


最近、米国のノースウェスタン大学の技術者が、小さくてかわいいカニの形をした史上最小の遠隔制御歩行ロボットを開発しました。
この小さな「カニ」ロボットは幅わずか0.5ミリメートルで、油圧や電気を必要とせずに、曲げたり、ひねったり、這ったり、歩いたり、回転したり、さらにはジャンプしたりすることができます。アイティハウスは、関連する研究成果が「サイエンス・ロボティクス」に掲載されたことを知りました。


報告によると、この種のロボットは形状記憶合金素材で作られており、希望の形状に変化することができます。それは元の形状に戻り、熱が消えると再び元の形状に戻ることができます。

報告によると、熱はレーザーによってもたらされるそうです。レーザーはカニを通して合金を加熱しますが、カニは非常に小さいため、熱の伝わりは非常に速く、1秒間に最大10回(変形を繰り返す)という驚くべき反応が可能です。同時に、走査レーザーの方向が移動方向を決定します。右に走査すると、カニは右に進みます (脚の駆動のタイミングによって決定されます)。研究チームは、彼らの平均速度が 1 秒あたり体の長さの半分であることを確認することができました。

研究者らはまた、走査レーザーを回転させることで回転を誘発できる水中歩行三脚構造、小さなジャンプが可能なコイル状構造、その他 ひねりなどの動きが可能な構造。
製造プロセスは非常に興味深いもので、チームはロボットを平らな構造 (加熱された状態) にしました。次に、平らな構造を伸ばしたゴム基板に接着しました。その後、ゴムが弛緩してロボットのペースを縮め、制御された座屈プロセスでロボットを表面から押し出し、ロボットを最終的な「冷却」位置に導き、加熱されるまでロボットを所定の位置に保持するためにガラスコーティングが適用されます。
「ロボット工学は刺激的な研究分野であり、マイクロロボットの開発は学術探求にとって興味深いテーマです。実験作業を主導したジョン・ロジャース氏は、この新しい技術はさまざまな目的を達成できると述べました。」新しいロボットは、修理や組立産業で使用されるロボットの小型版、または人間の医師が動脈の詰まりを解消したり、出血を止めたり、癌性腫瘍を除去したりするのを助ける「小さな」手術助手と考えてください。これらはすべて低侵襲です。手術。 」、つまり、この種のマイクロロボットは、将来、低侵襲手術の重要な役割を果たすことが期待されています。
このプロジェクトの基礎理論研究を主導する黄永剛博士は、さらに次のように述べています。 「私たちの技術は、さまざまな影響を受ける領域を達成することができます。「地上ロボットにとって、このような小規模なスケールでこれを達成することは非常に困難です」と彼は言いました。 「

言及する価値はありますが、なぜカニなのでしょうか? 「これらの組み立て技術と材料の概念を使用すると、ほぼあらゆるサイズや 3D 形状の歩行ロボットを作成できます。」「しかし、学生たちは這うような横の動きはとても興味深いと思いました」とロジャースは説明した。これは創造的な気まぐれです。 「
以上がノミより小さい世界最小の「カニ」型遠隔操作歩行ロボットを科学者が実証の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 扩散+超分辨率模型强强联合,谷歌图像生成器Imagen背后的技术Apr 10, 2023 am 10:21 AM
扩散+超分辨率模型强强联合,谷歌图像生成器Imagen背后的技术Apr 10, 2023 am 10:21 AM近年来,多模态学习受到重视,特别是文本 - 图像合成和图像 - 文本对比学习两个方向。一些 AI 模型因在创意图像生成、编辑方面的应用引起了公众的广泛关注,例如 OpenAI 先后推出的文本图像模型 DALL・E 和 DALL-E 2,以及英伟达的 GauGAN 和 GauGAN2。谷歌也不甘落后,在 5 月底发布了自己的文本到图像模型 Imagen,看起来进一步拓展了字幕条件(caption-conditional)图像生成的边界。仅仅给出一个场景的描述,Imagen 就能生成高质量、高分辨率
 深度学习撞墙?LeCun与Marcus到底谁捅了马蜂窝Apr 09, 2023 am 09:41 AM
深度学习撞墙?LeCun与Marcus到底谁捅了马蜂窝Apr 09, 2023 am 09:41 AM今天的主角,是一对AI界相爱相杀的老冤家:Yann LeCun和Gary Marcus在正式讲述这一次的「新仇」之前,我们先来回顾一下,两位大神的「旧恨」。LeCun与Marcus之争Facebook首席人工智能科学家和纽约大学教授,2018年图灵奖(Turing Award)得主杨立昆(Yann LeCun)在NOEMA杂志发表文章,回应此前Gary Marcus对AI与深度学习的评论。此前,Marcus在杂志Nautilus中发文,称深度学习已经「无法前进」Marcus此人,属于是看热闹的不
 GPT-4的研究路径没有前途?Yann LeCun给自回归判了死刑Apr 04, 2023 am 11:55 AM
GPT-4的研究路径没有前途?Yann LeCun给自回归判了死刑Apr 04, 2023 am 11:55 AMYann LeCun 这个观点的确有些大胆。 「从现在起 5 年内,没有哪个头脑正常的人会使用自回归模型。」最近,图灵奖得主 Yann LeCun 给一场辩论做了个特别的开场。而他口中的自回归,正是当前爆红的 GPT 家族模型所依赖的学习范式。当然,被 Yann LeCun 指出问题的不只是自回归模型。在他看来,当前整个的机器学习领域都面临巨大挑战。这场辩论的主题为「Do large language models need sensory grounding for meaning and u
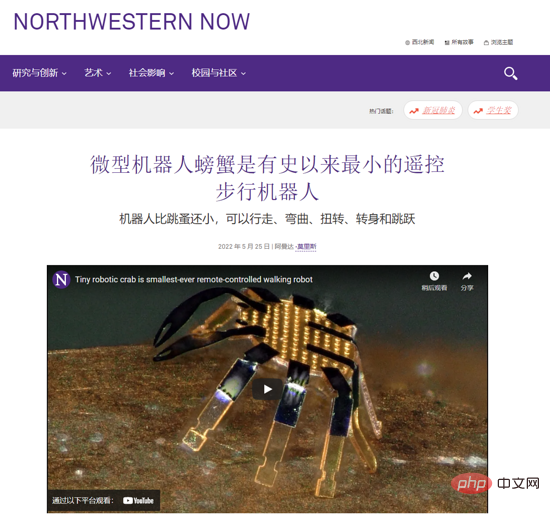 科学家展示世界上有史以来超小的“螃蟹”遥控步行机器人,体积比跳蚤还小Apr 09, 2023 pm 10:41 PM
科学家展示世界上有史以来超小的“螃蟹”遥控步行机器人,体积比跳蚤还小Apr 09, 2023 pm 10:41 PM日前,美国西北大学工程师开发出有史以来最小的遥控步行机器人,它以一种小巧可爱的螃蟹形式出现。这种微小的“螃蟹”机器人宽度只有半毫米,可以弯曲、扭曲、爬行、行走、转弯甚至跳跃,无需液压或电力。IT之家了解到,相关研究成果发表在《科学・机器人》上。据介绍,这种机器人是用形状记忆合金材料所制造的,然后可以变成所需的形状,当你加热后又会变回原来的形状,而热量消失时可以再次弹回变形时的样子。据介绍,其热量是由激光所带来的。激光通过“螃蟹”加热合金,但因为它们非常小,所以热量传播非常快,这使得它们的响应速度
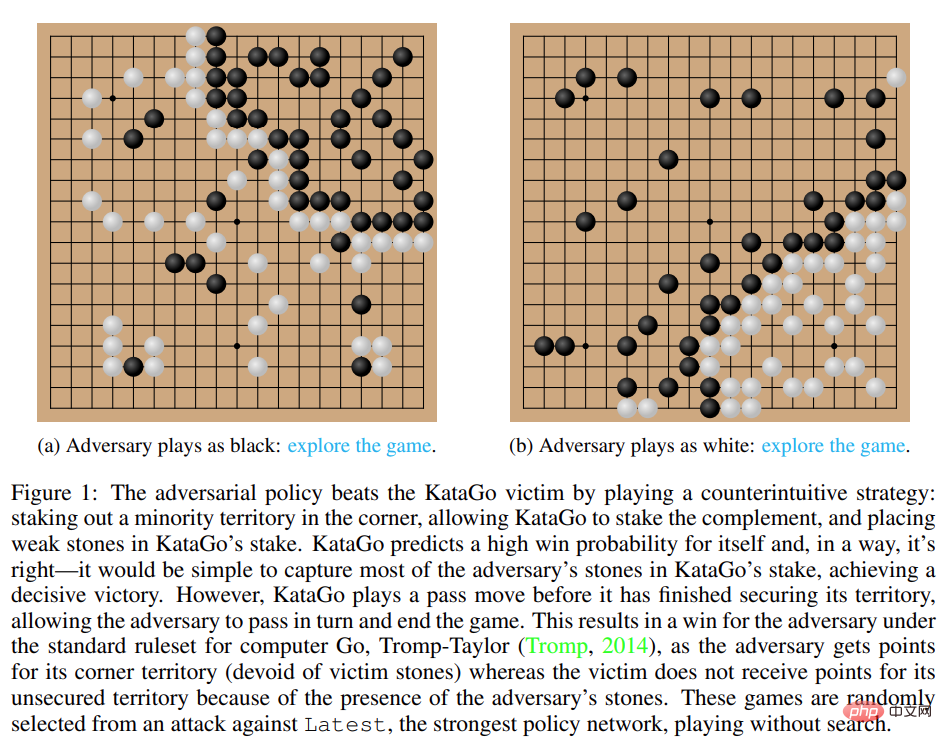 用魔法打败魔法!一个叫板顶级人类棋手的围棋AI输给了它的同类Apr 12, 2023 am 08:40 AM
用魔法打败魔法!一个叫板顶级人类棋手的围棋AI输给了它的同类Apr 12, 2023 am 08:40 AM近几年,自我博弈中的强化学习已经在围棋、国际象棋等一系列游戏中取得了超人的表现。此外,自我博弈的理想化版本还收敛于纳什均衡。纳什均衡在博弈论中非常著名,该理论是由博弈论创始人,诺贝尔奖获得者约翰 · 纳什提出,即在一个博弈过程中,无论对方的策略选择如何,当事人一方都会选择某个确定的策略,则该策略被称作支配性策略。如果任意一位参与者在其他所有参与者的策略确定的情况下,其选择的策略是最优的,那么这个组合就被定义为纳什均衡。之前就有研究表明,自我博弈中看似有效的连续控制策略也可以被对抗策略利用,这表明
 参数少量提升,性能指数爆发!谷歌:大语言模型暗藏「神秘技能」Apr 11, 2023 pm 11:16 PM
参数少量提升,性能指数爆发!谷歌:大语言模型暗藏「神秘技能」Apr 11, 2023 pm 11:16 PM由于可以做一些没训练过的事情,大型语言模型似乎具有某种魔力,也因此成为了媒体和研究员炒作和关注的焦点。当扩展大型语言模型时,偶尔会出现一些较小模型没有的新能力,这种类似于「创造力」的属性被称作「突现」能力,代表我们向通用人工智能迈进了一大步。如今,来自谷歌、斯坦福、Deepmind和北卡罗来纳大学的研究人员,正在探索大型语言模型中的「突现」能力。解码器提示的 DALL-E神奇的「突现」能力自然语言处理(NLP)已经被基于大量文本数据训练的语言模型彻底改变。扩大语言模型的规模通常会提高一系列下游N
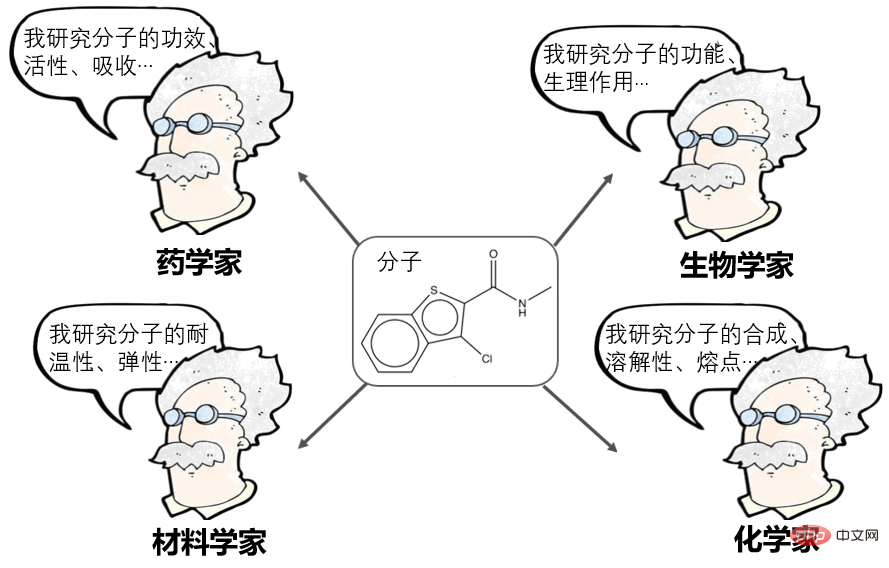 介绍全球首个基于自监督学习的分子图像生成框架ImageMolApr 23, 2023 pm 12:46 PM
介绍全球首个基于自监督学习的分子图像生成框架ImageMolApr 23, 2023 pm 12:46 PM分子是维持物质化学稳定性的最小单位。对分子的研究,是药学、材料学、生物学、化学等众多科学领域的基础性问题。分子的表征学习(MolecularRepresentationLearning)是近年来非常热门的方向,目前可分为诸多门派:计算药学家说:分子可以表示为一串指纹,或者描述符,如上海药物所提出的AttentiveFP,是这方面的杰出代表。NLPer说:分子可以表示为SMILES(序列),然后当作自然语言处理,如百度的X-Mol,是这方面的杰出代表。图神经网络研究者说:分子可以表示为一个图(G
 LeCun, 获得图灵奖的科学家表示支持使用LLM撰写论文。科研界的老将可能更不喜欢ChatGPT?May 09, 2023 am 10:22 AM
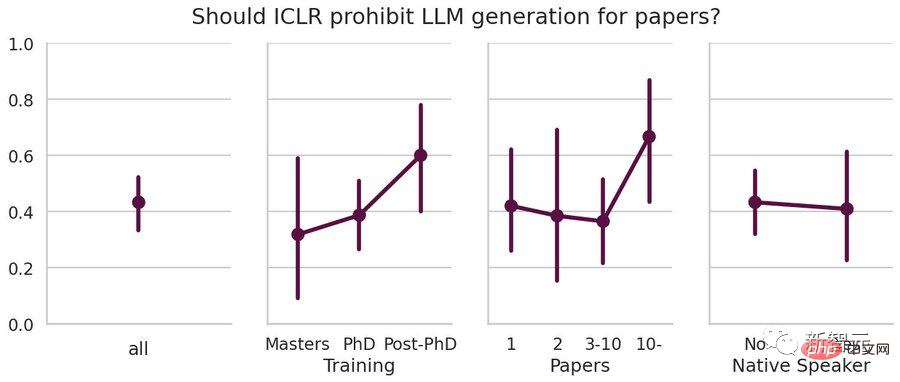
LeCun, 获得图灵奖的科学家表示支持使用LLM撰写论文。科研界的老将可能更不喜欢ChatGPT?May 09, 2023 am 10:22 AMChatGPT发布后,「用语言模型辅助论文写作」到底算作弊剽窃,还是合理使用写作工具,目前各高校、论文会议中仍然没有统一标准,甚至不同的科研人员对ChatGPT都持有不同的态度。有人认为ChatGPT可以提高写作质量,让非英语母语者减少语法错误等;但也有人认为生成的文字并不属于作者,违反学术道德。最近,康奈尔大学的副教授AlexanderRush在参加ICLR2023期间,在会议交流时采访了多位参会人员对「用LLM写论文」的态度。从结果来看,支持与反对占比基本五五开,并且支持和反对的程度相差无几


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

MinGW - Minimalist GNU for Windows
このプロジェクトは osdn.net/projects/mingw に移行中です。引き続きそこでフォローしていただけます。 MinGW: GNU Compiler Collection (GCC) のネイティブ Windows ポートであり、ネイティブ Windows アプリケーションを構築するための自由に配布可能なインポート ライブラリとヘッダー ファイルであり、C99 機能をサポートする MSVC ランタイムの拡張機能が含まれています。すべての MinGW ソフトウェアは 64 ビット Windows プラットフォームで実行できます。

Safe Exam Browser
Safe Exam Browser は、オンライン試験を安全に受験するための安全なブラウザ環境です。このソフトウェアは、あらゆるコンピュータを安全なワークステーションに変えます。あらゆるユーティリティへのアクセスを制御し、学生が無許可のリソースを使用するのを防ぎます。

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

SublimeText3 英語版
推奨: Win バージョン、コードプロンプトをサポート!

mPDF
mPDF は、UTF-8 でエンコードされた HTML から PDF ファイルを生成できる PHP ライブラリです。オリジナルの作者である Ian Back は、Web サイトから「オンザフライ」で PDF ファイルを出力し、さまざまな言語を処理するために mPDF を作成しました。 HTML2FPDF などのオリジナルのスクリプトよりも遅く、Unicode フォントを使用すると生成されるファイルが大きくなりますが、CSS スタイルなどをサポートし、多くの機能強化が施されています。 RTL (アラビア語とヘブライ語) や CJK (中国語、日本語、韓国語) を含むほぼすべての言語をサポートします。ネストされたブロックレベル要素 (P、DIV など) をサポートします。
ホットトピック
 7442
7442 15137152
15137152