



自動車の電動化、知能化、ネットワーク化、シェアリングの継続的な進歩により、ますます多くの新技術や新製品が登場しています スマートカーの分野で見える理由 今日のシーンの根底にある理由何百もの花が咲くということは、テクノロジーの継続的な進歩であり、簡単に言えば、テクノロジーのエンパワーメントです。
車が自律走行できる理由を知りたい場合は、まず融合センシング、車両と道路の連携、大型コンピューティング パワー チップ、高精度地図が何を意味するのかを理解する必要があります。車両のバッテリー寿命の上限を判断するには、まず 4680 バッテリー、コバルトフリーバッテリー、全固体電池、CTP/CTC などのバッテリー技術の現状を調べる必要があります。 、ブレードバッテリー、800V プラットフォームなど、さらに車両の電子および電気アーキテクチャ情報セキュリティ、熱管理システム、ハイブリッド技術、燃料電池技術などの巨大かつ複雑なテクノロジーは、上部構造を決定する基礎のようなものです。将来のスマートカーのこと。
2022 年の自動車業界の新たな発展に期待するとき、3 つの主要なテクノロジーを中心に棚卸しと分析を行ったほうがよいでしょう。1 つは大型コンピューティング パワー チップ、もう 1 つはテクノロジーです。 1 つは 800V 高電圧 SiC プラットフォーム、3 つ目はマルチドメイン統合のための中央コンピューティング アーキテクチャです。これら 3 つのコンテンツは、2022 年に強力な開発と大規模なローンチをもたらすキー テクノロジーです。それぞれについて説明します。
1 1000TOPS の大規模演算能力コンピューティング プラットフォームが量産導入初年度を迎えました
演算能力 TOPS についてよく聞くようになりました。今年はこの言葉を受けて、チップメーカーは自社製品の計算能力指標を向上させるために知恵を絞っており、さまざまな自動車会社も自社の車が車両全体よりも少ない計算能力でパフォーマンスを達成できることを常に誇示しています。このスマートカーの時代では、コンピューティングパワーが舞台の中心に移動していることが、悪いことの唯一の基準となります。それでは、コンピューティングパワーとは正確には何でしょうか?
計算能力は、チップの計算能力を簡単に表します。TOPS は計算能力の単位です。1TOPS は、プロセッサが 1 秒あたり 1 兆回 (10 ^12) 回の演算を実行できることを意味します。それはとても誇張されているように聞こえますか?実際、これを人間の脳にたとえることができます。人間の脳には一般に 100 億個のニューロンがあります。ニューロンが多ければ多いほど、車はより賢くなります。したがって、自動車が人間の思考に代わろうとするなら、それを支援するためにより強力なコンピューティング能力が必要です。道路上の予測不可能な環境を特定して予測し、運転の安全性を向上させます。したがって、チップのコンピューティング能力が大きければ大きいほど、より多くのシナリオや機能を処理し、対応できるようになり、緊急時や複雑なシナリオで私たちを支援する能力が強化されます。
昨年末の広州モーターショーで公開されたサロンメカドラゴンは400TOPSの演算能力を持つ、
NIOのET7/ ET5 には、ミリ波レーダー 5 基、超音波レーダー 12 基、超長距離高精度ライダー 1 基を含む 33 個の高性能センサーが搭載されており、4 つの NVIDIA Drive Orin チップのサポートにより、合計のコンピューティング能力は1016 TOPS;
これはまだ終わっていません。Feimo Zhixing と Qualcomm が開発した「Little Magic Box 3.0」の恩恵により、万里の長城 WEY Mocha のコンピューティング能力は驚くべき 1440 TOPS に達します。 。
しかし、数千 TOPS のコンピューティング能力とは、単一のチップではなく、複数のチップによって統合された超大規模なコンピューティング能力プラットフォームを指すことを明確にする必要があります。コンピューティング プラットフォーム ADAM は 1016TOPS に達しました。これは、単一チップの計算能力が 254TOPS の Orin チップが 4 つあるためです。したがって、現在の主流のチップ分野におけるチップの計算能力の統計的要約も作成し、各チップがどのようなものであるかを確認しました。このようなレベル:

統計表から、現在自動運転の分野では、Nvidia の Orin チップが最大のコンピューティング能力を備えていることがわかります。国内ブランドの中で、黒ごまの華山 2 号 A1000Pro は、シングルチップの演算能力 196TOPS を達成した最初の製品です。黒ごまスマート COM の楊宇新氏はかつて次のように述べています。 「ハードウェアが先にあって、ハードウェアの性能と計算能力だけが用意される。後続のソフトウェアが十分にあれば、反復的なアップグレードや拡張機能の適用を迅速に実現できる。」
そこで、黒ごまの開発が行われました。戦略は、多くのシリンダー数と馬力を追求するパフォーマンス愛好家と同じように、ハードウェアを優先し、可能な限り多くのコンピューティング能力を分散させることです。馬力は利用できないかもしれませんが、利用できるはずです。しかし、すべてには 2 つの側面があります。予約されたコンピューティング能力のスペースは十分ですが、コストは必然的に上昇します。それは、自動車メーカーと消費者が予約されたコンピューティング能力のこの部分に喜んで支払うかどうかによって決まります。

もちろん、国内のチップ工場である Horizon も非常に優れており、昨年リリースされた Journey 5 チップは 128TOPS に達しており、Horizon CEO の Yu Kai 氏は、Horizon は優れていると何度も述べています。単に物理的な計算能力を追求するのではなく、チップ上のディープ ニューラル ネットワーク アルゴリズム、つまり FPS (Frames Per Second) の計算効率をより重視しています。より経済的な方法のように思えます。
また、自動運転チップの分野における外資系大手3社、エヌビディア、クアルコム、インテル・モービルアイの強さは過小評価できず、CES 2022の展示会でもこれら3社は注目を集めています。 NvidiaはオープンなDRIVE Hyperionプラットフォームを採用する企業が増えると発表、VolvoのハイエンドブランドであるPolestar、NIO、Xpeng、Li Auto、R Auto、Zhiji AutoはすべてDRIVE Hyperionを採用しています。
プラットフォームには、完全自動運転車の安全要件を満たす高性能コンピューターとセンサー アーキテクチャが含まれています。最新世代の DRIVE Hyperion 8 は、冗長 NVIDIA DRIVE Orin システムオンチップ、12 台のサラウンド カメラ、9 台のレーダー、12 台の超音波モジュール、1 台の前面 LIDAR、および 3 台の内部認識カメラで構築されています。

このシステムには強力なセキュリティ冗長性があり、コンピュータやセンサーに障害が発生した場合でも、バックアップ デバイスにより自動運転車が乗客を安全に目的地まで連れて行くことができます。目的地。
クアルコムは、自動運転の分野で、L2/L3 レベルの自動運転のニーズを満たすことができる Snapdragon Ride プラットフォームを発売しました。クアルコムは最近、キャデラック LYRIQ の構築におけるゼネラルモーターズの支援や、自動運転プラットフォームの構築における BMW の支援など、多くの協力関係の進展も発表しました。同時に、クアルコムは自動運転分野のニーズの変化に対応するために技術ポートフォリオを拡大していることをショーで発表した。

Intel の Mobileye は、EyeQ Ultra、EyeQ 6L、および EyeQ 6H という 3 つのチップを連続してリリースしました。反撃の警鐘を鳴らしているとも言える。

将来的には、チップの計算能力がスマート カー開発の基礎となるでしょう。計算能力の継続的なブレークスルーによってのみ、スマート カーの開発が可能になります。スマートカーの知能の上限が引き上げられる。
2 800V 高電圧 SiC プラットフォームは自動車会社にとって魔法の武器になります
先ほど述べたチップのコンピューティング能力がインテリジェンスを決定します自動車レベルの場合、次に説明するテクノロジーは、電気自動車の充電速度を決定する機能です。
充電の遅さは多くの電気自動車ユーザーにとって大きな悩みの種であり、多くのユーザーが電気自動車に挑戦することを思いとどまらせる原因でもあることを知っておく必要があります。エネルギー補給効率を大幅に向上させることができるが、コストが高く普及が難しいため開発が制限されている。したがって、急速充電は現在、開発の可能性が最も大きく、主流になる可能性が最も高いソリューションです。
まず、充電速度は充電電力によって決まるということを知ってから、高校の物理の知識を思い出してください 電力 = 電圧 × 電流 つまり、 P = U*I したがって、次のようになります。 充電電力を増加するには、電圧を増加するか電流を増加するかの 2 つの方法しかありません。
そこで、テスラやジークリプトンに代表される大電流派と、ポルシェに代表され多くのメーカーがサポートする高電圧派の2つの技術ルートが開発されました。大電流派について簡単に説明します。この派の最大の難点は、電流の増加による発熱の問題です。また、発熱の公式 Q=I^2Rt も導入します。発熱は次のように指数関数的に増加することがわかります。電流が増加するため、熱をどのように放散するかが開発課題となっているが、テスラを例にとると、250Kwの出力を持つV3スーパーチャージャーで充電すると、最大電流は600Aにも達する可能性があり、その発熱量は想像に難くない。しかし、テスラは水冷式充電ガンを使用しており、さまざまな熱管理ソリューションによりこの問題は解決できます。さらに、テスラが開発の方向性として高電流を選択した理由は、高電圧プラットフォームのコンポーネントにより車両全体のコストが増加するため、コスト管理の問題によるものです。明らかに逆方向です。
それでは、高電圧プラットフォームの話に戻りましょう。従来の電圧プラットフォームは一般に 400V です。現在、高電圧プラットフォームは電圧を 800V 以上に引き上げています。高電圧は大電流による発熱問題を効果的に解決できます。低電流と高電圧には高電圧充電パイルを装備する必要があります」車両側の高電圧適応ソリューション。
充電端子: 充電ガン、コンタクター、ワイヤーハーネス、ヒューズ、その他のコンポーネントを交換し、高電圧耐性材料にアップグレードする必要があります。
車両側: 車両自身の電源バッテリー、エアコンコンプレッサー、電気駆動装置、PTC、OBC、DC/DC、および高電圧プラットフォーム用のその他のコンポーネントを新たに設計および調整する必要があります。 、新しい高電圧プラットフォームに適応します。
充電側のアップグレードは口で言うのは簡単ですが、車両側のコンポーネントのアップグレードには新たな技術サポートが必要です。大電流の問題は発熱であることは前述しましたが、高電圧の制限要因は現在の自動車グレードのコンポーネントである IGBT (絶縁ゲート バイポーラ トランジスタ)、つまり絶縁ゲート バイポーラ トランジスタです。

耐高圧性が不十分なため、既存の部品を代替するために新しい耐圧材料を選択する必要があります。 SiC炭化シリコンです。

SiC デバイスの動作温度は 200°C 以上、動作周波数は 100kHz 以上、耐電圧は最大 20kV です。これらの特性は次のとおりです。従来のシリコンベースのデバイスよりも優れた IGBT; SiC デバイスの体積は IGBT マシン全体の 1/3 ~ 1/5、重量は IGBT の 40% ~ 60% であり、効率も向上します。電気自動車のさまざまな動作条件下では、SiC デバイスは IGBT よりも小さく、消費電力は 60% ~ 80% 削減され、効率は 1% ~ 3% 向上します。
ただし、IGBT は電気自動車のコストの約 7% ~ 10% を占めており、電源バッテリーに次いで 2 番目に高価な電気自動車アクセサリであることにも注意する必要があります。 SiCを使用した場合、同レベルのSiC MOSFETの現状コストはIGBTの8~12倍程度であり、損失もIGBTより大きくなります。したがって、高電圧プラットフォームを使用する場合、コストをどのようにコントロールするかは自動車会社にとっても大きな問題となる。
すでに 800V 高電圧プラットフォームを使用している前述のポルシェ タイカンに加えて、多くの国内ブランドもレイアウトを加速しています。たとえば、新しくリリースされる Xpeng G9 には 800V SiC プラットフォームが搭載され、480Kw の高電圧過給機が搭載されます。

Great Wall Salon Mecha Dragon は、BYD、Dongfeng Lantu、Geely Automobile、GAC Aian、Li Auto、BAIC などの高電圧プラットフォームもサポートしていますJihu などの多くのブランドが高電圧プラットフォームの陣営に加わることになります。
したがって、大電流と高電圧の両方がエネルギー補給の効率を向上させることになりますが、現在では 800V SiC 高電圧プラットフォームが主流になると予想されており、多くの自動車に搭載されています。 「このプラットフォームを念頭に置いて、今年は800V SiC高電圧プラットフォーム開発の初年度でもあります。解決すべき課題はまだ多くありますが、市場の見通しは良好であることがわかります」とても良い。
3 自動車の電子および電気アーキテクチャは分散アーキテクチャからマルチドメイン統合へ発展します
このトピックについて話すには、まず電子および電気アーキテクチャとは何かを理解する必要があります。 E/E アーキテクチャとも呼ばれるこのアーキテクチャは、車両の電子および電気システムの全体的なレイアウト プランを指し、車両内のさまざまなセンサー、プロセッサ、ワイヤリング ハーネス接続、電子および配電システム、およびソフトウェアとハードウェアを統合して実現します。車両の機能、コンピューティング、パワー、エネルギー分配。
一般的に、車両の四輪駆動、エアバッグ、アンチロック ブレーキ システム、リフティング ウィンドウ、ラジオ車内エンターテインメント システムなどの機能を実現するには、次のことが必要です。完全であり、各機能を制御するのはECUと呼ばれるコンポーネントです. ECUとは電子制御ユニットのことであり、「運転用コンピュータ」とも呼ばれます. ECUの機能は比較的単純です. 基本的には、ECUを実装するECUです主要な機能は 1 つであるため、非常に多くの機能を制御するには数十の ECU が必要であることが想像できます。したがって、初期の E/E アーキテクチャでは分散形式であり、各 ECU は CAN および LIN バスを介して接続されていました。自動運転やスマートコックピットの普及により、分散型ECUで制御すると、チップ数、車両コスト、安全性に大きな問題が生じるため、1つまたは複数の「頭脳」を使って制御することになる。車両全体のECUとセンサーのアーキテクチャであるDCU.(Domain Control Unit)、つまり車載ドメインコントローラーが誕生しました。
現在、ドメイン コントローラーは通常、パワートレイン、シャーシ制御、ボディ制御、自動運転、スマート コックピットの 5 つの主要ドメインに分割されています。各ドメインにはメインの高性能 ECU があり、ドメイン内の処理と転送機能を担当します。通常、ドメイン内では低速バスが使用され、ドメイン間では高速バスまたは一般的に使用される車載イーサネット相互接続が使用されます。
こうしたドメイン制御の中でも注目を集めているのが自動運転ドメイン制御です。以前は、ADAS システムには複数の独立した ECU を実装する必要がありました。たとえば、車線逸脱および交通認識 ECU、前方衝突警告 ECU、駐車支援 ECU、死角検出 ECU などです。パノラミックビューECUや後突警報ECUなどを搭載したものもあります。自動運転用のドメインコントローラーが登場したことで、1つのドメインですべての機能を実現できるようになり、シャーシの統合性と機能の集中制御が大幅に向上しました。

#E/E アーキテクチャの将来の開発は、分散ドメイン集中型中央コンピューティングの方向に発展します。
#分散アーキテクチャ: このアーキテクチャでは、ECU と実装された機能の間に対応関係があります。ドメイン集中型アーキテクチャ: このアーキテクチャでは、ECU がさらに統合され、DCU (ドメイン コントローラー ユニット、ドメイン コントローラー) が導入されます。
中央コンピューティング アーキテクチャ: このアーキテクチャでは DCU がさらに統合され、すべての DCU が中央コンピュータに統合されます。機能とコンポーネントの間には対応関係はなく、中央コンピューターが必要に応じてアクチュエーターに指示を与えます。

機能別の統合: 3 つのドメイン アーキテクチャ。 3 ドメイン アーキテクチャでは、車両全体を車両制御 (車両ドメイン コントローラー、VDC)、インテリジェント運転 (ADAS ドメイン コントローラー、ADC)、スマート コックピット (コックピット ドメイン コントローラー、CDC) の 3 つの機能ドメインに分割し、車両の運転と自動運転を実現します。それぞれの運転、インフォテインメントおよびその他の機能。たとえば、フォルクスワーゲンの MEB プラットフォームの E3 アーキテクチャ、BMW の iNEXT モデル アーキテクチャ、ファーウェイの CC アーキテクチャはすべてこのカテゴリに分類されます。
場所による融合: 車の物理的空間に応じて、車全体が左ボディエリア、右ボディエリアなどの複数のエリアに分割されます。ワイヤーハーネスの数を大幅に減らすことができ、より多くの物理スペースを解放できます。テスラやトヨタなどはすべてこのカテゴリーに分類されます。
つまり、今後の発展の方向性はエントロピーを低減する方向でなければならない、分散とは複雑さと高度な混乱を意味する、レベルごとに統合し、最終的には一元管理に移行することでエントロピー値が低減し、コスト削減と効率化を意味し、より多くの機能を拡張できることを意味します。
以上がスマートカーの開発動向と主流技術を振り返る記事の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 AIゲーム開発は、激動の夢想家ポータルでエージェントの時代に入りますMay 02, 2025 am 11:17 AM
AIゲーム開発は、激動の夢想家ポータルでエージェントの時代に入りますMay 02, 2025 am 11:17 AM激動ゲーム:AIエージェントとのゲーム開発に革命をもたらします BlizzardやObsidianなどの業界の巨人の退役軍人で構成されるゲーム開発スタジオであるUpheavalは、革新的なAIを搭載したPlatforでゲームの作成に革命をもたらす態勢を整えています。
 UberはあなたのRobotaxiショップになりたいと思っています、プロバイダーはそれらを許可しますか?May 02, 2025 am 11:16 AM
UberはあなたのRobotaxiショップになりたいと思っています、プロバイダーはそれらを許可しますか?May 02, 2025 am 11:16 AMUberのRobotaxi戦略:自動運転車用の乗車エコシステム 最近のCurbivore Conferenceで、UberのRichard Willderは、Robotaxiプロバイダーの乗車プラットフォームになるための戦略を発表しました。 で支配的な位置を活用します
 ビデオゲームをプレイするAIエージェントは、将来のロボットを変革しますMay 02, 2025 am 11:15 AM
ビデオゲームをプレイするAIエージェントは、将来のロボットを変革しますMay 02, 2025 am 11:15 AMビデオゲームは、特に自律的なエージェントと現実世界のロボットの開発において、最先端のAI研究のための非常に貴重なテストの根拠であることが証明されています。 a
 スタートアップインダストリアルコンプレックス、VC 3.0、およびジェームズクーリエのマニフェストMay 02, 2025 am 11:14 AM
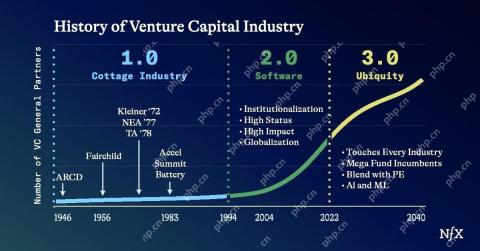
スタートアップインダストリアルコンプレックス、VC 3.0、およびジェームズクーリエのマニフェストMay 02, 2025 am 11:14 AM進化するベンチャーキャピタルの景観の影響は、メディア、財務報告、日常の会話で明らかです。 ただし、投資家、スタートアップ、資金に対する特定の結果はしばしば見落とされています。 ベンチャーキャピタル3.0:パラダイム
 AdobeはAdobe Max London 2025でクリエイティブクラウドとホタルを更新しますMay 02, 2025 am 11:13 AM
AdobeはAdobe Max London 2025でクリエイティブクラウドとホタルを更新しますMay 02, 2025 am 11:13 AMAdobe Max London 2025は、アクセシビリティと生成AIへの戦略的シフトを反映して、Creative Cloud and Fireflyに大幅な更新を提供しました。 この分析には、イベント以前のブリーフィングからの洞察がAdobeのリーダーシップを取り入れています。 (注:ADOB
 すべてのメタがラマコンで発表しましたMay 02, 2025 am 11:12 AM
すべてのメタがラマコンで発表しましたMay 02, 2025 am 11:12 AMMetaのLlamaconアナウンスは、Openaiのような閉じたAIシステムと直接競合するように設計された包括的なAI戦略を紹介し、同時にオープンソースモデルの新しい収益ストリームを作成します。 この多面的なアプローチはBOをターゲットにします
 AIは単なる通常のテクノロジーに過ぎないという提案に関する醸造論争May 02, 2025 am 11:10 AM
AIは単なる通常のテクノロジーに過ぎないという提案に関する醸造論争May 02, 2025 am 11:10 AMこの結論に関して、人工知能の分野には深刻な違いがあります。 「皇帝の新しい服」を暴露する時が来たと主張する人もいれば、人工知能は普通の技術であるという考えに強く反対する人もいます。 それについて議論しましょう。 この革新的なAIブレークスルーの分析は、AIの分野での最新の進歩をカバーする私の進行中のForbesコラムの一部です。 一般的な技術としての人工知能 第一に、この重要な議論の基礎を築くためには、いくつかの基本的な知識が必要です。 現在、人工知能をさらに発展させることに専念する大量の研究があります。全体的な目標は、人工的な一般情報(AGI)を達成し、さらには可能な人工スーパーインテリジェンス(AS)を達成することです
 モデル市民、なぜAI価値が次のビジネスヤードスティックであるのかMay 02, 2025 am 11:09 AM
モデル市民、なぜAI価値が次のビジネスヤードスティックであるのかMay 02, 2025 am 11:09 AM企業のAIモデルの有効性は、現在、重要なパフォーマンス指標になっています。 AIブーム以来、生成AIは、誕生日の招待状の作成からソフトウェアコードの作成まで、すべてに使用されてきました。 これにより、言語modが急増しました


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

mPDF
mPDF は、UTF-8 でエンコードされた HTML から PDF ファイルを生成できる PHP ライブラリです。オリジナルの作者である Ian Back は、Web サイトから「オンザフライ」で PDF ファイルを出力し、さまざまな言語を処理するために mPDF を作成しました。 HTML2FPDF などのオリジナルのスクリプトよりも遅く、Unicode フォントを使用すると生成されるファイルが大きくなりますが、CSS スタイルなどをサポートし、多くの機能強化が施されています。 RTL (アラビア語とヘブライ語) や CJK (中国語、日本語、韓国語) を含むほぼすべての言語をサポートします。ネストされたブロックレベル要素 (P、DIV など) をサポートします。

Safe Exam Browser
Safe Exam Browser は、オンライン試験を安全に受験するための安全なブラウザ環境です。このソフトウェアは、あらゆるコンピュータを安全なワークステーションに変えます。あらゆるユーティリティへのアクセスを制御し、学生が無許可のリソースを使用するのを防ぎます。

MantisBT
Mantis は、製品の欠陥追跡を支援するために設計された、導入が簡単な Web ベースの欠陥追跡ツールです。 PHP、MySQL、Web サーバーが必要です。デモおよびホスティング サービスをチェックしてください。

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

VSCode Windows 64 ビットのダウンロード
Microsoft によって発売された無料で強力な IDE エディター
ホットトピック
 7900
7900 15165114141152130325124829
15165114141152130325124829