
ホームページ >テクノロジー周辺機器 >AI >ロボットが手の強さを習得し、安全に家事を行うことはどれほど難しいでしょうか? 1X 人工知能副社長が詳細な説明を執筆
ロボットが手の強さを習得し、安全に家事を行うことはどれほど難しいでしょうか? 1X 人工知能副社長が詳細な説明を執筆

- WBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBOYWBオリジナル
- 2024-09-02 16:34:12930ブラウズ


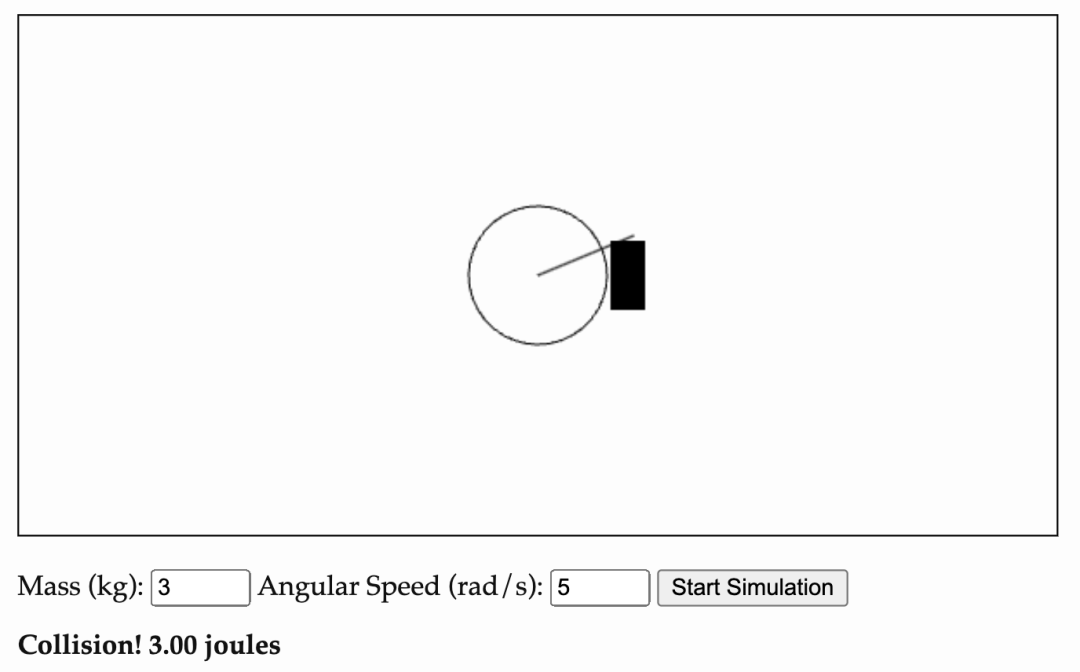
 によると、I は慣性モーメント、ω は角速度です。レバーには質量がないと想定されているため、システムの慣性は固定シリンダーの慣性と同等です:
によると、I は慣性モーメント、ω は角速度です。レバーには質量がないと想定されているため、システムの慣性は固定シリンダーの慣性と同等です:  。値を代入すると、I = 0.24 kg⋅m^2 となります。したがって、このシステムの回転運動エネルギーはさらに 3 ジュールと計算できます。
。値を代入すると、I = 0.24 kg⋅m^2 となります。したがって、このシステムの回転運動エネルギーはさらに 3 ジュールと計算できます。 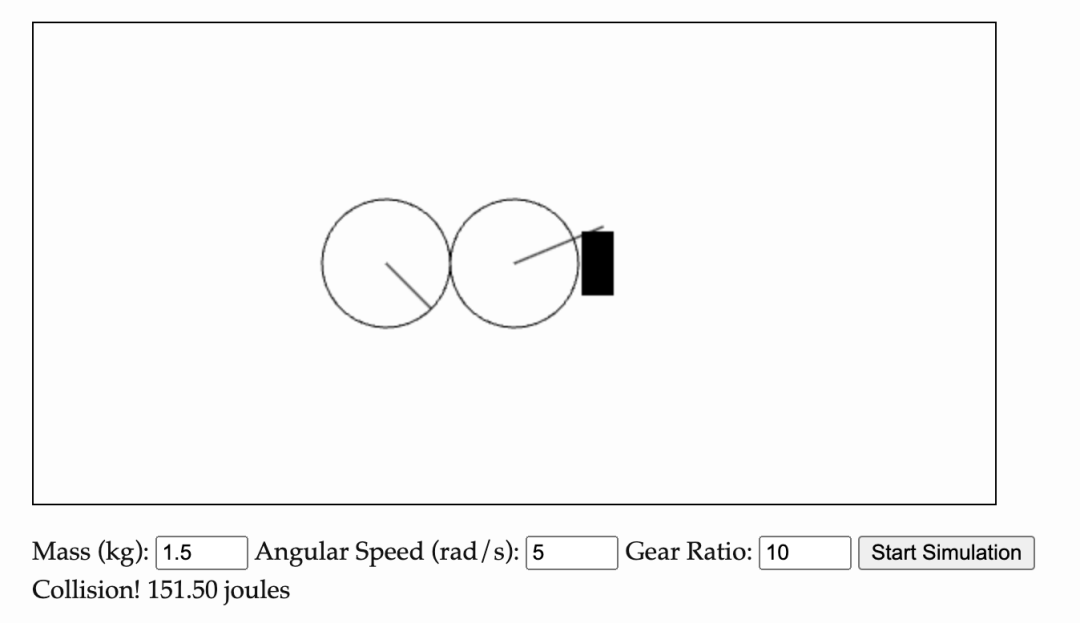

이유는 기어박스가 중요한 기계적 지렛대를 제공하기 때문입니다. 많은 모터가 단독으로 작동할 때 충분한 토크를 제공할 수 없기 때문에 엔지니어는 고속 모터에 기어를 설치합니다. 필요한 토크를 위해 희생되었습니다.
이런 종류의 기어 시스템은 "견고"하며 "역구동"이 불가능합니다. 일단 기어가 회전하기 시작하면 서로 단단히 물려 회전하기가 어렵습니다. 돌아서세요. 따라서 기어박스의 반대쪽 끝에서는 고속 모터에서 생성되는 회전력에 저항하기 위해 더 많은 힘이 가해져야 합니다.
원엑스테크놀로지스는 위와 같은 고려 사항을 바탕으로 변속기 시스템의 안전성을 극대화하기 위해 지난 10년간 고토크, 저속 모터 제조에 전념해 왔습니다. NEO 로봇은 모터와 구동 시스템을 사용하여 기어비가 더 작고 무게도 가벼워서 가정 환경에 안전하게 통합될 수 있는 최초의 진정한 가정용 로봇이 되었습니다.
1. 일반 로봇의 발전." 로봇 하드웨어는 비용이 많이 들고, 부피가 큰 하드웨어를 사용하여 작업을 수행하기 위해 인간 원격 운영자를 고용하는 것도 마찬가지로 비용이 많이 듭니다. 더욱이, 원격 조작의 효율성은 인간이 직접 작업을 완료할 수 있는 속도에 비해 훨씬 낮을 정도로 매우 낮습니다.
2. 머리에 장착된 카메라를 사람들에게 묶고 살을 덮는 큰 고무장갑을 착용하게 하면 다양한 집안일을 하는 사람들의 대규모 데이터 세트를 빠르게 수집할 수 있습니다. 그리고 임무. 평범한 사람들은 일상 생활에서 무의식적으로 수많은 다양한 행동과 운영 작업을 완료합니다. 원시 모션 출력을 직접 인식하는 데 어려움이 있지만 비디오의 포즈 변화를 분석하여 동작을 추론할 수 있습니다. 이러한 유형의 데이터 수집은 고급 하드웨어가 출시될 때까지 범용 로봇 개발에 대한 장벽을 허무는 데 도움이 될 수 있습니다.
3. 인터넷에는 사람이 수행하는 다양한 활동을 인식하고 학습하도록 로봇을 훈련시킬 수 있는 1인칭 및 3인칭 동영상이 많아 더욱 확장될 수 있습니다. 우리의 데이터 크기.
이러한 유형의 데이터 수집을 확장하기 전에 5000RPM으로 회전하는 모터에 비해 우리 몸에는 빠르게 회전하는 부품이 없다는 점도 중요합니다. , 근육의 운동 에너지 매우 낮습니다. 우리가 움직일 때 운반하는 유효 질량도 훨씬 작습니다. 따라서 로봇의 관절 각도는 인간의 관절 각도와 대략 동일할 수 있지만 회전하는 모터가 제공하는 유효 질량은 작업을 능숙하게 수행하기에는 너무 큽니다.
효율적인 모션 제어 전략을 개발하더라도 로봇은 조명을 쉽게 켜고 끄거나 우아하게 달리는 등의 작업을 수행할 때 여전히 인간의 속도와 유창함에 도달할 수 없습니다. 로봇이 물체를 만질 때 가하는 힘이 인간과 크게 다르기 때문입니다.
따라서 인간의 비디오를 로봇의 움직임 전략으로 신속하게 변환하려면 다음 방법이 필요합니다.
1. NEO와 같이 매우 순응적이고 유연한 로봇
2. 로봇이 비디오를 직접 복사하는 대신 1x보다 느린 속도로 비디오의 모션 궤적을 추적하도록 합니다. 휴먼 하드웨어' 역학. 그러나 이는 정적인 작업에만 적합하며, 옷 개기, 주방에서 음식 준비 등 많은 물체와 접촉이 필요한 작업에는 적합하지 않습니다.
3. 모션 계획과 동적 계획을 분리하여 모션 계획은 목표 위치에 도달하는 데 집중하고 동적 계획은 충돌 발생 시 힘을 제어하는 데 중점을 둡니다.
以上がロボットが手の強さを習得し、安全に家事を行うことはどれほど難しいでしょうか? 1X 人工知能副社長が詳細な説明を執筆の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
声明:
この記事の内容はネチズンが自主的に寄稿したものであり、著作権は原著者に帰属します。このサイトは、それに相当する法的責任を負いません。盗作または侵害の疑いのあるコンテンツを見つけた場合は、admin@php.cn までご連絡ください。