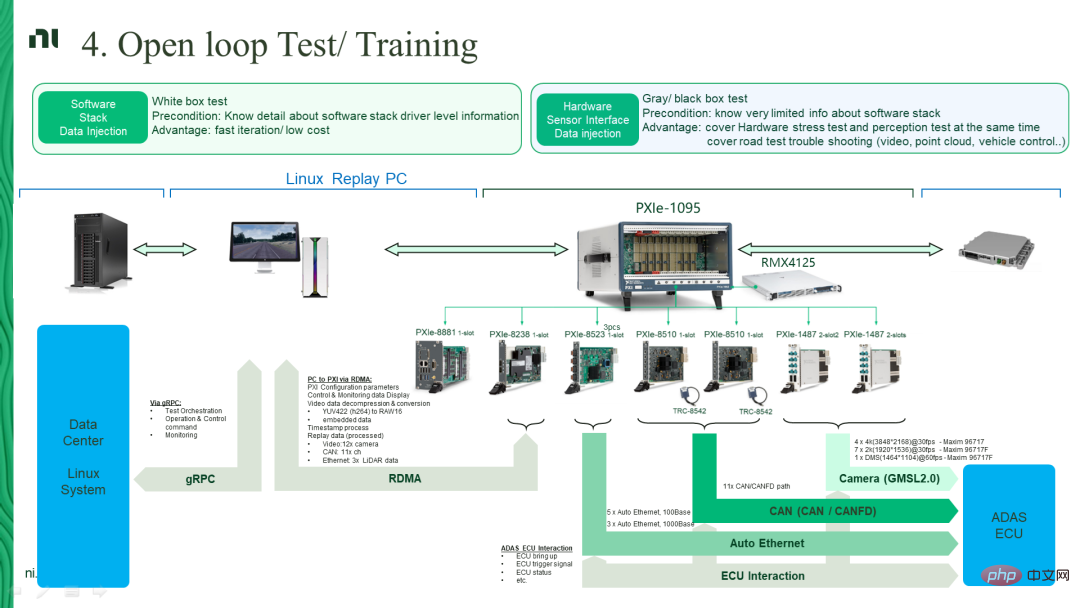
クローズド ループ テストには通常、以下が含まれます。ソフトウェアインザループ (SIL) とハードウェアインザループ (HIL)。ソフトウェアインザループの観点から見ると、NI のソリューションは、monoDrive プラットフォームを使用して、クラウド上にバッチで導入できる環境を提供することです。ハードウェアインザループの観点から見ると、NIのソリューションは、PXIプラットフォームと、カメラ、車両バス、およびデータ同期におけるNIの利点を利用して、複数の種類のセンサに対するデータ注入機能を備えた閉ループシステムを実装することです。
以上が自動運転ハードウェアが事前に組み込まれた後、自動車会社はデータの閉ループをどのように実現するのでしょうか?の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。