


前の記事 では、画像ピラミッドについて説明しました。この記事では、アフィン変換について学びます。
アフィン?
任意のアフィン変換は、行列 (線形変化) とベクトル (並進変化) に変換、乗算できます。
実際、アフィンは 2 つの画像間の変換関係です。
たとえば、アフィン変換を通じて画像に対してスケーリング、回転、平行移動などの操作を実行できます。
数学の問題
アフィン問題を解く前に、数学の問題を解いてみましょう。
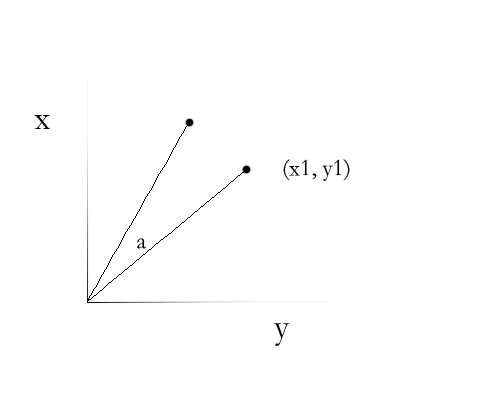
図のように、点(x1,y1)は原点に対して角度aだけ回転しますが、この点はどこに行くのでしょうか?
座標系を極座標系に変更すると、点 (x1, y1) は (r, β) になり、回転すると (r, α β) になります。
デカルト座標系に戻ると、回転した点は (cos(α β) * r, sin(α β) * r) になります。
次に、式 を使用します:
cos(α β)=cosαcosβ-sinαsinβ
sin(α β)=sinαcosβ cosαsinβ
であり、元の点は (cosβ * r, sinβ * r) であるため、新しい点を (x1 * cosα - y1 * sinα, x1 *) として取得するのは簡単です。 sinaα y1 *cosα)。
そこから回転変換式 を導き出すことができます:

この場合、変換は比較的単純で、ベクトル (c, d) を追加するのと同じです。
変換行列関数の実装を取得します
通常、アフィン変換を表すには  行列を使用します。
行列を使用します。
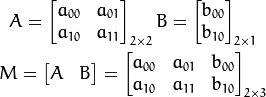
ここで、A は回転スケーリング変換、B は平行移動変換です。この場合、結果 T は次の条件を満たします:
 または
または
![T = M cdot [x, y, 1]^{T}](http://files.jb51.net/file_images/article/201301/201301160852597.png?x-oss-process=image/resize,p_40)
つまり: 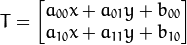
var getRotationArray2D = function (__angle, __x, __y){
var sin = Math.sin(__angle) || 0,
cos = Math.cos(__angle) ||
x = __x | | 0,
y = __y ||
return [cos, -sin, -x,
sin, cos, -y
]; >
このようにして、アフィン変換行列を取得します。
もちろん、原点が左上隅に固定されているため、この実装自体にはいくつかの問題があります。 アフィン変換の実装
var height = __src.row,
width = __src.col,
dst = __dst || new Mat(height, width, CV_RGBA),
sData = new Uint32Array(__src.buffer)、
dData = new Uint32Array(dst.buffer);
var i, j, xs, ys, x, y, nowPix; >for (j = 0, nowPix = 0; j xs = __rotArray[1] * j __rotArray[2]
ys = __rotArray[4] * j __rotArray[5] ;
for(i = 0; i
if(xs > 0 && ys > 0 && xs
x = xs 0; x] ;
}else{
dData[nowPix] = 4278190080 //黒
}
}
} else{
error(arguments.callee, UNSPPORT_DATA_TYPE; /* {line} */);
}
戻り値
};
この関数はまず行列データを 32 ビット形式に変換し、各要素を操作することは各ピクセルを操作することに相当します。
次に、すべての要素を走査し、対応する点に値を割り当てます。
効果


 JavaScriptエンジン:実装の比較Apr 13, 2025 am 12:05 AM
JavaScriptエンジン:実装の比較Apr 13, 2025 am 12:05 AMさまざまなJavaScriptエンジンは、各エンジンの実装原則と最適化戦略が異なるため、JavaScriptコードを解析および実行するときに異なる効果をもたらします。 1。語彙分析:ソースコードを語彙ユニットに変換します。 2。文法分析:抽象的な構文ツリーを生成します。 3。最適化とコンパイル:JITコンパイラを介してマシンコードを生成します。 4。実行:マシンコードを実行します。 V8エンジンはインスタントコンピレーションと非表示クラスを通じて最適化され、Spidermonkeyはタイプ推論システムを使用して、同じコードで異なるパフォーマンスパフォーマンスをもたらします。
 ブラウザを超えて:現実世界のJavaScriptApr 12, 2025 am 12:06 AM
ブラウザを超えて:現実世界のJavaScriptApr 12, 2025 am 12:06 AM現実世界におけるJavaScriptのアプリケーションには、サーバー側のプログラミング、モバイルアプリケーション開発、モノのインターネット制御が含まれます。 2。モバイルアプリケーションの開発は、ReactNativeを通じて実行され、クロスプラットフォームの展開をサポートします。 3.ハードウェアの相互作用に適したJohnny-Fiveライブラリを介したIoTデバイス制御に使用されます。
 next.jsを使用してマルチテナントSaaSアプリケーションを構築する(バックエンド統合)Apr 11, 2025 am 08:23 AM
next.jsを使用してマルチテナントSaaSアプリケーションを構築する(バックエンド統合)Apr 11, 2025 am 08:23 AM私はあなたの日常的な技術ツールを使用して機能的なマルチテナントSaaSアプリケーション(EDTECHアプリ)を作成しましたが、あなたは同じことをすることができます。 まず、マルチテナントSaaSアプリケーションとは何ですか? マルチテナントSaaSアプリケーションを使用すると、Singの複数の顧客にサービスを提供できます
 next.jsを使用してマルチテナントSaaSアプリケーションを構築する方法(フロントエンド統合)Apr 11, 2025 am 08:22 AM
next.jsを使用してマルチテナントSaaSアプリケーションを構築する方法(フロントエンド統合)Apr 11, 2025 am 08:22 AMこの記事では、許可によって保護されたバックエンドとのフロントエンド統合を示し、next.jsを使用して機能的なedtech SaaSアプリケーションを構築します。 FrontEndはユーザーのアクセス許可を取得してUIの可視性を制御し、APIリクエストがロールベースに付着することを保証します
 JavaScript:Web言語の汎用性の調査Apr 11, 2025 am 12:01 AM
JavaScript:Web言語の汎用性の調査Apr 11, 2025 am 12:01 AMJavaScriptは、現代のWeb開発のコア言語であり、その多様性と柔軟性に広く使用されています。 1)フロントエンド開発:DOM操作と最新のフレームワーク(React、Vue.JS、Angularなど)を通じて、動的なWebページとシングルページアプリケーションを構築します。 2)サーバー側の開発:node.jsは、非ブロッキングI/Oモデルを使用して、高い並行性とリアルタイムアプリケーションを処理します。 3)モバイルおよびデスクトップアプリケーション開発:クロスプラットフォーム開発は、反応および電子を通じて実現され、開発効率を向上させます。
 JavaScriptの進化:現在の傾向と将来の見通しApr 10, 2025 am 09:33 AM
JavaScriptの進化:現在の傾向と将来の見通しApr 10, 2025 am 09:33 AMJavaScriptの最新トレンドには、TypeScriptの台頭、最新のフレームワークとライブラリの人気、WebAssemblyの適用が含まれます。将来の見通しは、より強力なタイプシステム、サーバー側のJavaScriptの開発、人工知能と機械学習の拡大、およびIoTおよびEDGEコンピューティングの可能性をカバーしています。
 javascriptの分解:それが何をするのか、なぜそれが重要なのかApr 09, 2025 am 12:07 AM
javascriptの分解:それが何をするのか、なぜそれが重要なのかApr 09, 2025 am 12:07 AMJavaScriptは現代のWeb開発の基礎であり、その主な機能には、イベント駆動型のプログラミング、動的コンテンツ生成、非同期プログラミングが含まれます。 1)イベント駆動型プログラミングにより、Webページはユーザー操作に応じて動的に変更できます。 2)動的コンテンツ生成により、条件に応じてページコンテンツを調整できます。 3)非同期プログラミングにより、ユーザーインターフェイスがブロックされないようにします。 JavaScriptは、Webインタラクション、シングルページアプリケーション、サーバー側の開発で広く使用されており、ユーザーエクスペリエンスとクロスプラットフォーム開発の柔軟性を大幅に改善しています。
 pythonまたはjavascriptの方がいいですか?Apr 06, 2025 am 12:14 AM
pythonまたはjavascriptの方がいいですか?Apr 06, 2025 am 12:14 AMPythonはデータサイエンスや機械学習により適していますが、JavaScriptはフロントエンドとフルスタックの開発により適しています。 1. Pythonは、簡潔な構文とリッチライブラリエコシステムで知られており、データ分析とWeb開発に適しています。 2。JavaScriptは、フロントエンド開発の中核です。 node.jsはサーバー側のプログラミングをサポートしており、フルスタック開発に適しています。


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

AI Hentai Generator
AIヘンタイを無料で生成します。

人気の記事
ホットツール

mPDF
mPDF は、UTF-8 でエンコードされた HTML から PDF ファイルを生成できる PHP ライブラリです。オリジナルの作者である Ian Back は、Web サイトから「オンザフライ」で PDF ファイルを出力し、さまざまな言語を処理するために mPDF を作成しました。 HTML2FPDF などのオリジナルのスクリプトよりも遅く、Unicode フォントを使用すると生成されるファイルが大きくなりますが、CSS スタイルなどをサポートし、多くの機能強化が施されています。 RTL (アラビア語とヘブライ語) や CJK (中国語、日本語、韓国語) を含むほぼすべての言語をサポートします。ネストされたブロックレベル要素 (P、DIV など) をサポートします。

SecLists
SecLists は、セキュリティ テスターの究極の相棒です。これは、セキュリティ評価中に頻繁に使用されるさまざまな種類のリストを 1 か所にまとめたものです。 SecLists は、セキュリティ テスターが必要とする可能性のあるすべてのリストを便利に提供することで、セキュリティ テストをより効率的かつ生産的にするのに役立ちます。リストの種類には、ユーザー名、パスワード、URL、ファジング ペイロード、機密データ パターン、Web シェルなどが含まれます。テスターはこのリポジトリを新しいテスト マシンにプルするだけで、必要なあらゆる種類のリストにアクセスできるようになります。

EditPlus 中国語クラック版
サイズが小さく、構文の強調表示、コード プロンプト機能はサポートされていません

SublimeText3 Linux 新バージョン
SublimeText3 Linux 最新バージョン

Dreamweaver Mac版
ビジュアル Web 開発ツール

