


この記事では、主に Python でのキャリブレーションのための OpenCV の使用方法を紹介します。必要な場合は、それを参考にしてください。公式サンプルを用意し、正常に動作できるようにし、自身で収集したデータの実験や解説を行います。
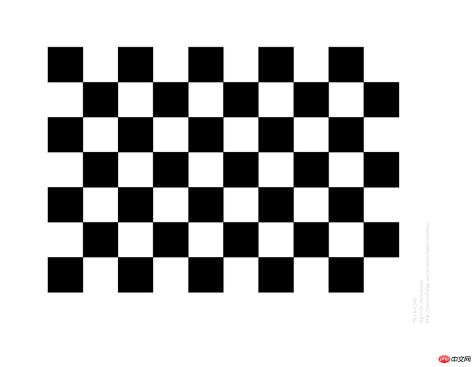
1. 準備 OpenCV は、下の図に示すように、キャリブレーションにチェッカーボードを使用します。カメラをキャリブレーションするには、一連の 3D ポイントとそれに対応する 2D 画像ポイントを入力する必要があります。白黒のチェッカーボードでは、コーナー検出によって 2 次元の画像点を簡単に見つけることができます。現実世界の 3 次元の点はどうなるでしょうか?収集中、カメラを 1 か所に置き、チェッカーボードの校正プレートを別の位置に移動して、写真を撮影しました。したがって、(X,Y,Z) の値を知る必要があります。しかし、簡単に言えば、チェッカーボードが配置されている平面を XY 平面、つまり Z=0 として定義します。キャリブレーション ボードの場合、チェッカーボードの正方形のサイズ (30 mm など) がわかるので、チェッカーボード上のコーナー ポイントの座標を (0,0,0)、(30,0,0)、( 60、 0,0),...、この結果の単位は mm です。
3D 点はオブジェクト点と呼ばれ、2D 画像点は画像点と呼ばれます。
2. チェッカーボードのコーナーポイントの検出 チェッカーボードのテンプレートを見つけるために、openCV の関数 cv2.findChessboardCorners() を使用します。また、使用しているテンプレートの仕様 (8*8 チェッカーボードや 5*5 チェッカーボードなど) をプログラムに伝える必要があります。x 方向と y 方向の数値が等しくないチェッカーボード テンプレートを使用することをお勧めします。次の実験では、10*7 のチェッカーボードを使用します。各正方形の辺の長さは 20 mm、つまり 9*6 個の内部コーナーが含まれます。この関数がテンプレートを検出すると、対応するコーナーポイントを返し、true を返します。もちろん、すべての画像が必要なテンプレートを見つけることができるわけではないため、キャリブレーションに複数の画像を使用できます。チェッカーボードの使用に加えて、ドット マトリックスも使用できます。対応する関数は cv2.findCirclesGrid() です。
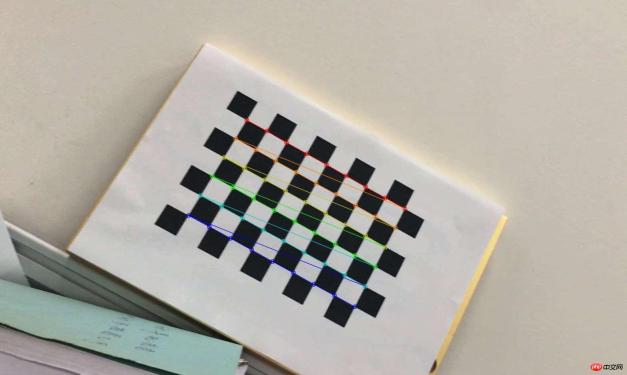
コーナーポイントを見つけたら、cv2.cornerSubPix() を使用して、より正確なコーナーピクセル座標を取得できます。 cv2.drawChessboardCorners() を使用して、表示用に画像上にコーナーを描画することもできます。以下の図に示すように:
3. キャリブレーション 上記の手順を通じて、キャリブレーションに使用する 3 次元点と、画像上の対応する 2 次元点ペアを取得しました。キャリブレーションには cv2.calibrateCamera() を使用します。この関数はキャリブレーション結果、カメラの固有パラメータ行列、歪み係数、回転行列、および平行移動ベクトルを返します。
4. 歪み解消 3 番目のステップでは、画像の歪みを解消する前に、cv.getOptimalNewCameraMatrix() を使用して内部パラメータを最適化することもできます。および歪み係数を設定することにより、フリースケールファクターアルファを定義します。 alpha が 0 に設定されている場合は、歪み除去後に不要なピクセルを削除するトリミングされた内部パラメータと歪み係数が返され、alpha が 1 に設定されている場合は、余分な黒ピクセルを含むトリミングされた内部パラメータと歪み係数が返されます。それを切り取るためのROI。
その後、新しく取得した内部パラメータ行列と歪み係数を使用して、画像の歪みを解消します。歪みを解消するには 2 つの方法があります:
(1) cv2.undistort() を使用しますこれは、上記の関数を直接呼び出すだけで歪みを解消した画像を取得できます。歪みを解消した画像を取得します。コードは次のとおりです:
# undistort dst = cv2.undistort(img, mtx, dist, None, newcameramtx) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
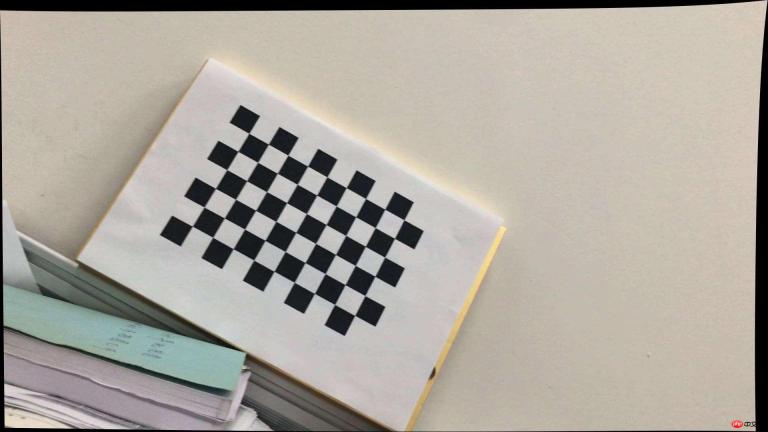
下の図は、画像の歪みを取り除き、黒いピクセルを保持した結果を示しています:
これは 2 段階の方法です。では、まず歪んだ画像から歪んでいない画像へのマッピングを計算し、次にこのマッピング関係を使用して画像の歪みを解消します。
コードは次のとおりです:# undistort mapx,mapy = cv2.initUndistortRectifyMap(mtx,dist,None,newcameramtx,(w,h),5) dst = cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) # crop the image x,y,w,h = roi dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst)
5. 逆投影誤差 逆投影誤差を通じて、結果の品質を評価できます。 0 に近づくほど、結果はより理想的になります。事前に計算された内部パラメータ行列、歪み係数、回転行列、および平行移動ベクトルを通じて、 cv2.projectPoints() を使用して 3 次元点の 2 次元画像への投影を計算し、次に、次によって取得された点間の誤差を計算します。逆投影と画像上で検出された点。最後に、すべてのキャリブレーション画像の平均誤差を計算します。この値が逆投影誤差となります。
コード
すべてのステップのコードは次のとおりです:
#coding:utf-8 import cv2 import numpy as np import glob # 找棋盘格角点 # 阈值 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) #棋盘格模板规格 w = 9 h = 6 # 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0),去掉Z坐标,记为二维矩阵 objp = np.zeros((w*h,3), np.float32) objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2) # 储存棋盘格角点的世界坐标和图像坐标对 objpoints = [] # 在世界坐标系中的三维点 imgpoints = [] # 在图像平面的二维点 images = glob.glob('calib/*.png') for fname in images: img = cv2.imread(fname) gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) # 找到棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, (w,h),None) # 如果找到足够点对,将其存储起来 if ret == True: cv2.cornerSubPix(gray,corners,(11,11),(-1,-1),criteria) objpoints.append(objp) imgpoints.append(corners) # 将角点在图像上显示 cv2.drawChessboardCorners(img, (w,h), corners, ret) cv2.imshow('findCorners',img) cv2.waitKey(1) cv2.destroyAllWindows() # 标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 去畸变 img2 = cv2.imread('calib/00169.png') h, w = img2.shape[:2] newcameramtx, roi=cv2.getOptimalNewCameraMatrix(mtx,dist,(w,h),0,(w,h)) # 自由比例参数 dst = cv2.undistort(img2, mtx, dist, None, newcameramtx) # 根据前面ROI区域裁剪图片 #x,y,w,h = roi #dst = dst[y:y+h, x:x+w] cv2.imwrite('calibresult.png',dst) # 反投影误差 total_error = 0 for i in xrange(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2) total_error += error print "total error: ", total_error/len(objpoints)
関連推奨事項:
OpenCV cv.Mat および .txt ファイルのデータの読み取りおよび書き込み操作
以上がPython はキャリブレーションに OpenCV を使用しますの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 numpyを使用してマルチディメンシャルアレイをどのように作成しますか?Apr 29, 2025 am 12:27 AM
numpyを使用してマルチディメンシャルアレイをどのように作成しますか?Apr 29, 2025 am 12:27 AMNumpyを使用して多次元配列を作成すると、次の手順を通じて実現できます。1)numpy.array()関数を使用して、np.array([[1,2,3]、[4,5,6]])などの配列を作成して2D配列を作成します。 2)np.zeros()、np.ones()、np.random.random()およびその他の関数を使用して、特定の値で満たされた配列を作成します。 3)アレイの形状とサイズの特性を理解して、サブアレイの長さが一貫していることを確認し、エラーを回避します。 4)np.reshape()関数を使用して、配列の形状を変更します。 5)コードが明確で効率的であることを確認するために、メモリの使用に注意してください。
 Numpyアレイの「ブロードキャスト」の概念を説明します。Apr 29, 2025 am 12:23 AM
Numpyアレイの「ブロードキャスト」の概念を説明します。Apr 29, 2025 am 12:23 AMBroadcastinginNumPyisamethodtoperformoperationsonarraysofdifferentshapesbyautomaticallyaligningthem.Itsimplifiescode,enhancesreadability,andboostsperformance.Here'showitworks:1)Smallerarraysarepaddedwithonestomatchdimensions.2)Compatibledimensionsare
 データストレージ用のリスト、array.array、およびnumpy配列を選択する方法を説明します。Apr 29, 2025 am 12:20 AM
データストレージ用のリスト、array.array、およびnumpy配列を選択する方法を説明します。Apr 29, 2025 am 12:20 AMForpythondatastorage、chooseLists forfficability withmixeddatypes、array.arrayformemory-efficienthogeneousnumericaldata、およびnumpyArrays foradvancednumericalcomputing.listSareversatilebuteficient efficient forlargeNumericaldatates;
 Pythonリストを使用することが配列を使用するよりも適切であるシナリオの例を挙げてください。Apr 29, 2025 am 12:17 AM
Pythonリストを使用することが配列を使用するよりも適切であるシナリオの例を挙げてください。Apr 29, 2025 am 12:17 AMpythonlistsarebetterthanarrays formangingdiversedatypes.1)listscanholdelementsofdifferenttypes、2)adearedditionsandremovals、3)theeofferintutiveoperation likeslicing、but4)theearlessememory-effice-hemory-hemory-hemory-hemory-hemory-adlower-dslorededatas。
 Pythonアレイ内の要素にどのようにアクセスしますか?Apr 29, 2025 am 12:11 AM
Pythonアレイ内の要素にどのようにアクセスしますか?Apr 29, 2025 am 12:11 AMtoaccesselementsinapythonarray、useindexing:my_array [2] Accessesthirderement、Returning3.pythonuseszero basedIndexing.1)usepositiveandnegativeindexing:my_list [0] forteefirstelement、my_list [-1] exterarast.2)
 Pythonでタプルの理解が可能ですか?はいの場合、どうしてそうでない場合は?Apr 28, 2025 pm 04:34 PM
Pythonでタプルの理解が可能ですか?はいの場合、どうしてそうでない場合は?Apr 28, 2025 pm 04:34 PM記事では、構文のあいまいさのためにPythonにおけるタプル理解の不可能性について説明します。 Tupple式を使用してTuple()を使用するなどの代替は、Tuppleを効率的に作成するためにお勧めします。(159文字)
 Pythonのモジュールとパッケージとは何ですか?Apr 28, 2025 pm 04:33 PM
Pythonのモジュールとパッケージとは何ですか?Apr 28, 2025 pm 04:33 PMこの記事では、Pythonのモジュールとパッケージ、その違い、および使用について説明しています。モジュールは単一のファイルであり、パッケージは__init__.pyファイルを備えたディレクトリであり、関連するモジュールを階層的に整理します。
 PythonのDocstringとは何ですか?Apr 28, 2025 pm 04:30 PM
PythonのDocstringとは何ですか?Apr 28, 2025 pm 04:30 PM記事では、PythonのDocstrings、それらの使用、および利点について説明します。主な問題:コードのドキュメントとアクセシビリティに関するドキュストリングの重要性。


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

VSCode Windows 64 ビットのダウンロード
Microsoft によって発売された無料で強力な IDE エディター

SublimeText3 英語版
推奨: Win バージョン、コードプロンプトをサポート!

DVWA
Damn Vulnerable Web App (DVWA) は、非常に脆弱な PHP/MySQL Web アプリケーションです。その主な目的は、セキュリティ専門家が法的環境でスキルとツールをテストするのに役立ち、Web 開発者が Web アプリケーションを保護するプロセスをより深く理解できるようにし、教師/生徒が教室環境で Web アプリケーションを教え/学習できるようにすることです。安全。 DVWA の目標は、シンプルでわかりやすいインターフェイスを通じて、さまざまな難易度で最も一般的な Web 脆弱性のいくつかを実践することです。このソフトウェアは、

SublimeText3 中国語版
中国語版、とても使いやすい

SecLists
SecLists は、セキュリティ テスターの究極の相棒です。これは、セキュリティ評価中に頻繁に使用されるさまざまな種類のリストを 1 か所にまとめたものです。 SecLists は、セキュリティ テスターが必要とする可能性のあるすべてのリストを便利に提供することで、セキュリティ テストをより効率的かつ生産的にするのに役立ちます。リストの種類には、ユーザー名、パスワード、URL、ファジング ペイロード、機密データ パターン、Web シェルなどが含まれます。テスターはこのリポジトリを新しいテスト マシンにプルするだけで、必要なあらゆる種類のリストにアクセスできるようになります。
ホットトピック
 7814
7814 15164614140252130025123629
15164614140252130025123629