


このチュートリアルでは、エリートの強調表示、障害物の複雑さの増加、「到達」カウンター、クロスオーバー ブリーディングなどの機能を追加することで、遺伝的アルゴリズムのシミュレーションを強化します。改善点を詳しく見てみましょう。
パート 1: 視覚的な強化と障害物の複雑さ
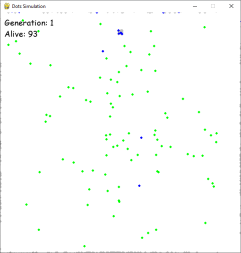
シミュレーションは、エリート ドット (前世代で最高のパフォーマンスを発揮したドット) を青色に着色することで視覚的に区別できるようにアップグレードされました。 これは、is_elite ブール値パラメータを Dot クラスの draw メソッドに追加し、条件付きで青色を適用することで実現されます。 Population クラスの draw メソッドは、ドットが elites リストにあるかどうかに基づいてこのブール値を渡すように変更されます。
クラスと Obstacle クラスは別の Goal ファイルに移動され、コードの整理が促進されます。 obstacles.py ファイルは、画面サイズや人口サイズなどのグローバル変数を保持するために導入され、ファイル間の冗長性を防ぎます。 複数の障害物構成 (constants.py、OBSTACLES0、OBSTACLES1、OBSTACLES2、OBSTACLES3、OBSTACLES4) が OBSTACLES5 で定義されており、異なるチャレンジ レベル間で簡単に切り替えることができます。 メイン スクリプトはこれらの構成をインポートし、必要な構成を選択します。 リスト内包表記 (obstacles.py など) によって生成された障害物リストを使用する場合でも、ゴールが常に存在することを確認するチェックが追加されます。OBSTACLES4
クラスの generate_next_generation メソッドを変更することで実装されます。 メインループは、このカウントを画面に表示します。Population

パート 2: シングルポイント クロスオーバーの実装
シミュレーションは、子孫生成のための複製から単一点交叉に移行します。 crossover クラスメソッドが Dot クラスに追加されます。このメソッドは、2 つの親ドットを入力として受け取り、ランダムな交差点を選択し、各親の動きシーケンス (方向ベクトルのリストとして表される) の一部を結合することによって 2 つの子を作成します。 generate_next_generation メソッドは、このクロスオーバー メソッドを利用するように更新され、単一のクローンではなく子孫のペアを生成します。 突然変異は子孫に適用され続けます。

改良されたシミュレーションでは、強化された視覚化、調整可能な難易度、より洗練された繁殖メカニズムが提供され、遺伝的アルゴリズムのより堅牢で洞察力に富んだ例となっています。今後の改善点には、保存/ロード機能と速度の最適化が含まれます。 著者は、さらなるコラボレーションのために Discord コミュニティに参加することも推奨しています。
以上が遺伝的アルゴリズムを使用したドット シミュレーション - パート 2の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。

 Pythonアレイで実行できる一般的な操作は何ですか?Apr 26, 2025 am 12:22 AM
Pythonアレイで実行できる一般的な操作は何ですか?Apr 26, 2025 am 12:22 AMPythonArraysSupportVariousoperations:1)SlicingExtractsSubsets、2)Appending/ExtendingAdddesements、3)inSertingSelementSatspecificpositions、4)remvingingDeletesements、5)sorting/verversingsorder、and6)listenionsionsionsionsionscreatenewlistsebasedexistin
 一般的に使用されているnumpy配列はどのようなアプリケーションにありますか?Apr 26, 2025 am 12:13 AM
一般的に使用されているnumpy配列はどのようなアプリケーションにありますか?Apr 26, 2025 am 12:13 AMnumpyarraysAressertialentionsionceivationsefirication-efficientnumericalcomputations andDatamanipulation.theyarecrucialindatascience、mashineelearning、物理学、エンジニアリング、および促進可能性への適用性、scaledatiencyを効率的に、forexample、infinancialanalyyy
 Pythonのリスト上の配列を使用するのはいつですか?Apr 26, 2025 am 12:12 AM
Pythonのリスト上の配列を使用するのはいつですか?Apr 26, 2025 am 12:12 AMUseanArray.ArrayOverAlistinPythonは、Performance-criticalCode.1)homogeneousdata:araysavememorywithpedelements.2)Performance-criticalcode:Araysofterbetterbetterfornumerumerumericaleperations.3)interf
 すべてのリスト操作は配列でサポートされていますか?なぜまたはなぜですか?Apr 26, 2025 am 12:05 AM
すべてのリスト操作は配列でサポートされていますか?なぜまたはなぜですか?Apr 26, 2025 am 12:05 AMいいえ、notallistoperationSaresuptedbyarrays、andviceversa.1)arraysdonotsupportdynamicoperationslikeappendorintorintorinsertizizing、whosimpactsporformance.2)リスト
 Pythonリストの要素にどのようにアクセスしますか?Apr 26, 2025 am 12:03 AM
Pythonリストの要素にどのようにアクセスしますか?Apr 26, 2025 am 12:03 AMtoaccesselementsinapythonlist、useindexing、negativeindexing、slicing、oriteration.1)indexingstartsat0.2)negativeindexingAcsesess.3)slicingextractStions.4)reterationSuseSuseSuseSuseSeSeS forLoopseCheckLentlentlentlentlentlentlenttodExeror。
 Pythonを使用した科学コンピューティングでアレイはどのように使用されていますか?Apr 25, 2025 am 12:28 AM
Pythonを使用した科学コンピューティングでアレイはどのように使用されていますか?Apr 25, 2025 am 12:28 AMArraysinpython、特にvianumpy、arecrucialinscientificComputing fortheirefficienty andversitility.1)彼らは、fornumericaloperations、data analysis、andmachinelearning.2)numpy'simplementation incensuresfasteroperationsthanpasteroperations.3)arayableminablecickick
 同じシステムで異なるPythonバージョンをどのように処理しますか?Apr 25, 2025 am 12:24 AM
同じシステムで異なるPythonバージョンをどのように処理しますか?Apr 25, 2025 am 12:24 AMPyenv、Venv、およびAnacondaを使用して、さまざまなPythonバージョンを管理できます。 1)Pyenvを使用して、複数のPythonバージョンを管理します。Pyenvをインストールし、グローバルバージョンとローカルバージョンを設定します。 2)VENVを使用して仮想環境を作成して、プロジェクトの依存関係を分離します。 3)Anacondaを使用して、データサイエンスプロジェクトでPythonバージョンを管理します。 4)システムレベルのタスク用にシステムPythonを保持します。これらのツールと戦略を通じて、Pythonのさまざまなバージョンを効果的に管理して、プロジェクトのスムーズな実行を確保できます。
 標準のPythonアレイでnumpyアレイを使用することの利点は何ですか?Apr 25, 2025 am 12:21 AM
標準のPythonアレイでnumpyアレイを使用することの利点は何ですか?Apr 25, 2025 am 12:21 AMnumpyarrayshaveveraladvantages-averstandardpythonarrays:1)thealmuchfasterduetocベースのインプレンテーション、2)アレモレメモリ効率、特にlargedatasets、および3)それらは、拡散化された、構造化された形成術科療法、


ホットAIツール

Undresser.AI Undress
リアルなヌード写真を作成する AI 搭載アプリ

AI Clothes Remover
写真から衣服を削除するオンライン AI ツール。

Undress AI Tool
脱衣画像を無料で

Clothoff.io
AI衣類リムーバー

Video Face Swap
完全無料の AI 顔交換ツールを使用して、あらゆるビデオの顔を簡単に交換できます。

人気の記事
ホットツール

メモ帳++7.3.1
使いやすく無料のコードエディター

SAP NetWeaver Server Adapter for Eclipse
Eclipse を SAP NetWeaver アプリケーション サーバーと統合します。

ZendStudio 13.5.1 Mac
強力な PHP 統合開発環境

MantisBT
Mantis は、製品の欠陥追跡を支援するために設計された、導入が簡単な Web ベースの欠陥追跡ツールです。 PHP、MySQL、Web サーバーが必要です。デモおよびホスティング サービスをチェックしてください。

PhpStorm Mac バージョン
最新(2018.2.1)のプロフェッショナル向けPHP統合開発ツール
ホットトピック
 7719
7719 15164114139652128925123329
15164114139652128925123329